 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Contact-Rich Grasping and Locomotion via Distributed Optimization Enabling Free-Climbing for Multi-Limbed Robots
Jul 05, 2022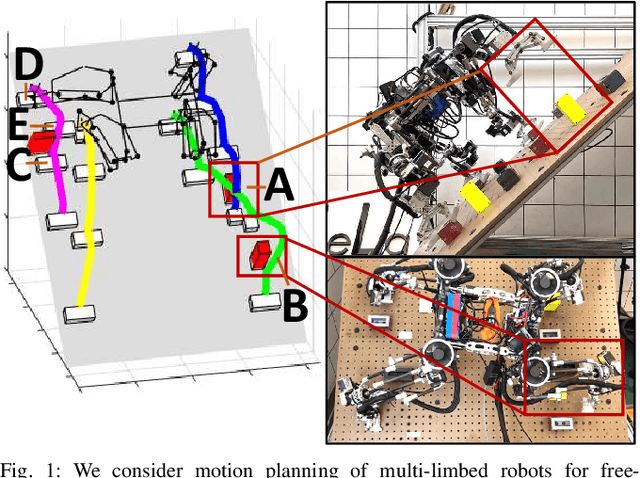
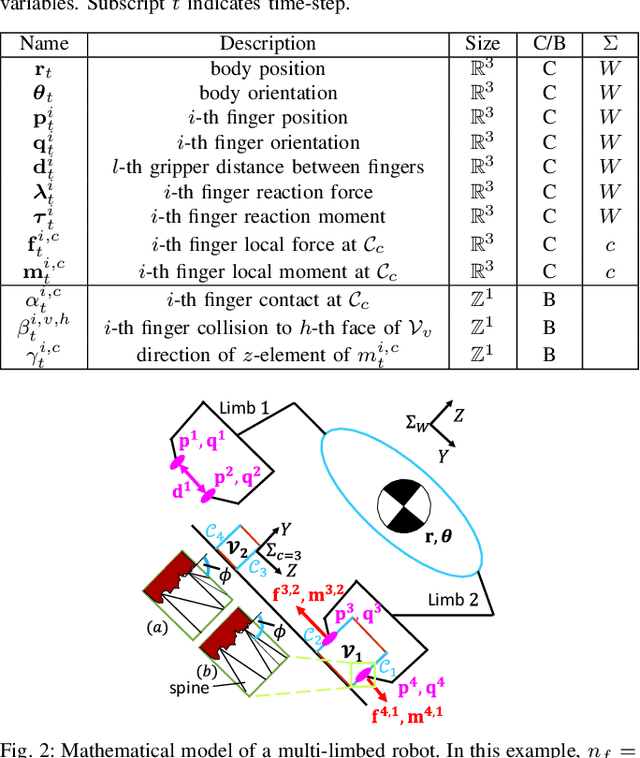
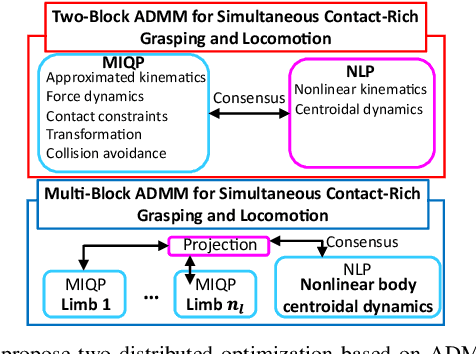
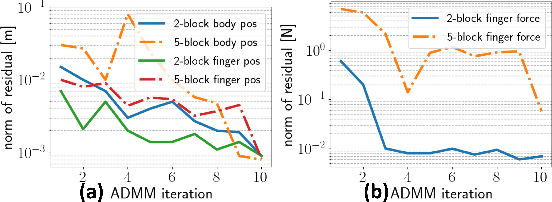
While motion planning of locomotion for legged robots has shown great success, motion planning for legged robots with dexterous multi-finger grasping is not mature yet. We present an efficient motion planning framework for simultaneously solving locomotion (e.g., centroidal dynamics), grasping (e.g., patch contact), and contact (e.g., gait) problems. To accelerate the planning process, we propose distributed optimization frameworks based on Alternating Direction Methods of Multipliers (ADMM) to solve the original large-scale Mixed-Integer NonLinear Programming (MINLP). The resulting frameworks use Mixed-Integer Quadratic Programming (MIQP) to solve contact and NonLinear Programming (NLP) to solve nonlinear dynamics, which are more computationally tractable and less sensitive to parameters. Also, we explicitly enforce patch contact constraints from limit surfaces with micro-spine grippers. We demonstrate our proposed framework in the hardware experiments, showing that the multi-limbed robot is able to realize various motions including free-climbing at a slope angle 45{\deg} with a much shorter planning time.
