 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowRL: Matching Reward Distributions for LLM Reasoning
Sep 18, 2025We propose FlowRL: matching the full reward distribution via flow balancing instead of maximizing rewards in large language model (LLM) reinforcement learning (RL). Recent advanced reasoning models adopt reward-maximizing methods (\eg, PPO and GRPO), which tend to over-optimize dominant reward signals while neglecting less frequent but valid reasoning paths, thus reducing diversity. In contrast, we transform scalar rewards into a normalized target distribution using a learnable partition function, and then minimize the reverse KL divergence between the policy and the target distribution. We implement this idea as a flow-balanced optimization method that promotes diverse exploration and generalizable reasoning trajectories. We conduct experiments on math and code reasoning tasks: FlowRL achieves a significant average improvement of $10.0\%$ over GRPO and $5.1\%$ over PPO on math benchmarks, and performs consistently better on code reasoning tasks. These results highlight reward distribution-matching as a key step toward efficient exploration and diverse reasoning in LLM reinforcement learning.
DriveMoE: Mixture-of-Experts for Vision-Language-Action Model in End-to-End Autonomous Driving
May 22, 2025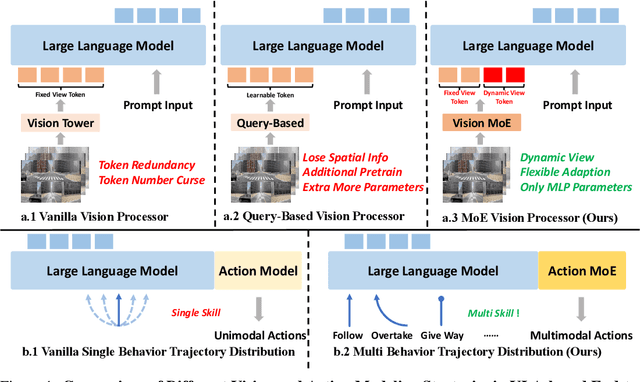
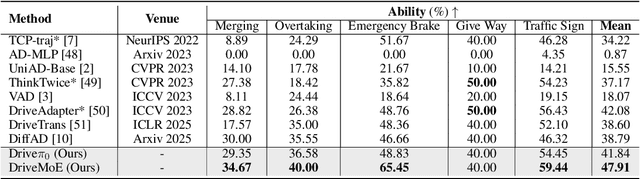
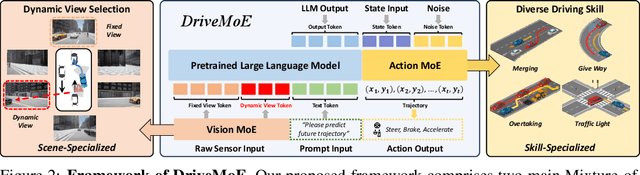
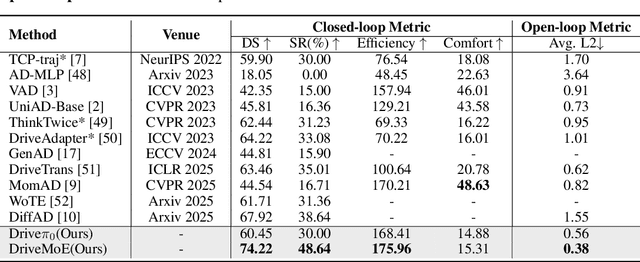
End-to-end autonomous driving (E2E-AD) demands effective processing of multi-view sensory data and robust handling of diverse and complex driving scenarios, particularly rare maneuvers such as aggressive turns. Recent success of Mixture-of-Experts (MoE) architecture in Large Language Models (LLMs) demonstrates that specialization of parameters enables strong scalability. In this work, we propose DriveMoE, a novel MoE-based E2E-AD framework, with a Scene-Specialized Vision MoE and a Skill-Specialized Action MoE. DriveMoE is built upon our $\pi_0$ Vision-Language-Action (VLA) baseline (originally from the embodied AI field), called Drive-$\pi_0$. Specifically, we add Vision MoE to Drive-$\pi_0$ by training a router to select relevant cameras according to the driving context dynamically. This design mirrors human driving cognition, where drivers selectively attend to crucial visual cues rather than exhaustively processing all visual information. In addition, we add Action MoE by training another router to activate specialized expert modules for different driving behaviors. Through explicit behavioral specialization, DriveMoE is able to handle diverse scenarios without suffering from modes averaging like existing models. In Bench2Drive closed-loop evaluation experiments, DriveMoE achieves state-of-the-art (SOTA) performance, demonstrating the effectiveness of combining vision and action MoE in autonomous driving tasks. We will release our code and models of DriveMoE and Drive-$\pi_0$.
