 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn empirical study of next-basket recommendations
Dec 05, 2023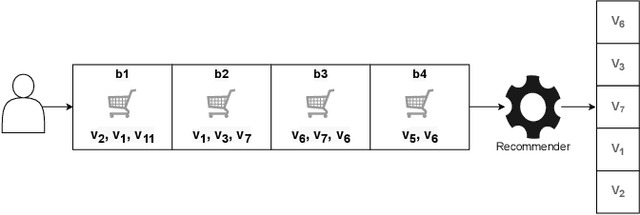
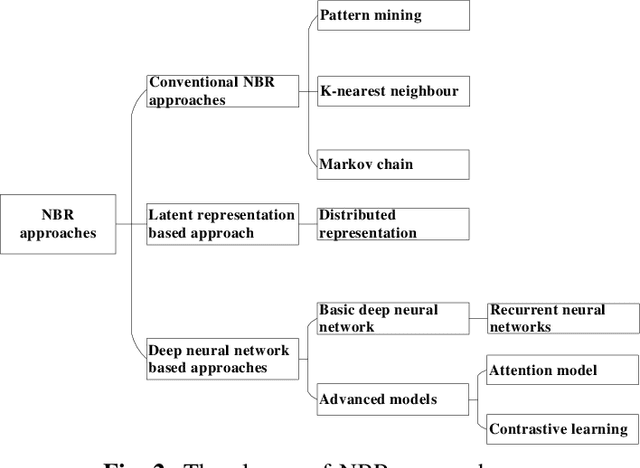
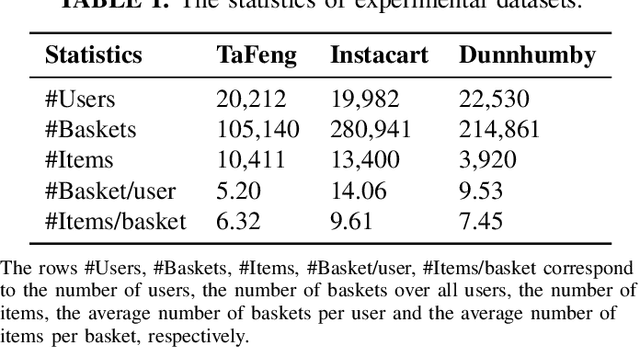
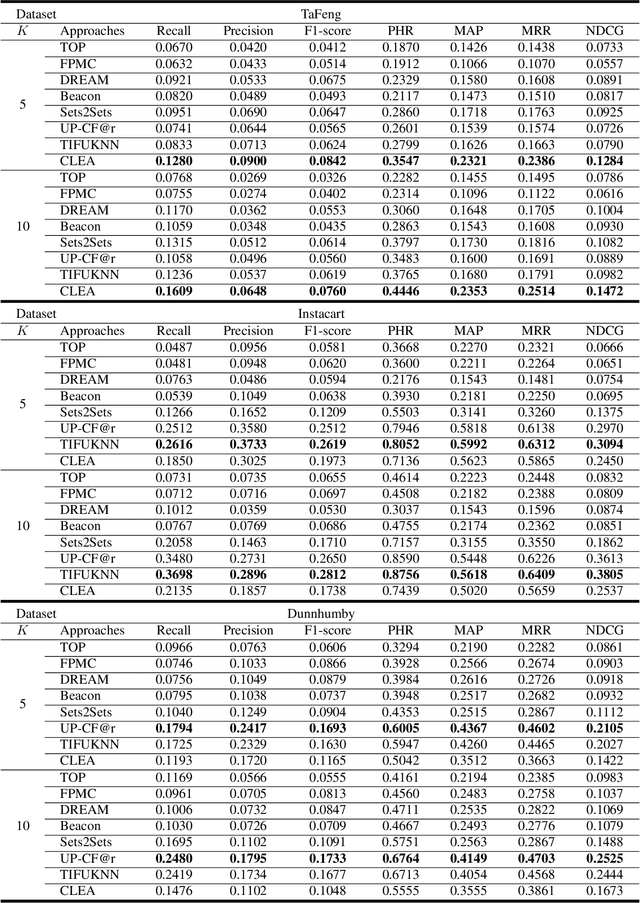
Next Basket Recommender Systems (NBRs) function to recommend the subsequent shopping baskets for users through the modeling of their preferences derived from purchase history, typically manifested as a sequence of historical baskets. Given their widespread applicability in the E-commerce industry, investigations into NBRs have garnered increased attention in recent years. Despite the proliferation of diverse NBR methodologies, a substantial challenge lies in the absence of a systematic and unified evaluation framework across these methodologies. Various studies frequently appraise NBR approaches using disparate datasets and diverse experimental settings, impeding a fair and effective comparative assessment of methodological performance. To bridge this gap, this study undertakes a systematic empirical inquiry into NBRs, reviewing seminal works within the domain and scrutinizing their respective merits and drawbacks. Subsequently, we implement designated NBR algorithms on uniform datasets, employing consistent experimental configurations, and assess their performances via identical metrics. This methodological rigor establishes a cohesive framework for the impartial evaluation of diverse NBR approaches. It is anticipated that this study will furnish a robust foundation and serve as a pivotal reference for forthcoming research endeavors in this dynamic field.
In-Hand Re-grasp Manipulation with Passive Dynamic Actions via Imitation Learning
Sep 27, 2023Re-grasp manipulation leverages on ergonomic tools to assist humans in accomplishing diverse tasks. In certain scenarios, humans often employ external forces to effortlessly and precisely re-grasp tools like a hammer. Previous development on controllers for in-grasp sliding motion using passive dynamic actions (e.g.,gravity) relies on apprehension of finger-object contact information, and requires customized design for individual objects with varied geometry and weight distribution. It limits their adaptability to diverse