 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniZero: Generalized and Efficient Planning with Scalable Latent World Models
Paper and Code
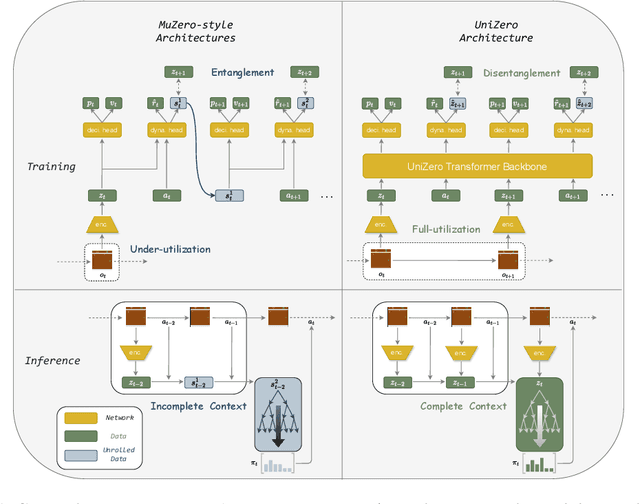
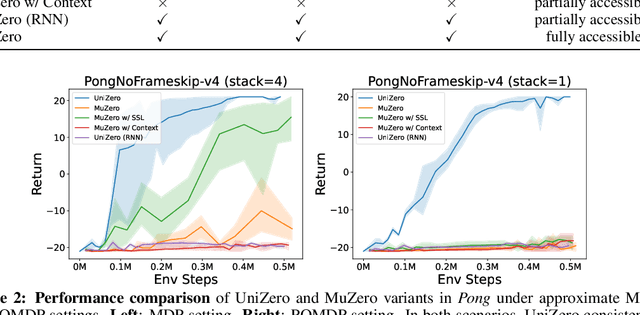
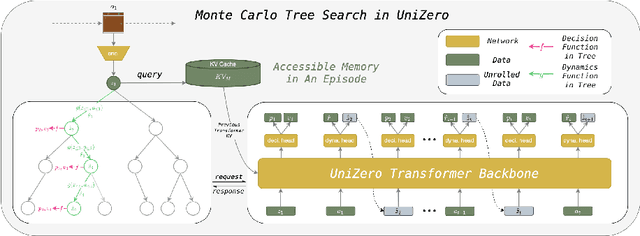
Learning predictive world models is essential for enhancing the planning capabilities of reinforcement learning agents. Notably, the MuZero-style algorithms, based on the value equivalence principle and Monte Carlo Tree Search (MCTS), have achieved superhuman performance in various domains. However, in environments that require capturing long-term dependencies, MuZero's performance deteriorates rapidly. We identify that this is partially due to the \textit{entanglement} of latent representations with historical information, which results in incompatibility with the auxiliary self-supervised state regularization. To overcome this limitation, we present \textit{UniZero}, a novel approach that \textit{disentangles} latent states from implicit latent history using a transformer-based latent world model. By concurrently predicting latent dynamics and decision-oriented quantities conditioned on the learned latent history, UniZero enables joint optimization of the long-horizon world model and policy, facilitating broader and more efficient planning in latent space. We demonstrate that UniZero, even with single-frame inputs, matches or surpasses the performance of MuZero-style algorithms on the Atari 100k benchmark. Furthermore, it significantly outperforms prior baselines in benchmarks that require long-term memory. Lastly, we validate the effectiveness and scalability of our design choices through extensive ablation studies, visual analyses, and multi-task learning results. The code is available at \textcolor{magenta}{https://github.com/opendilab/LightZero}.