Raw2Drive: Reinforcement Learning with Aligned World Models for End-to-End Autonomous Driving (in CARLA v2)
May 22, 2025Reinforcement Learning (RL) can mitigate the causal confusion and distribution shift inherent to imitation learning (IL). However, applying RL to end-to-end autonomous driving (E2E-AD) remains an open problem for its training difficulty, and IL is still the mainstream paradigm in both academia and industry. Recently Model-based Reinforcement Learning (MBRL) have demonstrated promising results in neural planning; however, these methods typically require privileged information as input rather than raw sensor data. We fill this gap by designing Raw2Drive, a dual-stream MBRL approach. Initially, we efficiently train an auxiliary privileged world model paired with a neural planner that uses privileged information as input. Subsequently, we introduce a raw sensor world model trained via our proposed Guidance Mechanism, which ensures consistency between the raw sensor world model and the privileged world model during rollouts. Finally, the raw sensor world model combines the prior knowledge embedded in the heads of the privileged world model to effectively guide the training of the raw sensor policy. Raw2Drive is so far the only RL based end-to-end method on CARLA Leaderboard 2.0, and Bench2Drive and it achieves state-of-the-art performance.
UniZero: Generalized and Efficient Planning with Scalable Latent World Models
Jun 15, 2024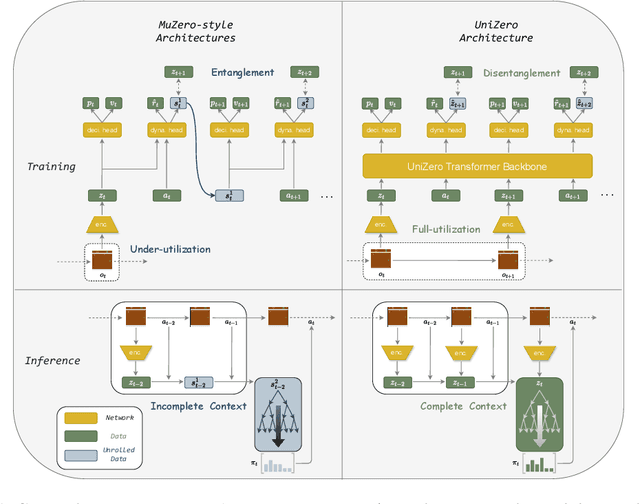
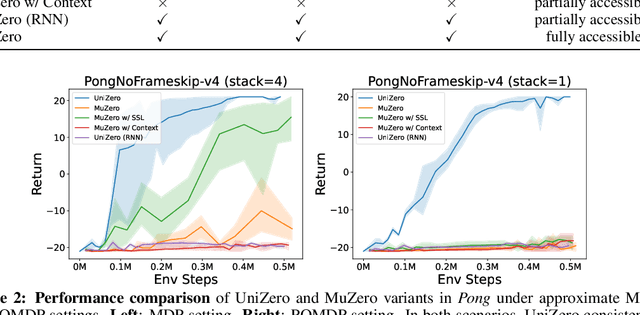
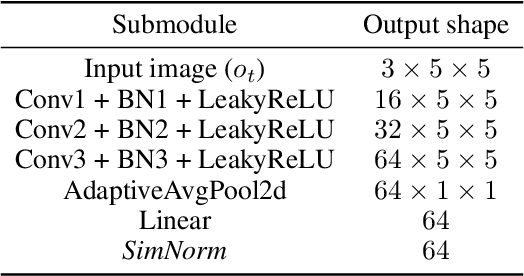
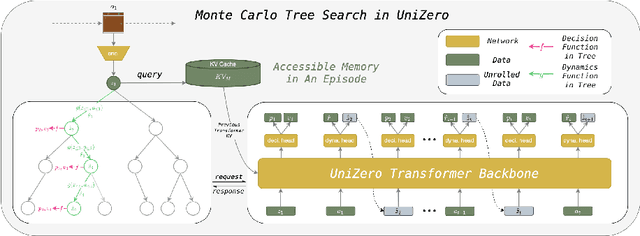
Learning predictive world models is essential for enhancing the planning capabilities of reinforcement learning agents. Notably, the MuZero-style algorithms, based on the value equivalence principle and Monte Carlo Tree Search (MCTS), have achieved superhuman performance in various domains. However, in environments that require capturing long-term dependencies, MuZero's performance deteriorates rapidly. We identify that this is partially due to the \textit{entanglement} of latent representations with historical information, which results in incompatibility with the auxiliary self-supervised state regularization. To overcome this limitation, we present \textit{UniZero}, a novel approach that \textit{disentangles} latent states from implicit latent history using a transformer-based latent world model. By concurrently predicting latent dynamics and decision-oriented quantities conditioned on the learned latent history, UniZero enables joint optimization of the long-horizon world model and policy, facilitating broader and more efficient planning in latent space. We demonstrate that UniZero, even with single-frame inputs, matches or surpasses the performance of MuZero-style algorithms on the Atari 100k benchmark. Furthermore, it significantly outperforms prior baselines in benchmarks that require long-term memory. Lastly, we validate the effectiveness and scalability of our design choices through extensive ablation studies, visual analyses, and multi-task learning results. The code is available at \textcolor{magenta}{https://github.com/opendilab/LightZero}.
