 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Hamiltonian Density Using DeepONet
Feb 27, 2025

In recent years, deep learning for modeling physical phenomena which can be described by partial differential equations (PDEs) have received significant attention. For example, for learning Hamiltonian mechanics, methods based on deep neural networks such as Hamiltonian Neural Networks (HNNs) and their variants have achieved progress. However, existing methods typically depend on the discretization of data, and the determination of required differential operators is often necessary. Instead, in this work, we propose an operator learning approach for modeling wave equations. In particular, we present a method to compute the variational derivatives that are needed to formulate the equations using the automatic differentiation algorithm. The experiments demonstrated that the proposed method is able to learn the operator that defines the Hamiltonian density of waves from data with unspecific discretization without determination of the differential operators.
Tethered Variable Inertial Attitude Control Mechanisms through a Modular Jumping Limbed Robot
Jan 17, 2025



This paper presents the concept of a tethered variable inertial attitude control mechanism for a modular jumping-limbed robot designed for planetary exploration in low-gravity environments. The system, named SPLITTER, comprises two sub-10 kg quadrupedal robots connected by a tether, capable of executing successive jumping gaits and stabilizing in-flight using inertial morphing technology. Through model predictive control (MPC), attitude control was demonstrated by adjusting the limbs and tether length to modulate the system's principal moments of inertia. Our results indicate that this control strategy allows the robot to stabilize during flight phases without needing traditional flywheel-based systems or relying on aerodynamics, making the approach mass-efficient and ideal for small-scale planetary robots' successive jumps. The paper outlines the dynamics, MPC formulation for inertial morphing, actuator requirements, and simulation results, illustrating the potential of agile exploration for small-scale rovers in low-gravity environments like the Moon or asteroids.
Mechanisms and Computational Design of Multi-Modal End-Effector with Force Sensing using Gated Networks
Oct 23, 2024



In limbed robotics, end-effectors must serve dual functions, such as both feet for locomotion and grippers for grasping, which presents design challenges. This paper introduces a multi-modal end-effector capable of transitioning between flat and line foot configurations while providing grasping capabilities. MAGPIE integrates 8-axis force sensing using proposed mechanisms with hall effect sensors, enabling both contact and tactile force measurements. We present a computational design framework for our sensing mechanism that accounts for noise and interference, allowing for desired sensitivity and force ranges and generating ideal inverse models. The hardware implementation of MAGPIE is validated through experiments, demonstrating its capability as a foot and verifying the performance of the sensing mechanisms, ideal models, and gated network-based models.
Cycloidal Quasi-Direct Drive Actuator Designs with Learning-based Torque Estimation for Legged Robotics
Oct 22, 2024



This paper presents a novel approach through the design and implementation of Cycloidal Quasi-Direct Drive actuators for legged robotics. The cycloidal gear mechanism, with its inherent high torque density and mechanical robustness, offers significant advantages over conventional designs. By integrating cycloidal gears into the Quasi-Direct Drive framework, we aim to enhance the performance of legged robots, particularly in tasks demanding high torque and dynamic loads, while still keeping them lightweight. Additionally, we develop a torque estimation framework for the actuator using an Actuator Network, which effectively reduces the sim-to-real gap introduced by the cycloidal drive's complex dynamics. This integration is crucial for capturing the complex dynamics of a cycloidal drive, which contributes to improved learning efficiency, agility, and adaptability for reinforcement learning.
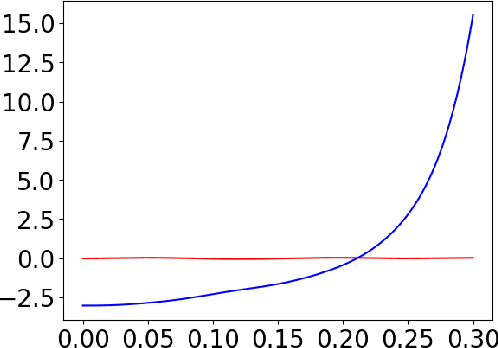
Neural Operators Meet Energy-based Theory: Operator Learning for Hamiltonian and Dissipative PDEs
Feb 14, 2024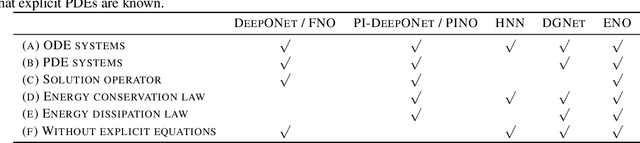

