 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNIC: Learning Unified Multimodal Extrinsic Contact Estimation
Jan 07, 2026Contact-rich manipulation requires reliable estimation of extrinsic contacts-the interactions between a grasped object and its environment which provide essential contextual information for planning, control, and policy learning. However, existing approaches often rely on restrictive assumptions, such as predefined contact types, fixed grasp configurations, or camera calibration, that hinder generalization to novel objects and deployment in unstructured environments. In this paper, we present UNIC, a unified multimodal framework for extrinsic contact estimation that operates without any prior knowledge or camera calibration. UNIC directly encodes visual observations in the camera frame and integrates them with proprioceptive and tactile modalities in a fully data-driven manner. It introduces a unified contact representation based on scene affordance maps that captures diverse contact formations and employs a multimodal fusion mechanism with random masking, enabling robust multimodal representation learning. Extensive experiments demonstrate that UNIC performs reliably. It achieves a 9.6 mm average Chamfer distance error on unseen contact locations, performs well on unseen objects, remains robust under missing modalities, and adapts to dynamic camera viewpoints. These results establish extrinsic contact estimation as a practical and versatile capability for contact-rich manipulation.
Analytic Conditions for Differentiable Collision Detection in Trajectory Optimization
Sep 30, 2025Optimization-based methods are widely used for computing fast, diverse solutions for complex tasks such as collision-free movement or planning in the presence of contacts. However, most of these methods require enforcing non-penetration constraints between objects, resulting in a non-trivial and computationally expensive problem. This makes the use of optimization-based methods for planning and control challenging. In this paper, we present a method to efficiently enforce non-penetration of sets while performing optimization over their configuration, which is directly applicable to problems like collision-aware trajectory optimization. We introduce novel differentiable conditions with analytic expressions to achieve this. To enforce non-collision between non-smooth bodies using these conditions, we introduce a method to approximate polytopes as smooth semi-algebraic sets. We present several numerical experiments to demonstrate the performance of the proposed method and compare the performance with other baseline methods recently proposed in the literature.
Hierarchical Contact-Rich Trajectory Optimization for Multi-Modal Manipulation using Tight Convex Relaxations
Mar 11, 2025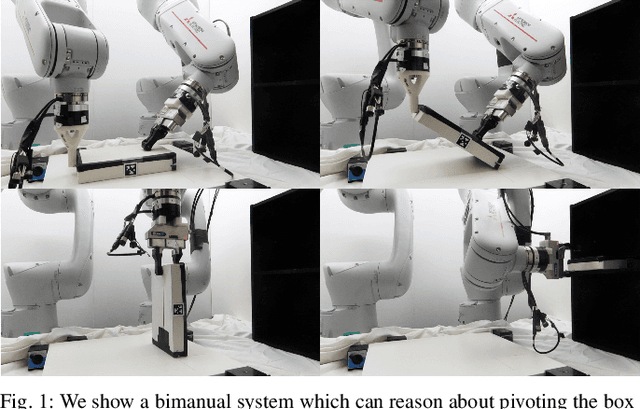
Designing trajectories for manipulation through contact is challenging as it requires reasoning of object \& robot trajectories as well as complex contact sequences simultaneously. In this paper, we present a novel framework for simultaneously designing trajectories of robots, objects, and contacts efficiently for contact-rich manipulation. We propose a hierarchical optimization framework where Mixed-Integer Linear Program (MILP) selects optimal contacts between robot \& object using approximate dynamical constraints, and then a NonLinear Program (NLP) optimizes trajectory of the robot(s) and object considering full nonlinear constraints. We present a convex relaxation of bilinear constraints using binary encoding technique such that MILP can provide tighter solutions with better computational complexity. The proposed framework is evaluated on various manipulation tasks where it can reason about complex multi-contact interactions while providing computational advantages. We also demonstrate our framework in hardware experiments using a bimanual robot system.
Is Linear Feedback on Smoothed Dynamics Sufficient for Stabilizing Contact-Rich Plans?
