 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStereoAdapter-2: Globally Structure-Consistent Underwater Stereo Depth Estimation
Feb 18, 2026Stereo depth estimation is fundamental to underwater robotic perception, yet suffers from severe domain shifts caused by wavelength-dependent light attenuation, scattering, and refraction. Recent approaches leverage monocular foundation models with GRU-based iterative refinement for underwater adaptation; however, the sequential gating and local convolutional kernels in GRUs necessitate multiple iterations for long-range disparity propagation, limiting performance in large-disparity and textureless underwater regions. In this paper, we propose StereoAdapter-2, which replaces the conventional ConvGRU updater with a novel ConvSS2D operator based on selective state space models. The proposed operator employs a four-directional scanning strategy that naturally aligns with epipolar geometry while capturing vertical structural consistency, enabling efficient long-range spatial propagation within a single update step at linear computational complexity. Furthermore, we construct UW-StereoDepth-80K, a large-scale synthetic underwater stereo dataset featuring diverse baselines, attenuation coefficients, and scattering parameters through a two-stage generative pipeline combining semantic-aware style transfer and geometry-consistent novel view synthesis. Combined with dynamic LoRA adaptation inherited from StereoAdapter, our framework achieves state-of-the-art zero-shot performance on underwater benchmarks with 17% improvement on TartanAir-UW and 7.2% improvment on SQUID, with real-world validation on the BlueROV2 platform demonstrates the robustness of our approach. Code: https://github.com/AIGeeksGroup/StereoAdapter-2. Website: https://aigeeksgroup.github.io/StereoAdapter-2.
AnyDepth: Depth Estimation Made Easy
Jan 06, 2026Monocular depth estimation aims to recover the depth information of 3D scenes from 2D images. Recent work has made significant progress, but its reliance on large-scale datasets and complex decoders has limited its efficiency and generalization ability. In this paper, we propose a lightweight and data-centric framework for zero-shot monocular depth estimation. We first adopt DINOv3 as the visual encoder to obtain high-quality dense features. Secondly, to address the inherent drawbacks of the complex structure of the DPT, we design the Simple Depth Transformer (SDT), a compact transformer-based decoder. Compared to the DPT, it uses a single-path feature fusion and upsampling process to reduce the computational overhead of cross-scale feature fusion, achieving higher accuracy while reducing the number of parameters by approximately 85%-89%. Furthermore, we propose a quality-based filtering strategy to filter out harmful samples, thereby reducing dataset size while improving overall training quality. Extensive experiments on five benchmarks demonstrate that our framework surpasses the DPT in accuracy. This work highlights the importance of balancing model design and data quality for achieving efficient and generalizable zero-shot depth estimation. Code: https://github.com/AIGeeksGroup/AnyDepth. Website: https://aigeeksgroup.github.io/AnyDepth.
GR-Dexter Technical Report
Dec 30, 2025Vision-language-action (VLA) models have enabled language-conditioned, long-horizon robot manipulation, but most existing systems are limited to grippers. Scaling VLA policies to bimanual robots with high degree-of-freedom (DoF) dexterous hands remains challenging due to the expanded action space, frequent hand-object occlusions, and the cost of collecting real-robot data. We present GR-Dexter, a holistic hardware-model-data framework for VLA-based generalist manipulation on a bimanual dexterous-hand robot. Our approach combines the design of a compact 21-DoF robotic hand, an intuitive bimanual teleoperation system for real-robot data collection, and a training recipe that leverages teleoperated robot trajectories together with large-scale vision-language and carefully curated cross-embodiment datasets. Across real-world evaluations spanning long-horizon everyday manipulation and generalizable pick-and-place, GR-Dexter achieves strong in-domain performance and improved robustness to unseen objects and unseen instructions. We hope GR-Dexter serves as a practical step toward generalist dexterous-hand robotic manipulation.
