 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoE-CAP: Benchmarking Cost, Accuracy and Performance of Sparse Mixture-of-Experts Systems
May 16, 2025The sparse Mixture-of-Experts (MoE) architecture is increasingly favored for scaling Large Language Models (LLMs) efficiently, but it depends on heterogeneous compute and memory resources. These factors jointly affect system Cost, Accuracy, and Performance (CAP), making trade-offs inevitable. Existing benchmarks often fail to capture these trade-offs accurately, complicating practical deployment decisions. To address this, we introduce MoE-CAP, a benchmark specifically designed for MoE systems. Our analysis reveals that achieving an optimal balance across CAP is difficult with current hardware; MoE systems typically optimize two of the three dimensions at the expense of the third-a dynamic we term the MoE-CAP trade-off. To visualize this, we propose the CAP Radar Diagram. We further introduce sparsity-aware performance metrics-Sparse Memory Bandwidth Utilization (S-MBU) and Sparse Model FLOPS Utilization (S-MFU)-to enable accurate performance benchmarking of MoE systems across diverse hardware platforms and deployment scenarios.
MoE-Gen: High-Throughput MoE Inference on a Single GPU with Module-Based Batching
Mar 12, 2025This paper presents MoE-Gen, a high-throughput MoE inference system optimized for single-GPU execution. Existing inference systems rely on model-based or continuous batching strategies, originally designed for interactive inference, which result in excessively small batches for MoE's key modules-attention and expert modules-leading to poor throughput. To address this, we introduce module-based batching, which accumulates tokens in host memory and dynamically launches large batches on GPUs to maximize utilization. Additionally, we optimize the choice of batch sizes for each module in an MoE to fully overlap GPU computation and communication, maximizing throughput. Evaluation demonstrates that MoE-Gen achieves 8-31x higher throughput compared to state-of-the-art systems employing model-based batching (FlexGen, MoE-Lightning, DeepSpeed), and offers even greater throughput improvements over continuous batching systems (e.g., vLLM and Ollama) on popular MoE models (DeepSeek and Mixtral) across offline inference tasks. MoE-Gen's source code is publicly available at https://github.com/EfficientMoE/MoE-Gen
MoE-CAP: Cost-Accuracy-Performance Benchmarking for Mixture-of-Experts Systems
Dec 10, 2024The sparse Mixture-of-Experts (MoE) architecture is increasingly favored for scaling Large Language Models (LLMs) efficiently; however, MoE systems rely on heterogeneous compute and memory resources. These factors collectively influence the system's Cost, Accuracy, and Performance (CAP), creating a challenging trade-off. Current benchmarks often fail to provide precise estimates of these effects, complicating practical considerations for deploying MoE systems. To bridge this gap, we introduce MoE-CAP, a benchmark specifically designed to evaluate MoE systems. Our findings highlight the difficulty of achieving an optimal balance of cost, accuracy, and performance with existing hardware capabilities. MoE systems often necessitate compromises on one factor to optimize the other two, a dynamic we term the MoE-CAP trade-off. To identify the best trade-off, we propose novel performance evaluation metrics - Sparse Memory Bandwidth Utilization (S-MBU) and Sparse Model FLOPS Utilization (S-MFU) - and develop cost models that account for the heterogeneous compute and memory hardware integral to MoE systems. This benchmark is publicly available on HuggingFace: https://huggingface.co/spaces/sparse-generative-ai/open-moe-llm-leaderboard.
Spin-UP: Spin Light for Natural Light Uncalibrated Photometric Stereo
Apr 02, 2024



Natural Light Uncalibrated Photometric Stereo (NaUPS) relieves the strict environment and light assumptions in classical Uncalibrated Photometric Stereo (UPS) methods. However, due to the intrinsic ill-posedness and high-dimensional ambiguities, addressing NaUPS is still an open question. Existing works impose strong assumptions on the environment lights and objects' material, restricting the effectiveness in more general scenarios. Alternatively, some methods leverage supervised learning with intricate models while lacking interpretability, resulting in a biased estimation. In this work, we proposed Spin Light Uncalibrated Photometric Stereo (Spin-UP), an unsupervised method to tackle NaUPS in various environment lights and objects. The proposed method uses a novel setup that captures the object's images on a rotatable platform, which mitigates NaUPS's ill-posedness by reducing unknowns and provides reliable priors to alleviate NaUPS's ambiguities. Leveraging neural inverse rendering and the proposed training strategies, Spin-UP recovers surface normals, environment light, and isotropic reflectance under complex natural light with low computational cost. Experiments have shown that Spin-UP outperforms other supervised / unsupervised NaUPS methods and achieves state-of-the-art performance on synthetic and real-world datasets. Codes and data are available at https://github.com/LMozart/CVPR2024-SpinUP.