Nov 14, 2024



Designing planners and controllers for contact-rich manipulation is extremely challenging as contact violates the smoothness conditions that many gradient-based controller synthesis tools assume. Contact smoothing approximates a non-smooth system with a smooth one, allowing one to use these synthesis tools more effectively. However, applying classical control synthesis methods to smoothed contact dynamics remains relatively under-explored. This paper analyzes the efficacy of linear controller synthesis using differential simulators based on contact smoothing. We introduce natural baselines for leveraging contact smoothing to compute (a) open-loop plans robust to uncertain conditions and/or dynamics, and (b) feedback gains to stabilize around open-loop plans. Using robotic bimanual whole-body manipulation as a testbed, we perform extensive empirical experiments on over 300 trajectories and analyze why LQR seems insufficient for stabilizing contact-rich plans. The video summarizing this paper and hardware experiments is found here: https://youtu.be/HLaKi6qbwQg?si=_zCAmBBD6rGSitm9.
SCALER: Versatile Multi-Limbed Robot for Free-Climbing in Extreme Terrains
Dec 08, 2023This paper presents SCALER, a versatile free-climbing multi-limbed robot that is designed to achieve tightly coupled simultaneous locomotion and dexterous grasping. Although existing quadruped-limbed robots have shown impressive dexterous skills such as object manipulation, it is essential to balance power-intensive locomotion and dexterous grasping capabilities. We design a torso linkage and a parallel-serial limb to meet such conflicting skills that pose unique challenges in the hardware designs. SCALER employs underactuated two-fingered GOAT grippers that can mechanically adapt and offer 7 modes of grasping, enabling SCALER to traverse extreme terrains with multi-modal grasping strategies. We study the whole-body approach, where SCALER uses its body and limbs to generate additional forces for stable grasping with environments, further enhancing versatility. Furthermore, we improve the GOAT gripper actuation speed to realize more dynamic climbing in a closed-loop control fashion. With these proposed technologies, SCALER can traverse vertical, overhang, upside-down, slippery terrains, and bouldering walls with non-convex-shaped climbing holds under the Earth's gravity.
Covariance Steering for Uncertain Contact-rich Systems
Mar 23, 2023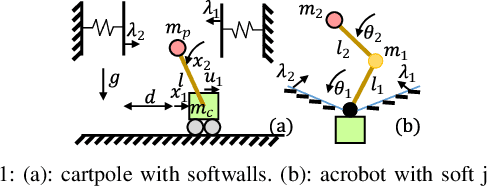
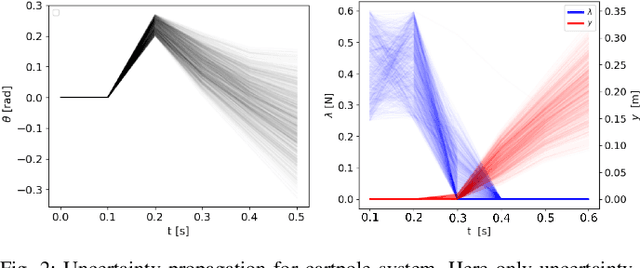
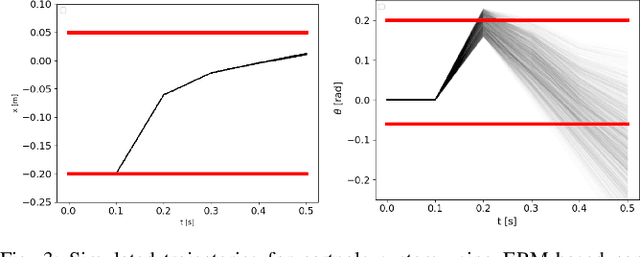
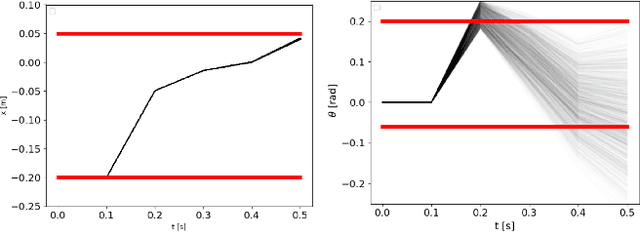
Planning and control for uncertain contact systems is challenging as it is not clear how to propagate uncertainty for planning. Contact-rich tasks can be modeled efficiently using complementarity constraints among other techniques. In this paper, we present a stochastic optimization technique with chance constraints for systems with stochastic complementarity constraints. We use a particle filter-based approach to propagate moments for stochastic complementarity system. To circumvent the issues of open-loop chance constrained planning, we propose a contact-aware controller for covariance steering of the complementarity system. Our optimization problem is formulated as Non-Linear Programming (NLP) using bilevel optimization. We present an important-particle algorithm for numerical efficiency for the underlying control problem. We verify that our contact-aware closed-loop controller is able to steer the covariance of the states under stochastic contact-rich tasks.
