 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSCALER: A Tough Versatile Quadruped Free-Climber Robot
Jul 04, 2022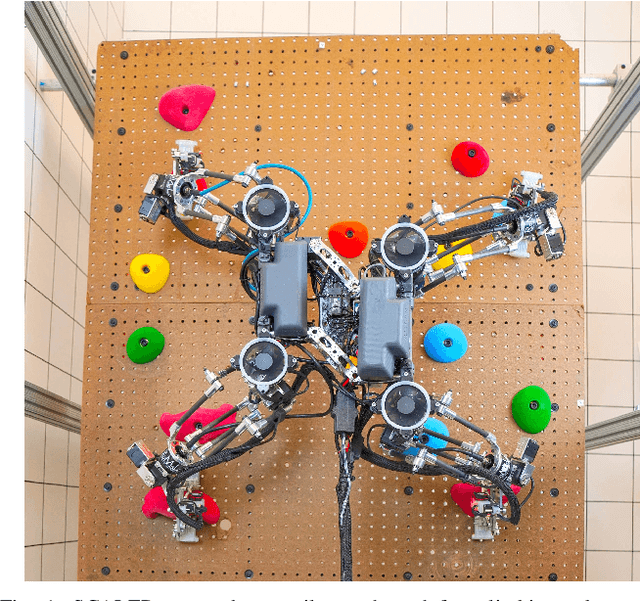
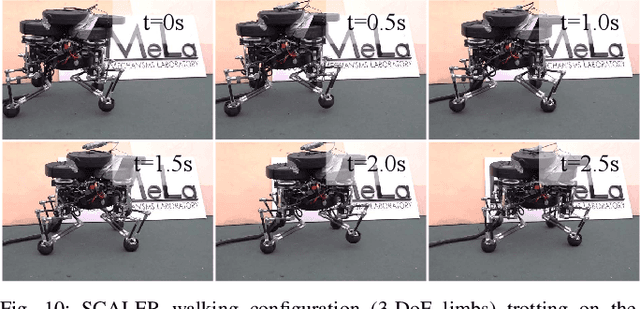
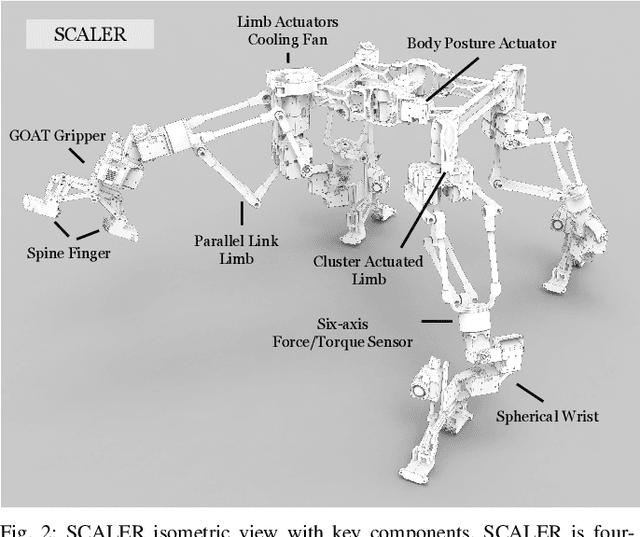
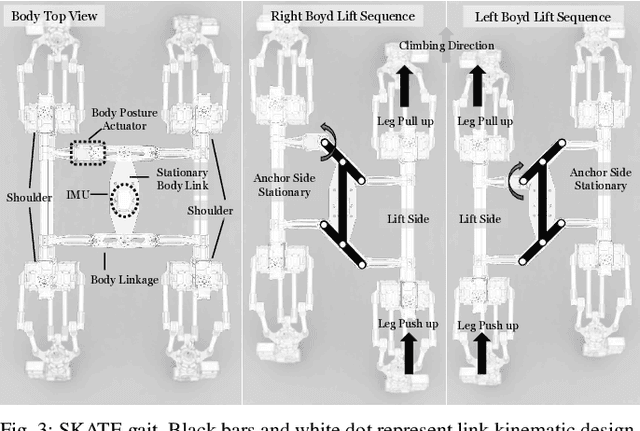
This paper introduces SCALER, a quadrupedal robot that demonstrates climbing on bouldering walls, overhangs, and ceilings and trotting on the ground. SCALER is one of the first high-degrees of freedom four-limbed robots that can free-climb under the Earth's gravity and one of the most mechanically efficient quadrupeds on the ground. Where other state-of-the-art climbers are specialized in climbing itself, SCALER promises practical free-climbing with payload \textit{and} ground locomotion, which realizes true versatile mobility. A new climbing gait, SKATE gait, increases the payload by utilizing the SCALER body linkage mechanism. SCALER achieves a maximum normalized locomotion speed of $1.87$ /s, or $0.56$ m/s on the ground and $1.2$ /min, or $0.42$ m/min in bouldering wall climbing. Payload capacity reaches $233$ % of the SCALER weight on the ground and $35$ % on the vertical wall. Our GOAT gripper, a mechanically adaptable underactuated two-finger gripper, successfully grasps convex and non-convex objects and supports SCALER.