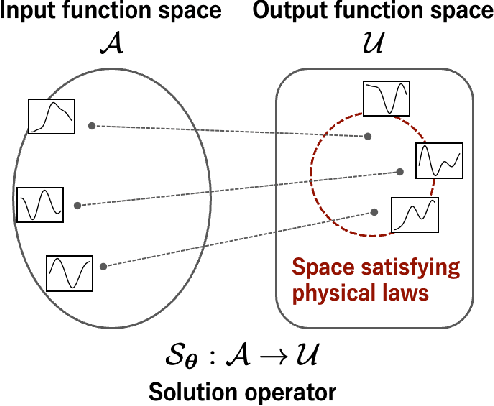
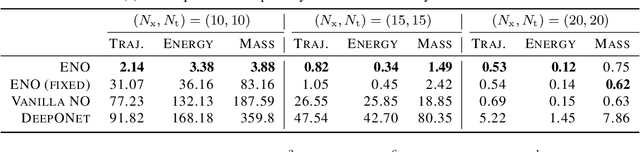
The operator learning has received significant attention in recent years, with the aim of learning a mapping between function spaces. Prior works have proposed deep neural networks (DNNs) for learning such a mapping, enabling the learning of solution operators of partial differential equations (PDEs). However, these works still struggle to learn dynamics that obeys the laws of physics. This paper proposes Energy-consistent Neural Operators (ENOs), a general framework for learning solution operators of PDEs that follows the energy conservation or dissipation law from observed solution trajectories. We introduce a novel penalty function inspired by the energy-based theory of physics for training, in which the energy functional is modeled by another DNN, allowing one to bias the outputs of the DNN-based solution operators to ensure energetic consistency without explicit PDEs. Experiments on multiple physical systems show that ENO outperforms existing DNN models in predicting solutions from data, especially in super-resolution settings.
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Jan 31, 2024State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState
Meta-Learning for Neural Network-based Temporal Point Processes
Jan 29, 2024Human activities generate various event sequences such as taxi trip records, bike-sharing pick-ups, crime occurrence, and infectious disease transmission. The point process is widely used in many applications to predict such events related to human activities. However, point processes present two problems in predicting events related to human activities. First, recent high-performance point process models require the input of sufficient numbers of events collected over a long period (i.e., long sequences) for training, which are often unavailable in realistic situations. Second, the long-term predictions required in real-world applications are difficult. To tackle these problems, we propose a novel meta-learning approach for periodicity-aware prediction of future events given short sequences. The proposed method first embeds short sequences into hidden representations (i.e., task representations) via recurrent neural networks for creating predictions from short sequences. It then models the intensity of the point process by monotonic neural networks (MNNs), with the input being the task representations. We transfer the prior knowledge learned from related tasks and can improve event prediction given short sequences of target tasks. We design the MNNs to explicitly take temporal periodic patterns into account, contributing to improved long-term prediction performance. Experiments on multiple real-world datasets demonstrate that the proposed method has higher prediction performance than existing alternatives.
SCALER: Versatile Multi-Limbed Robot for Free-Climbing in Extreme Terrains