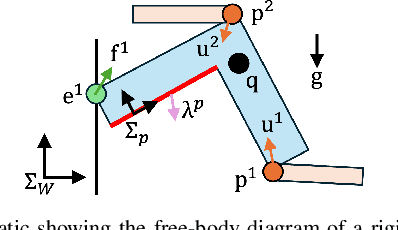
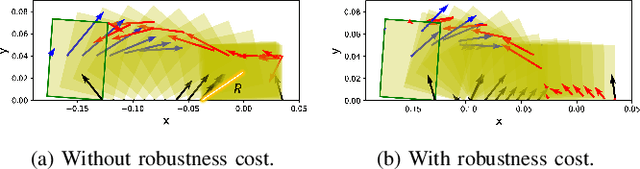
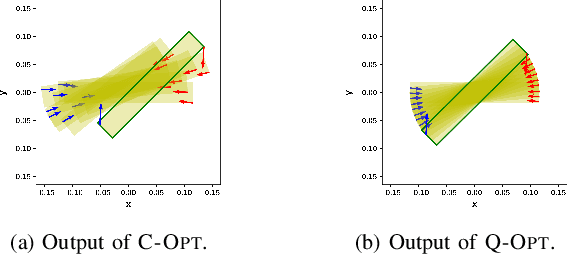
Robust Pivoting Manipulation using Contact Implicit Bilevel Optimization
Mar 15, 2023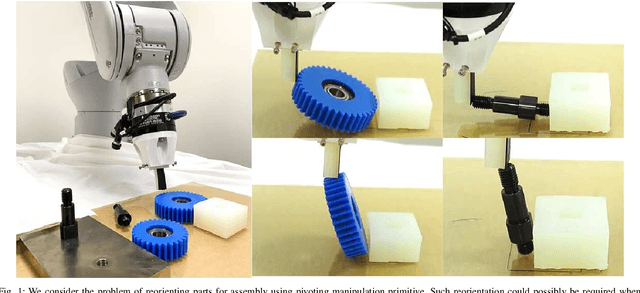
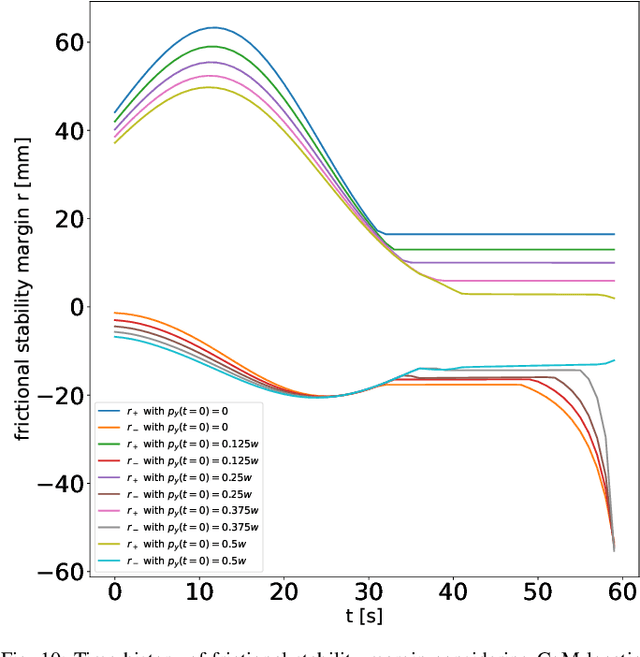
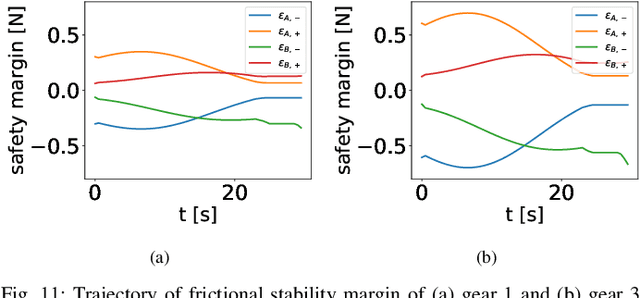
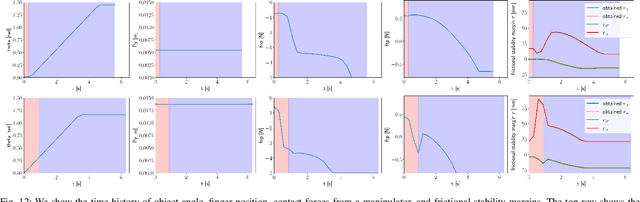
Generalizable manipulation requires that robots be able to interact with novel objects and environment. This requirement makes manipulation extremely challenging as a robot has to reason about complex frictional interactions with uncertainty in physical properties of the object and the environment. In this paper, we study robust optimization for planning of pivoting manipulation in the presence of uncertainties. We present insights about how friction can be exploited to compensate for inaccuracies in the estimates of the physical properties during manipulation. Under certain assumptions, we derive analytical expressions for stability margin provided by friction during pivoting manipulation. This margin is then used in a Contact Implicit Bilevel Optimization (CIBO) framework to optimize a trajectory that maximizes this stability margin to provide robustness against uncertainty in several physical parameters of the object. We present analysis of the stability margin with respect to several parameters involved in the underlying bilevel optimization problem. We demonstrate our proposed method using a 6 DoF manipulator for manipulating several different objects.
Tactile Tool Manipulation
Jan 17, 2023Humans can effortlessly perform very complex, dexterous manipulation tasks by reacting to sensor observations. In contrast, robots can not perform reactive manipulation and they mostly operate in open-loop while interacting with their environment. Consequently, the current manipulation algorithms either are inefficient in performance or can only work in highly structured environments. In this paper, we present closed-loop control of a complex manipulation task where a robot uses a tool to interact with objects. Manipulation using a tool leads to complex kinematics and contact constraints that need to be satisfied for generating feasible manipulation trajectories. We first present an open-loop controller design using Non-Linear Programming (NLP) that satisfies these constraints. In order to design a closed-loop controller, we present a pose estimator of objects and tools using tactile sensors. Using our tactile estimator, we design a closed-loop controller based on Model Predictive Control (MPC). The proposed algorithm is verified using a 6 DoF manipulator on tasks using a variety of objects and tools. We verify that our closed-loop controller can successfully perform tool manipulation under several unexpected contacts. Video summarizing this work and hardware experiments are found https://youtu.be/VsClK04qDhk.