Bench2Drive: Towards Multi-Ability Benchmarking of Closed-Loop End-To-End Autonomous Driving
Jun 06, 2024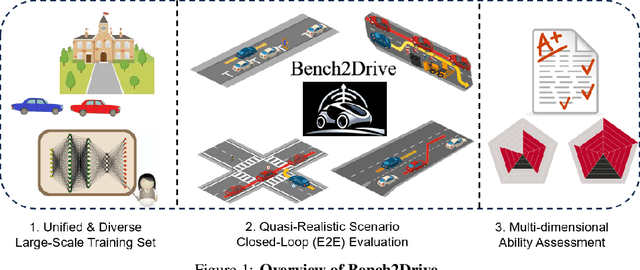
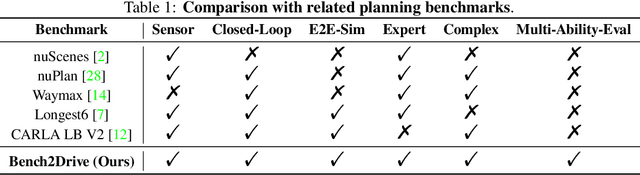
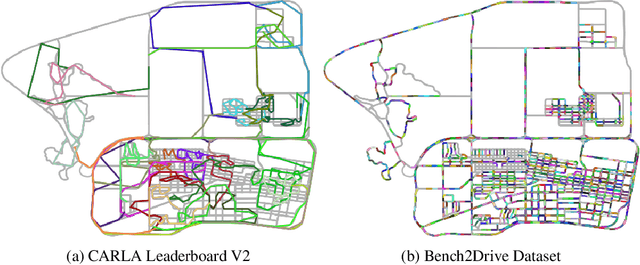

In an era marked by the rapid scaling of foundation models, autonomous driving technologies are approaching a transformative threshold where end-to-end autonomous driving (E2E-AD) emerges due to its potential of scaling up in the data-driven manner. However, existing E2E-AD methods are mostly evaluated under the open-loop log-replay manner with L2 errors and collision rate as metrics (e.g., in nuScenes), which could not fully reflect the driving performance of algorithms as recently acknowledged in the community. For those E2E-AD methods evaluated under the closed-loop protocol, they are tested in fixed routes (e.g., Town05Long and Longest6 in CARLA) with the driving score as metrics, which is known for high variance due to the unsmoothed metric function and large randomness in the long route. Besides, these methods usually collect their own data for training, which makes algorithm-level fair comparison infeasible. To fulfill the paramount need of comprehensive, realistic, and fair testing environments for Full Self-Driving (FSD), we present Bench2Drive, the first benchmark for evaluating E2E-AD systems' multiple abilities in a closed-loop manner. Bench2Drive's official training data consists of 2 million fully annotated frames, collected from 10000 short clips uniformly distributed under 44 interactive scenarios (cut-in, overtaking, detour, etc), 23 weathers (sunny, foggy, rainy, etc), and 12 towns (urban, village, university, etc) in CARLA v2. Its evaluation protocol requires E2E-AD models to pass 44 interactive scenarios under different locations and weathers which sums up to 220 routes and thus provides a comprehensive and disentangled assessment about their driving capability under different situations. We implement state-of-the-art E2E-AD models and evaluate them in Bench2Drive, providing insights regarding current status and future directions.
