 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMTR-DuplexBench: Towards a Comprehensive Evaluation of Multi-Round Conversations for Full-Duplex Speech Language Models
Nov 13, 2025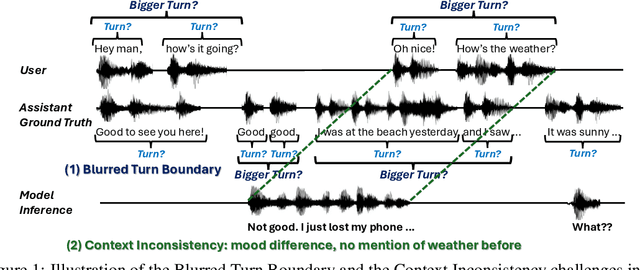
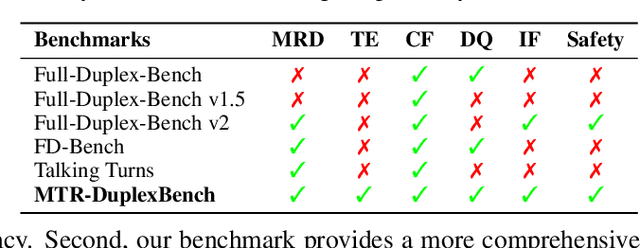
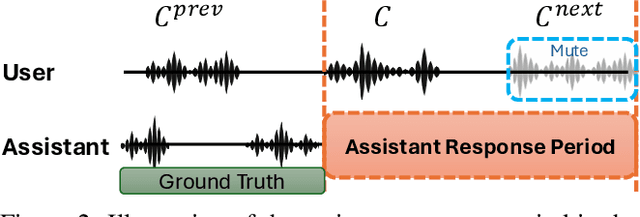

Full-Duplex Speech Language Models (FD-SLMs) enable real-time, overlapping conversational interactions, offering a more dynamic user experience compared to traditional half-duplex models. However, existing benchmarks primarily focus on evaluating single-round interactions and conversational features, neglecting the complexities of multi-round communication and critical capabilities such as instruction following and safety. Evaluating FD-SLMs in multi-round settings poses significant challenges, including blurred turn boundaries in communication and context inconsistency during model inference. To address these gaps, we introduce MTR-DuplexBench, a novel benchmark that segments continuous full-duplex dialogues into discrete turns, enabling comprehensive, turn-by-turn evaluation of FD-SLMs across dialogue quality, conversational dynamics, instruction following, and safety. Experimental results reveal that current FD-SLMs face difficulties in maintaining consistent performance across multiple rounds and evaluation dimensions, highlighting the necessity and effectiveness of our proposed benchmark. The benchmark and code will be available in the future.
In-Hand Re-grasp Manipulation with Passive Dynamic Actions via Imitation Learning
Sep 27, 2023Re-grasp manipulation leverages on ergonomic tools to assist humans in accomplishing diverse tasks. In certain scenarios, humans often employ external forces to effortlessly and precisely re-grasp tools like a hammer. Previous development on controllers for in-grasp sliding motion using passive dynamic actions (e.g.,gravity) relies on apprehension of finger-object contact information, and requires customized design for individual objects with varied geometry and weight distribution. It limits their adaptability to diverse objects. In this paper, we propose an end-to-end sliding motion controller based on imitation learning (IL) that necessitates minimal prior knowledge of object mechanics, relying solely on object position information. To expedite training convergence, we utilize a data glove to collect expert data trajectories and train the policy through Generative Adversarial Imitation Learning (GAIL). Simulation results demonstrate the controller's versatility in performing in-hand sliding tasks with objects of varying friction coefficients, geometric shapes, and masses. By migrating to a physical system using visual position estimation, the controller demonstrated an average success rate of 86%, surpassing the baseline algorithm's success rate of 35% of Behavior Cloning(BC) and 20% of Proximal Policy Optimization (PPO).