Simple is what you need for efficient and accurate medical image segmentation
Jun 16, 2025While modern segmentation models often prioritize performance over practicality, we advocate a design philosophy prioritizing simplicity and efficiency, and attempted high performance segmentation model design. This paper presents SimpleUNet, a scalable ultra-lightweight medical image segmentation model with three key innovations: (1) A partial feature selection mechanism in skip connections for redundancy reduction while enhancing segmentation performance; (2) A fixed-width architecture that prevents exponential parameter growth across network stages; (3) An adaptive feature fusion module achieving enhanced representation with minimal computational overhead. With a record-breaking 16 KB parameter configuration, SimpleUNet outperforms LBUNet and other lightweight benchmarks across multiple public datasets. The 0.67 MB variant achieves superior efficiency (8.60 GFLOPs) and accuracy, attaining a mean DSC/IoU of 85.76%/75.60% on multi-center breast lesion datasets, surpassing both U-Net and TransUNet. Evaluations on skin lesion datasets (ISIC 2017/2018: mDice 84.86%/88.77%) and endoscopic polyp segmentation (KVASIR-SEG: 86.46%/76.48% mDice/mIoU) confirm consistent dominance over state-of-the-art models. This work demonstrates that extreme model compression need not compromise performance, providing new insights for efficient and accurate medical image segmentation. Codes can be found at https://github.com/Frankyu5666666/SimpleUNet.
Two-Stage Random Alternation Framework for Zero-Shot Pansharpening
May 10, 2025In recent years, pansharpening has seen rapid advancements with deep learning methods, which have demonstrated impressive fusion quality. However, the challenge of acquiring real high-resolution images limits the practical applicability of these methods. To address this, we propose a two-stage random alternating framework (TRA-PAN) that effectively integrates strong supervision constraints from reduced-resolution images with the physical characteristics of full-resolution images. The first stage introduces a pre-training procedure, which includes Degradation-Aware Modeling (DAM) to capture spatial-spectral degradation mappings, alongside a warm-up procedure designed to reduce training time and mitigate the negative effects of reduced-resolution data. In the second stage, Random Alternation Optimization (RAO) is employed, where random alternating training leverages the strengths of both reduced- and full-resolution images, further optimizing the fusion model. By primarily relying on full-resolution images, our method enables zero-shot training with just a single image pair, obviating the need for large datasets. Experimental results demonstrate that TRA-PAN outperforms state-of-the-art (SOTA) methods in both quantitative metrics and visual quality in real-world scenarios, highlighting its strong practical applicability.
In-Hand Re-grasp Manipulation with Passive Dynamic Actions via Imitation Learning
Sep 27, 2023Re-grasp manipulation leverages on ergonomic tools to assist humans in accomplishing diverse tasks. In certain scenarios, humans often employ external forces to effortlessly and precisely re-grasp tools like a hammer. Previous development on controllers for in-grasp sliding motion using passive dynamic actions (e.g.,gravity) relies on apprehension of finger-object contact information, and requires customized design for individual objects with varied geometry and weight distribution. It limits their adaptability to diverse objects. In this paper, we propose an end-to-end sliding motion controller based on imitation learning (IL) that necessitates minimal prior knowledge of object mechanics, relying solely on object position information. To expedite training convergence, we utilize a data glove to collect expert data trajectories and train the policy through Generative Adversarial Imitation Learning (GAIL). Simulation results demonstrate the controller's versatility in performing in-hand sliding tasks with objects of varying friction coefficients, geometric shapes, and masses. By migrating to a physical system using visual position estimation, the controller demonstrated an average success rate of 86%, surpassing the baseline algorithm's success rate of 35% of Behavior Cloning(BC) and 20% of Proximal Policy Optimization (PPO).