SCALER: A Tough Versatile Quadruped Free-Climber Robot
Jul 04, 2022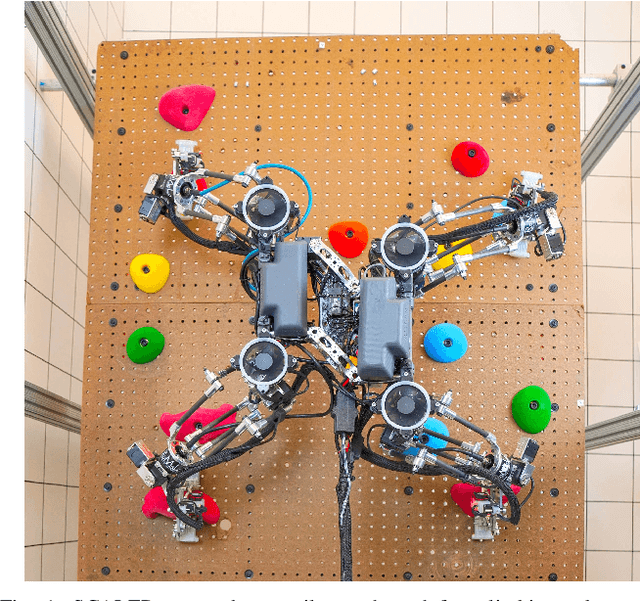
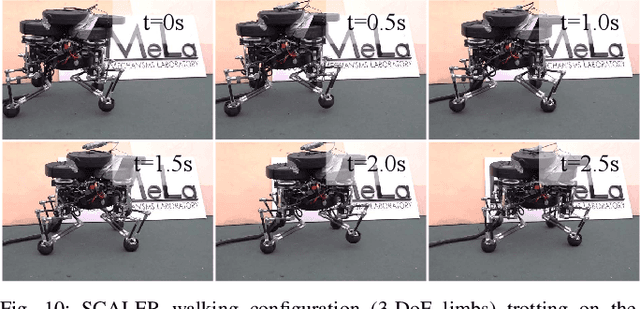
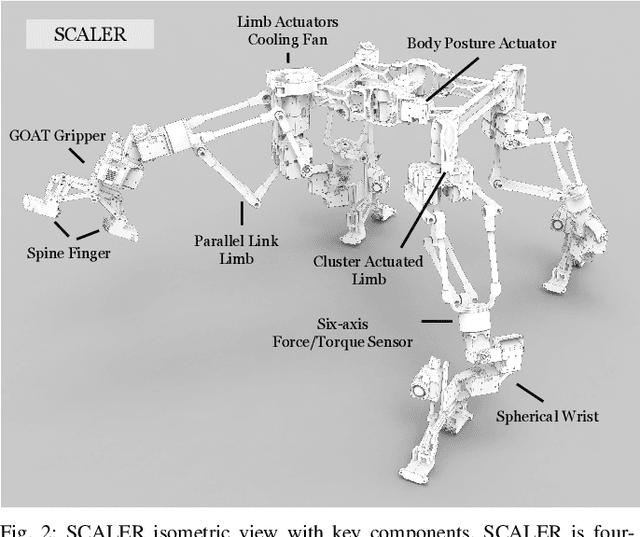
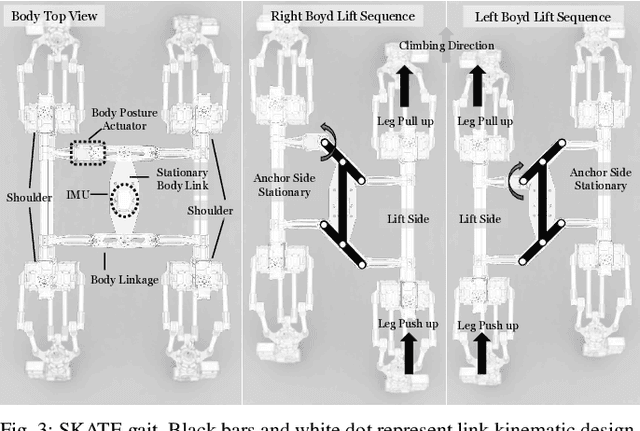
This paper introduces SCALER, a quadrupedal robot that demonstrates climbing on bouldering walls, overhangs, and ceilings and trotting on the ground. SCALER is one of the first high-degrees of freedom four-limbed robots that can free-climb under the Earth's gravity and one of the most mechanically efficient quadrupeds on the ground. Where other state-of-the-art climbers are specialized in climbing itself, SCALER promises practical free-climbing with payload \textit{and} ground locomotion, which realizes true versatile mobility. A new climbing gait, SKATE gait, increases the payload by utilizing the SCALER body linkage mechanism. SCALER achieves a maximum normalized locomotion speed of $1.87$ /s, or $0.56$ m/s on the ground and $1.2$ /min, or $0.42$ m/min in bouldering wall climbing. Payload capacity reaches $233$ % of the SCALER weight on the ground and $35$ % on the vertical wall. Our GOAT gripper, a mechanically adaptable underactuated two-finger gripper, successfully grasps convex and non-convex objects and supports SCALER.