MoE-Infinity: Activation-Aware Expert Offloading for Efficient MoE Serving
Jan 25, 2024



This paper presents MoE-Infinity, a cost-efficient mixture-of-expert (MoE) serving system that realizes activation-aware expert offloading. MoE-Infinity features sequence-level expert activation tracing, a new approach adept at identifying sparse activations and capturing the temporal locality of MoE inference. By analyzing these traces, MoE-Infinity performs novel activation-aware expert prefetching and caching, substantially reducing the latency overheads usually associated with offloading experts for improved cost performance. Extensive experiments in a cluster show that MoE-Infinity outperforms numerous existing systems and approaches, reducing latency by 4 - 20X and decreasing deployment costs by over 8X for various MoEs. MoE-Infinity's source code is publicly available at https://github.com/TorchMoE/MoE-Infinity
Pano-NeRF: Synthesizing High Dynamic Range Novel Views with Geometry from Sparse Low Dynamic Range Panoramic Images
Dec 26, 2023Panoramic imaging research on geometry recovery and High Dynamic Range (HDR) reconstruction becomes a trend with the development of Extended Reality (XR). Neural Radiance Fields (NeRF) provide a promising scene representation for both tasks without requiring extensive prior data. However, in the case of inputting sparse Low Dynamic Range (LDR) panoramic images, NeRF often degrades with under-constrained geometry and is unable to reconstruct HDR radiance from LDR inputs. We observe that the radiance from each pixel in panoramic images can be modeled as both a signal to convey scene lighting information and a light source to illuminate other pixels. Hence, we propose the irradiance fields from sparse LDR panoramic images, which increases the observation counts for faithful geometry recovery and leverages the irradiance-radiance attenuation for HDR reconstruction. Extensive experiments demonstrate that the irradiance fields outperform state-of-the-art methods on both geometry recovery and HDR reconstruction and validate their effectiveness. Furthermore, we show a promising byproduct of spatially-varying lighting estimation. The code is available at https://github.com/Lu-Zhan/Pano-NeRF.
NTIRE 2022 Challenge on High Dynamic Range Imaging: Methods and Results
May 25, 2022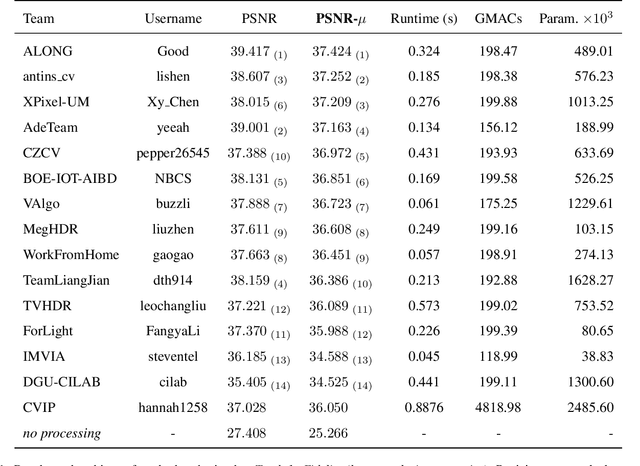
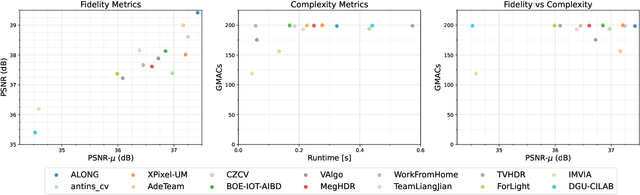
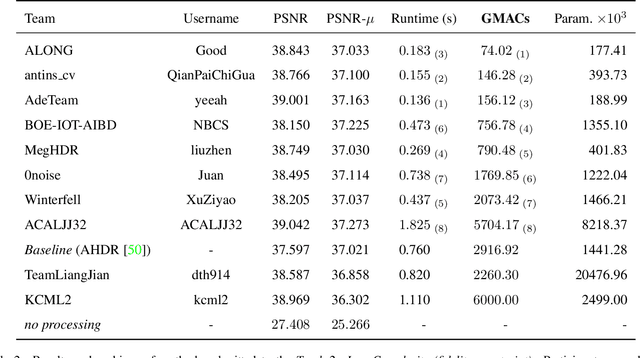
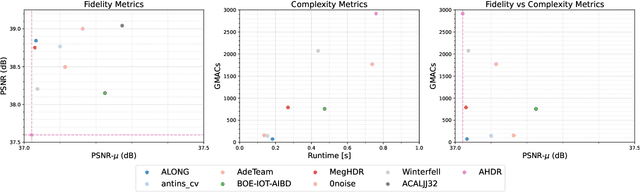
This paper reviews the challenge on constrained high dynamic range (HDR) imaging that was part of the New Trends in Image Restoration and Enhancement (NTIRE) workshop, held in conjunction with CVPR 2022. This manuscript focuses on the competition set-up, datasets, the proposed methods and their results. The challenge aims at estimating an HDR image from multiple respective low dynamic range (LDR) observations, which might suffer from under- or over-exposed regions and different sources of noise. The challenge is composed of two tracks with an emphasis on fidelity and complexity constraints: In Track 1, participants are asked to optimize objective fidelity scores while imposing a low-complexity constraint (i.e. solutions can not exceed a given number of operations). In Track 2, participants are asked to minimize the complexity of their solutions while imposing a constraint on fidelity scores (i.e. solutions are required to obtain a higher fidelity score than the prescribed baseline). Both tracks use the same data and metrics: Fidelity is measured by means of PSNR with respect to a ground-truth HDR image (computed both directly and with a canonical tonemapping operation), while complexity metrics include the number of Multiply-Accumulate (MAC) operations and runtime (in seconds).
* CVPR Workshops 2022. 15 pages, 21 figures, 2 tables