Multi-Modal Multi-Agent Optimization for LIMMS, A Modular Robotics Approach to Delivery Automation
Jul 31, 2022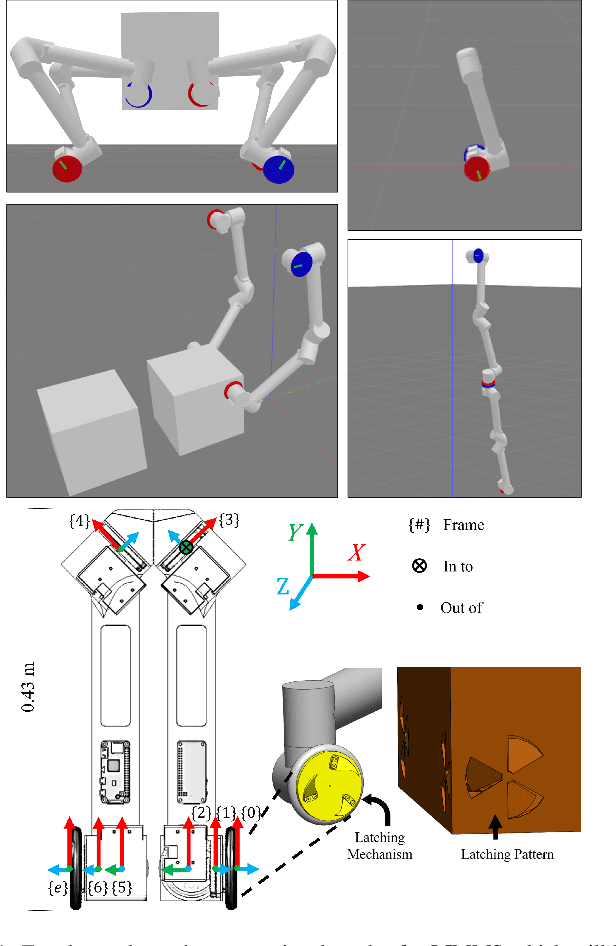
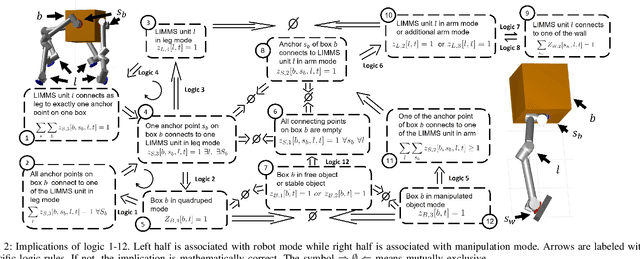
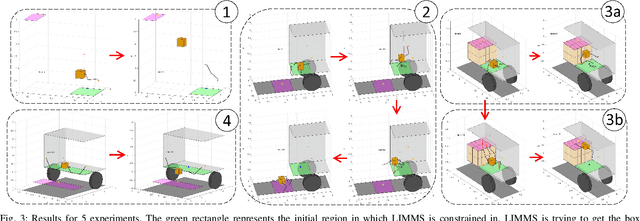
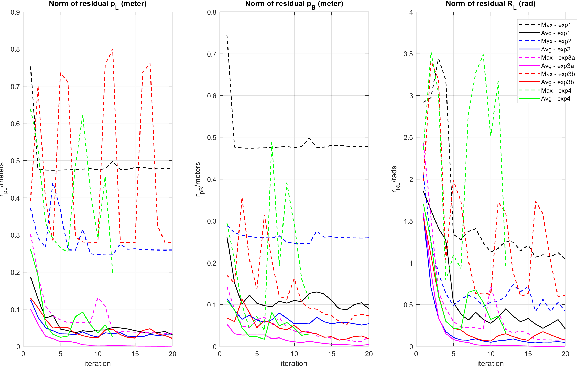
In this paper we present a motion planner for LIMMS, a modular multi-agent, multi-modal package delivery platform. A single LIMMS unit is a robot that can operate as an arm or leg depending on how and what it is attached to, e.g., a manipulator when it is anchored to walls within a delivery vehicle or a quadruped robot when 4 are attached to a box. Coordinating amongst multiple LIMMS, when each one can take on vastly different roles, can quickly become complex. For such a planning problem we first compose the necessary logic and constraints. The formulation is then solved for skill exploration and can be implemented on hardware after refinement. To solve this optimization problem we use alternating direction method of multipliers (ADMM). The proposed planner is experimented under various scenarios which shows the capability of LIMMS to enter into different modes or combinations of them to achieve their goal of moving shipping boxes.