Eigen component analysis: A quantum theory incorporated machine learning technique to find linearly maximum separable components
Apr 03, 2020
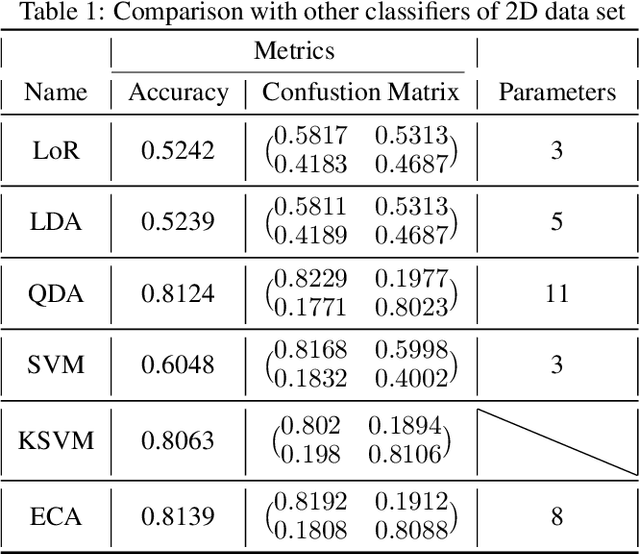
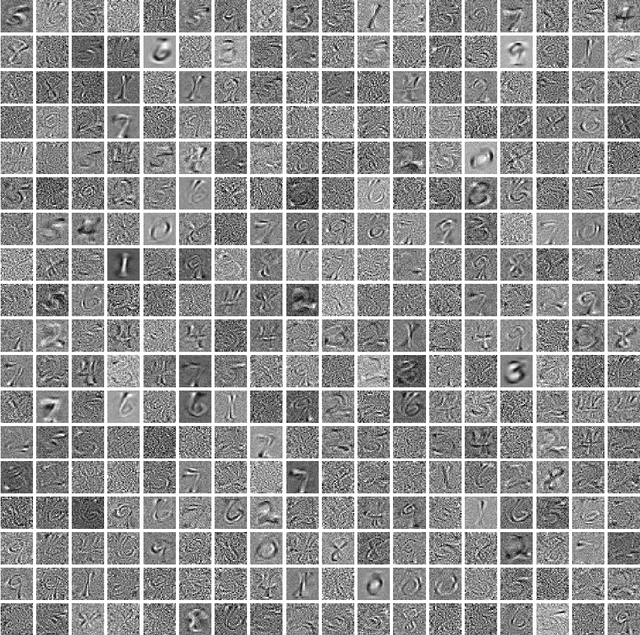
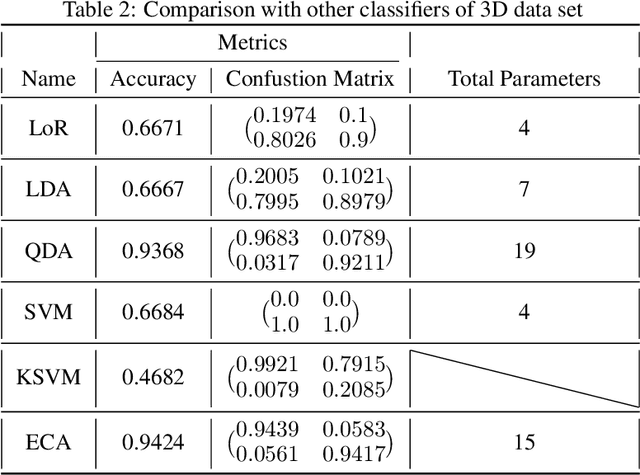
For a linear system, the response to a stimulus is often superposed by its responses to other decomposed stimuli. In quantum mechanics, a state is the superposition of multiple eigenstates. Here, by taking advantage of the phase difference, a common feature as we identified in data sets, we propose eigen component analysis (ECA), an interpretable linear learning model that incorporates the principle of quantum mechanics into the design of algorithm design for feature extraction, classification, dictionary and deep learning, and adversarial generation, etc. The simulation of ECA, possessing a measurable $class\text{-}label$ $\mathcal{H}$, on a classical computer outperforms the existing classical linear models. Eigen component analysis network (ECAN), a network of concatenated ECA models, enhances ECA and gains the potential to be not only integrated with nonlinear models, but also an interface for deep neural networks to implement on a quantum computer, by analogizing a data set as recordings of quantum states. Therefore, ECA and ECAN promise to expand the feasibility of linear learning models, by adopting the strategy of quantum machine learning to replace heavy nonlinear models with succinct linear operations in tackling complexity.