Exploring Turkish Speech Recognition via Hybrid CTC/Attention Architecture and Multi-feature Fusion Network
Mar 22, 2023



In recent years, End-to-End speech recognition technology based on deep learning has developed rapidly. Due to the lack of Turkish speech data, the performance of Turkish speech recognition system is poor. Firstly, this paper studies a series of speech recognition tuning technologies. The results show that the performance of the model is the best when the data enhancement technology combining speed perturbation with noise addition is adopted and the beam search width is set to 16. Secondly, to maximize the use of effective feature information and improve the accuracy of feature extraction, this paper proposes a new feature extractor LSPC. LSPC and LiGRU network are combined to form a shared encoder structure, and model compression is realized. The results show that the performance of LSPC is better than MSPC and VGGnet when only using Fbank features, and the WER is improved by 1.01% and 2.53% respectively. Finally, based on the above two points, a new multi-feature fusion network is proposed as the main structure of the encoder. The results show that the WER of the proposed feature fusion network based on LSPC is improved by 0.82% and 1.94% again compared with the single feature (Fbank feature and Spectrogram feature) extraction using LSPC. Our model achieves performance comparable to that of advanced End-to-End models.
Flexible Disaster Response of Tomorrow -- Final Presentation and Evaluation of the CENTAURO System
Sep 19, 2019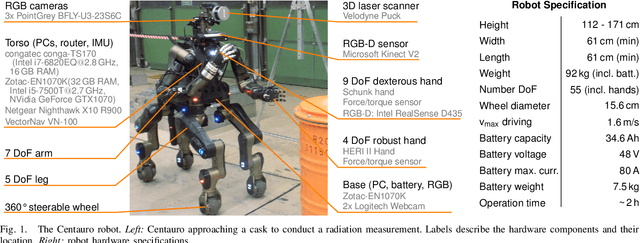
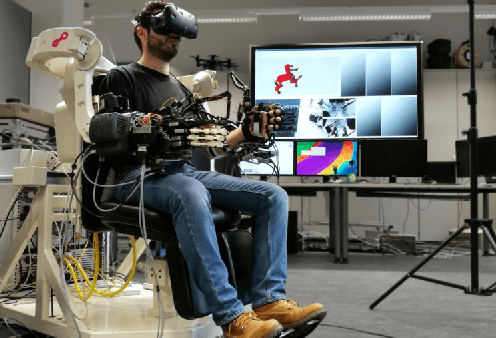
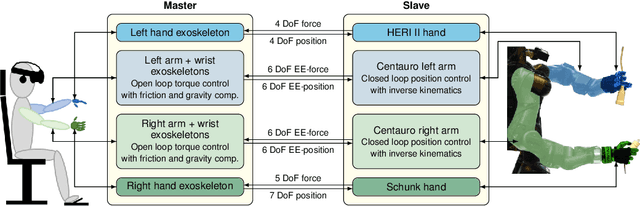
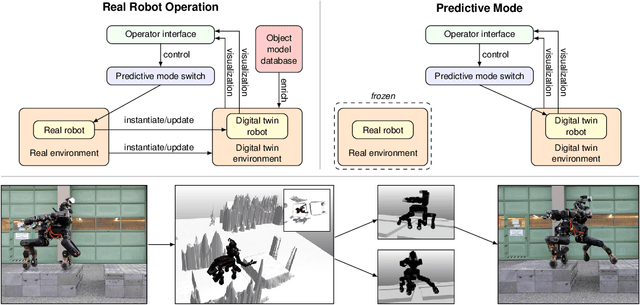
Mobile manipulation robots have high potential to support rescue forces in disaster-response missions. Despite the difficulties imposed by real-world scenarios, robots are promising to perform mission tasks from a safe distance. In the CENTAURO project, we developed a disaster-response system which consists of the highly flexible Centauro robot and suitable control interfaces including an immersive tele-presence suit and support-operator controls on different levels of autonomy. In this article, we give an overview of the final CENTAURO system. In particular, we explain several high-level design decisions and how those were derived from requirements and extensive experience of Kerntechnische Hilfsdienst GmbH, Karlsruhe, Germany (KHG). We focus on components which were recently integrated and report about a systematic evaluation which demonstrated system capabilities and revealed valuable insights.