A Survey of Large Language Models for Autonomous Driving
Nov 02, 2023
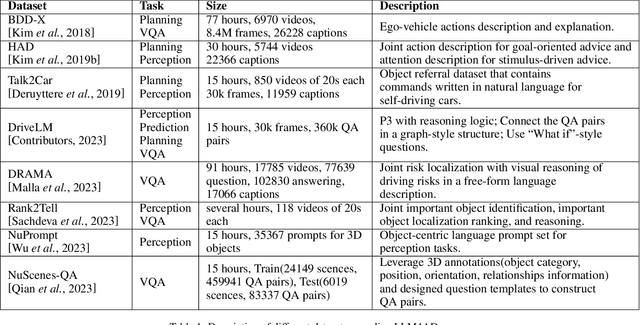

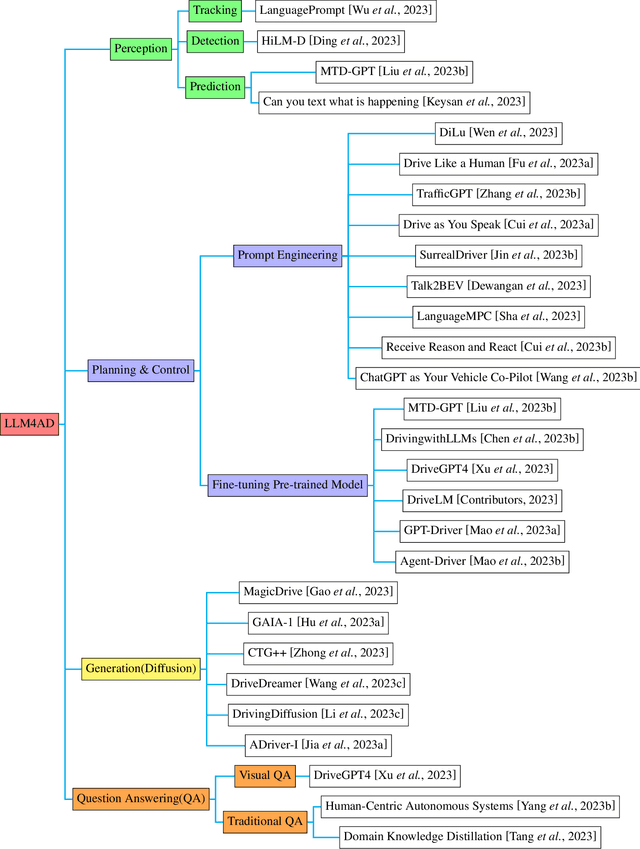
Autonomous driving technology, a catalyst for revolutionizing transportation and urban mobility, has the tend to transition from rule-based systems to data-driven strategies. Traditional module-based systems are constrained by cumulative errors among cascaded modules and inflexible pre-set rules. In contrast, end-to-end autonomous driving systems have the potential to avoid error accumulation due to their fully data-driven training process, although they often lack transparency due to their ``black box" nature, complicating the validation and traceability of decisions. Recently, large language models (LLMs) have demonstrated abilities including understanding context, logical reasoning, and generating answers. A natural thought is to utilize these abilities to empower autonomous driving. By combining LLM with foundation vision models, it could open the door to open-world understanding, reasoning, and few-shot learning, which current autonomous driving systems are lacking. In this paper, we systematically review a research line about \textit{Large Language Models for Autonomous Driving (LLM4AD)}. This study evaluates the current state of technological advancements, distinctly outlining the principal challenges and prospective directions for the field. For the convenience of researchers in academia and industry, we provide real-time updates on the latest advances in the field as well as relevant open-source resources via the designated link: https://github.com/Thinklab-SJTU/Awesome-LLM4AD.
LightZero: A Unified Benchmark for Monte Carlo Tree Search in General Sequential Decision Scenarios
Oct 12, 2023



Building agents based on tree-search planning capabilities with learned models has achieved remarkable success in classic decision-making problems, such as Go and Atari. However, it has been deemed challenging or even infeasible to extend Monte Carlo Tree Search (MCTS) based algorithms to diverse real-world applications, especially when these environments involve complex action spaces and significant simulation costs, or inherent stochasticity. In this work, we introduce LightZero, the first unified benchmark for deploying MCTS/MuZero in general sequential decision scenarios. Specificially, we summarize the most critical challenges in designing a general MCTS-style decision-making solver, then decompose the tightly-coupled algorithm and system design of tree-search RL methods into distinct sub-modules. By incorporating more appropriate exploration and optimization strategies, we can significantly enhance these sub-modules and construct powerful LightZero agents to tackle tasks across a wide range of domains, such as board games, Atari, MuJoCo, MiniGrid and GoBigger. Detailed benchmark results reveal the significant potential of such methods in building scalable and efficient decision intelligence. The code is available as part of OpenDILab at https://github.com/opendilab/LightZero.
Normalization Enhances Generalization in Visual Reinforcement Learning
Jun 01, 2023



Recent advances in visual reinforcement learning (RL) have led to impressive success in handling complex tasks. However, these methods have demonstrated limited generalization capability to visual disturbances, which poses a significant challenge for their real-world application and adaptability. Though normalization techniques have demonstrated huge success in supervised and unsupervised learning, their applications in visual RL are still scarce. In this paper, we explore the potential benefits of integrating normalization into visual RL methods with respect to generalization performance. We find that, perhaps surprisingly, incorporating suitable normalization techniques is sufficient to enhance the generalization capabilities, without any additional special design. We utilize the combination of two normalization techniques, CrossNorm and SelfNorm, for generalizable visual RL. Extensive experiments are conducted on DMControl Generalization Benchmark and CARLA to validate the effectiveness of our method. We show that our method significantly improves generalization capability while only marginally affecting sample efficiency. In particular, when integrated with DrQ-v2, our method enhances the test performance of DrQ-v2 on CARLA across various scenarios, from 14% of the training performance to 97%.