Auto-Calibrating Admittance Controller for Robust Motion of Robotic Systems
Jul 06, 2022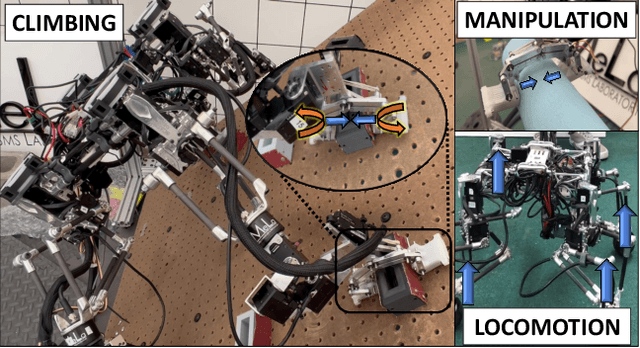
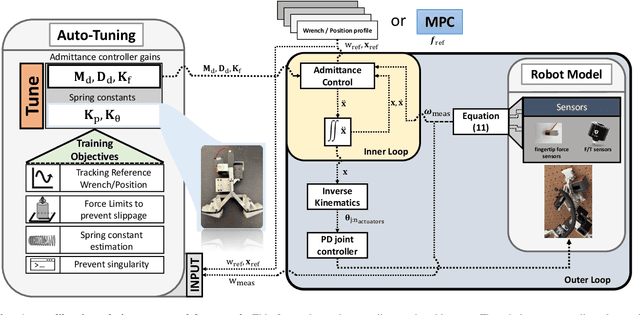
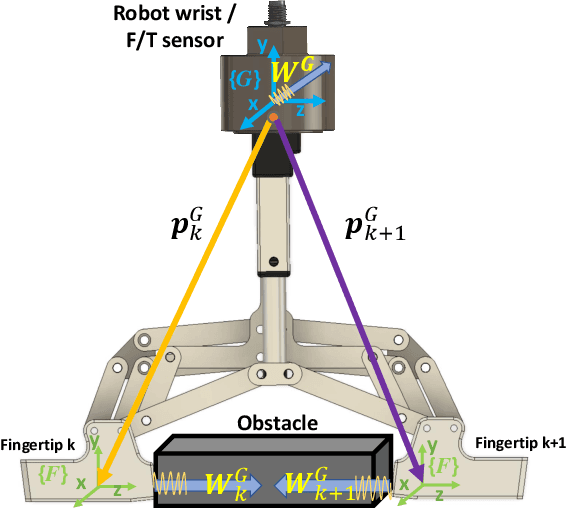
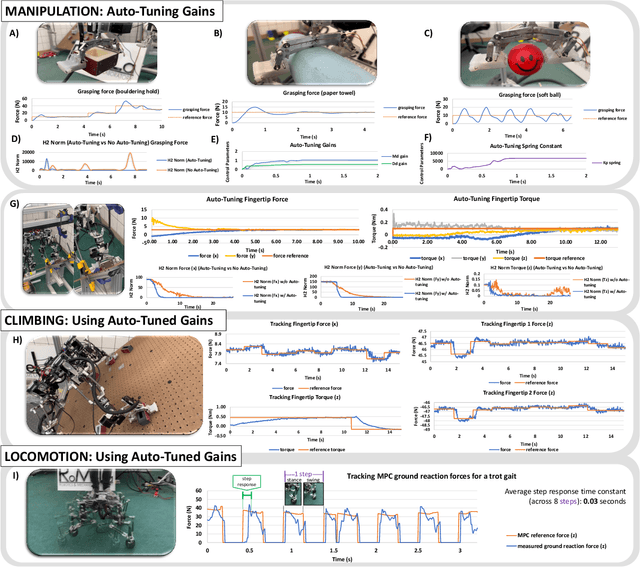
We demonstrate an admittance controller with auto-tuning that can be applied for single and multi-point contact robots (e.g., legged robots with point feet or multi-finger grippers). The controller's objective is to track wrench profiles of each contact point while considering the additional torque due to rotational friction. Our admittance controller is adaptive during online operation by using an auto-tuning method that tunes the gains of the controller while following several training objectives that facilitate controller stability, such as tracking the wrench profile as closely as possible, ensuring control outputs that are within force limits that minimize slippage, and avoids kinematic singularity. We demonstrate the robustness of our controller on hardware for both manipulation and locomotion tasks using a multi-limbed climbing robot.