objects. In this paper, we propose an end-to-end sliding motion controller based on imitation learning (IL) that necessitates minimal prior knowledge of object mechanics, relying solely on object position information. To expedite training convergence, we utilize a data glove to collect expert data trajectories and train the policy through Generative Adversarial Imitation Learning (GAIL). Simulation results demonstrate the controller's versatility in performing in-hand sliding tasks with objects of varying friction coefficients, geometric shapes, and masses. By migrating to a physical system using visual position estimation, the controller demonstrated an average success rate of 86%, surpassing the baseline algorithm's success rate of 35% of Behavior Cloning(BC) and 20% of Proximal Policy Optimization (PPO).
A Systematical Evaluation for Next-Basket Recommendation Algorithms
Sep 07, 2022
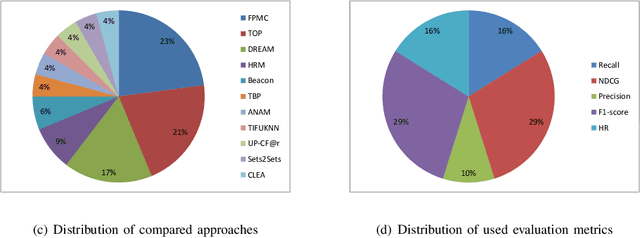
Next basket recommender systems (NBRs) aim to recommend a user's next (shopping) basket of items via modeling the user's preferences towards items based on the user's purchase history, usually a sequence of historical baskets. Due to its wide applicability in the real-world E-commerce industry, the studies NBR have attracted increasing attention in recent years. NBRs have been widely studied and much progress has been achieved in this area with a variety of NBR approaches having been proposed. However, an important issue is that there is a lack of a systematic and unified evaluation over the various NBR approaches. Different studies often evaluate NBR approaches on different datasets, under different experimental settings, making it hard to fairly and effectively compare the performance of different NBR approaches. To bridge this gap, in this work, we conduct a systematical empirical study in NBR area. Specifically, we review the representative work in NBR and analyze their cons and pros. Then, we run the selected NBR algorithms on the same datasets, under the same experimental setting and evaluate their performances using the same measurements. This provides a unified framework to fairly compare different NBR approaches. We hope this study can provide a valuable reference for the future research in this vibrant area.