Dec 08, 2023This paper presents SCALER, a versatile free-climbing multi-limbed robot that is designed to achieve tightly coupled simultaneous locomotion and dexterous grasping. Although existing quadruped-limbed robots have shown impressive dexterous skills such as object manipulation, it is essential to balance power-intensive locomotion and dexterous grasping capabilities. We design a torso linkage and a parallel-serial limb to meet such conflicting skills that pose unique challenges in the hardware designs. SCALER employs underactuated two-fingered GOAT grippers that can mechanically adapt and offer 7 modes of grasping, enabling SCALER to traverse extreme terrains with multi-modal grasping strategies. We study the whole-body approach, where SCALER uses its body and limbs to generate additional forces for stable grasping with environments, further enhancing versatility. Furthermore, we improve the GOAT gripper actuation speed to realize more dynamic climbing in a closed-loop control fashion. With these proposed technologies, SCALER can traverse vertical, overhang, upside-down, slippery terrains, and bouldering walls with non-convex-shaped climbing holds under the Earth's gravity.
Meta-learning of Physics-informed Neural Networks for Efficiently Solving Newly Given PDEs
Oct 20, 2023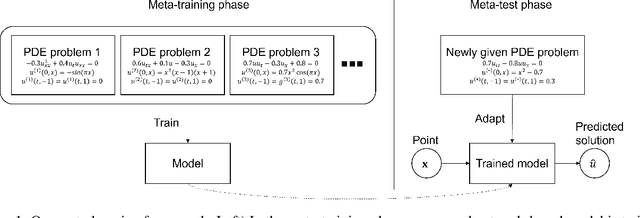
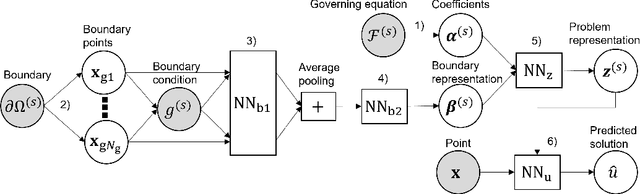
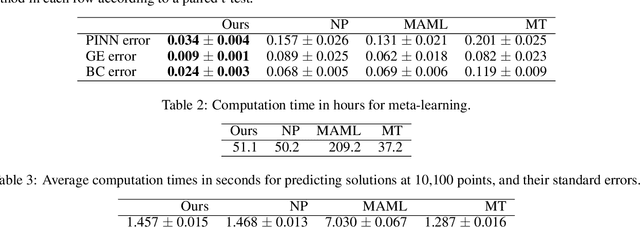
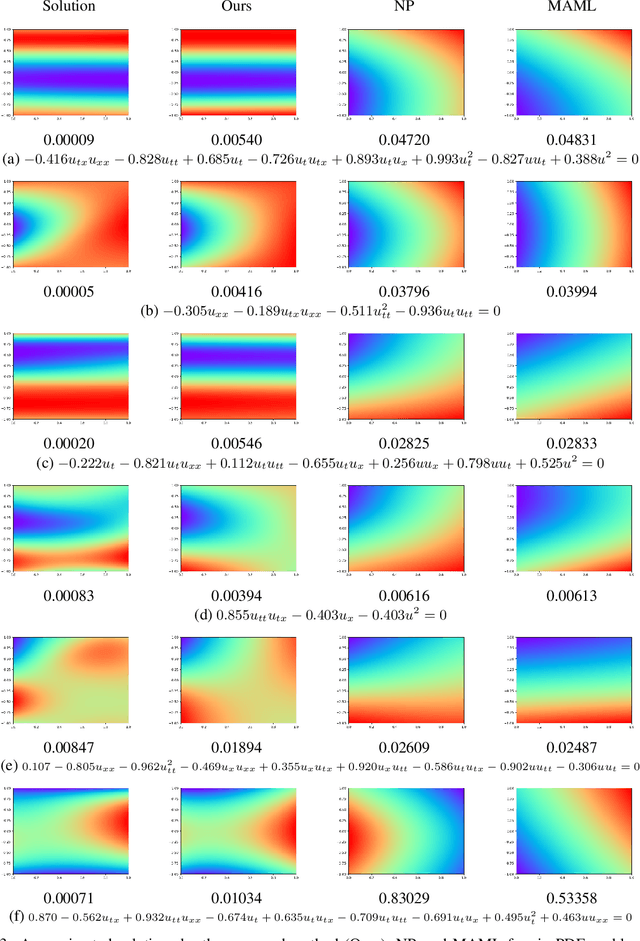
We propose a neural network-based meta-learning method to efficiently solve partial differential equation (PDE) problems. The proposed method is designed to meta-learn how to solve a wide variety of PDE problems, and uses the knowledge for solving newly given PDE problems. We encode a PDE problem into a problem representation using neural networks, where governing equations are represented by coefficients of a polynomial function of partial derivatives, and boundary conditions are represented by a set of point-condition pairs. We use the problem representation as an input of a neural network for predicting solutions, which enables us to efficiently predict problem-specific solutions by the forwarding process of the neural network without updating model parameters. To train our model, we minimize the expected error when adapted to a PDE problem based on the physics-informed neural network framework, by which we can evaluate the error even when solutions are unknown. We demonstrate that our proposed method outperforms existing methods in predicting solutions of PDE problems.
Initialization Bias of Fourier Neural Operator: Revisiting the Edge of Chaos
Oct 10, 2023



This paper investigates the initialization bias of the Fourier neural operator (FNO). A mean-field theory for FNO is established, analyzing the behavior of the random FNO from an ``edge of chaos'' perspective. We uncover that the forward and backward propagation behaviors exhibit characteristics unique to FNO, induced by mode truncation, while also showcasing similarities to those of densely connected networks. Building upon this observation, we also propose a FNO version of the He initialization scheme to mitigate the negative initialization bias leading to training instability. Experimental results demonstrate the effectiveness of our initialization scheme, enabling stable training of a 32-layer FNO without the need for additional techniques or significant performance degradation.