 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid co-design of Buoyancy-assisted robots for Challenging Locomotion using Gaussian Evolutionary Specialists
Jun 05, 2026Designing high-performance legged robots requires jointly optimizing morphology and control. Model-free Reinforcement Learning (RL) offers an alternative to model-predictive control for developing robust controllers without explicitly specifying robot dynamics. Thus, we have seen theuse of RL to train controllers and evaluate designs for robot morphology optimization. While RL has shown success inlocomotion, using it in the co-design inner loop is expensive due to repeated policy training. Universal policies conditioned on morphology offer a promising alternative, but suffer from behavioral diversity collapse, converging to a single strategy that performs sub-optimally across designs. On the other hand, end-to-end Mixture-of-Experts (MoE) architectures fail due to a collapse in its representation. We propose Gaussian Evolutionary Specialists (GES), a framework that decouples design-space partitioning from policy learning to capture diverse behaviors explicitly. GES assigns specialist policies to evolving Gaussian regions and iteratively refines them via training, probing, and territory expansion. The resulting specialists are integrated into a design sampling loop, replacing costly re-training with direct evaluation. When tested on the Buoyancy-Assisted Light Legged Unit (BALLU), GES discovers designs with 5 - 25% higher performance than naive universal policies. On hardware, a GES optimized design overcomes a 24 cm tall obstacle - 3x improvement over the baseline BALLU design. Moreover, GES curtails design optimization time by 37%.
Adapt as You Say: Online Interactive Bimanual Skill Adaptation via Human Language Feedback
Mar 27, 2026Developing general-purpose robots capable of autonomously operating in human living environments requires the ability to adapt to continuously evolving task conditions. However, adapting high-dimensional coordinated bimanual skills to novel task variations at deployment remains a fundamental challenge. In this work, we present BiSAIL (Bimanual Skill Adaptation via Interactive Language), a novel framework that enables zero-shot online adaptation of offline-learned bimanual skills through interactive language feedback. The key idea of BiSAIL is to adopt a hierarchical reason-then-modulate paradigm, which first infers generalized adaptation objectives from multimodal task variations, and then adapts bimanual motions via diffusion modulation to achieve the inferred objectives. Extensive real-robot experiments across six bimanual tasks and two dual-arm platforms demonstrate that BiSAIL significantly outperforms existing methods in human-in-the-loop adaptability, task generalization and cross-embodiment scalability. This work enables the development of adaptive bimanual assistants that can be flexibly customized by non-expert users via intuitive verbal corrections. Experimental videos and code are available at https://rip4kobe.github.io/BiSAIL/.
MiNI-Q: A Miniature, Wire-Free Quadruped with Unbounded, Independently Actuated Leg Joints
Mar 12, 2026Physical joint limits are common in legged robots and can restrict workspace, constrain gait design, and increase the risk of hardware damage. This paper introduces MiNI-Q^2, a miniature, wire-free quadruped robot with independently actuated, mechanically unbounded 2-DOF leg joints. We present the mechanical design, kinematic analysis, and experimental validation of the proposed robot. The leg mechanism enables both oscillatory gaits and rotary locomotion while allowing the robot to fold to a minimum height of 2.5 cm. Experimentally, MiNI-Q achieves speeds up to 0.46 m/s and demonstrates low-clearance crawling, stair climbing, inverted locomotion, jumping, and backflipping. The wire-free architecture extends our previous Q8bot design, improving assembly reliability at miniature scale. All mechanical and electrical design files are released open source to support reproducibility and further research.
Latent Adaptive Planner for Dynamic Manipulation
May 06, 2025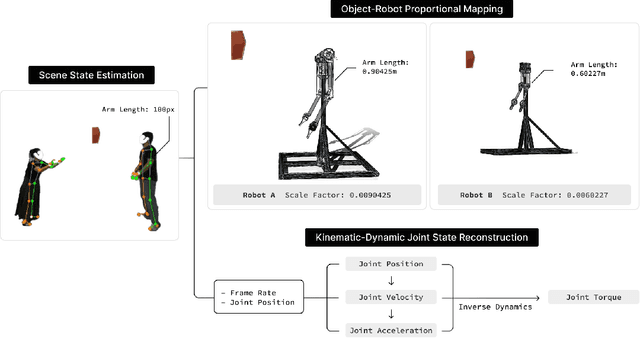
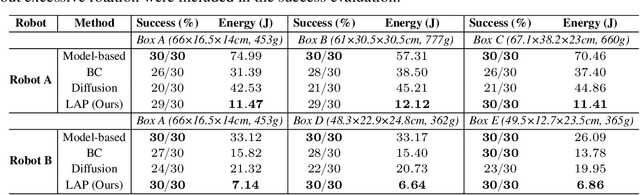
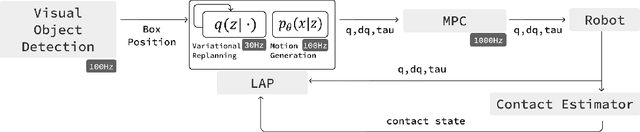
This paper presents Latent Adaptive Planner (LAP), a novel approach for dynamic nonprehensile manipulation tasks that formulates planning as latent space inference, effectively learned from human demonstration videos. Our method addresses key challenges in visuomotor policy learning through a principled variational replanning framework that maintains temporal consistency while efficiently adapting to environmental changes. LAP employs Bayesian updating in latent space to incrementally refine plans as new observations become available, striking an optimal balance between computational efficiency and real-time adaptability. We bridge the embodiment gap between humans and robots through model-based proportional mapping that regenerates accurate kinematic-dynamic joint states and object positions from human demonstrations. Experimental evaluations across multiple complex manipulation benchmarks demonstrate that LAP achieves state-of-the-art performance, outperforming existing approaches in success rate, trajectory smoothness, and energy efficiency, particularly in dynamic adaptation scenarios. Our approach enables robots to perform complex interactions with human-like adaptability while providing an expandable framework applicable to diverse robotic platforms using the same human demonstration videos.
Tethered Variable Inertial Attitude Control Mechanisms through a Modular Jumping Limbed Robot
Jan 17, 2025



This paper presents the concept of a tethered variable inertial attitude control mechanism for a modular jumping-limbed robot designed for planetary exploration in low-gravity environments. The system, named SPLITTER, comprises two sub-10 kg quadrupedal robots connected by a tether, capable of executing successive jumping gaits and stabilizing in-flight using inertial morphing technology. Through model predictive control (MPC), attitude control was demonstrated by adjusting the limbs and tether length to modulate the system's principal moments of inertia. Our results indicate that this control strategy allows the robot to stabilize during flight phases without needing traditional flywheel-based systems or relying on aerodynamics, making the approach mass-efficient and ideal for small-scale planetary robots' successive jumps. The paper outlines the dynamics, MPC formulation for inertial morphing, actuator requirements, and simulation results, illustrating the potential of agile exploration for small-scale rovers in low-gravity environments like the Moon or asteroids.
Mechanisms and Computational Design of Multi-Modal End-Effector with Force Sensing using Gated Networks
Oct 23, 2024



In limbed robotics, end-effectors must serve dual functions, such as both feet for locomotion and grippers for grasping, which presents design challenges. This paper introduces a multi-modal end-effector capable of transitioning between flat and line foot configurations while providing grasping capabilities. MAGPIE integrates 8-axis force sensing using proposed mechanisms with hall effect sensors, enabling both contact and tactile force measurements. We present a computational design framework for our sensing mechanism that accounts for noise and interference, allowing for desired sensitivity and force ranges and generating ideal inverse models. The hardware implementation of MAGPIE is validated through experiments, demonstrating its capability as a foot and verifying the performance of the sensing mechanisms, ideal models, and gated network-based models.
Cycloidal Quasi-Direct Drive Actuator Designs with Learning-based Torque Estimation for Legged Robotics
Oct 22, 2024



This paper presents a novel approach through the design and implementation of Cycloidal Quasi-Direct Drive actuators for legged robotics. The cycloidal gear mechanism, with its inherent high torque density and mechanical robustness, offers significant advantages over conventional designs. By integrating cycloidal gears into the Quasi-Direct Drive framework, we aim to enhance the performance of legged robots, particularly in tasks demanding high torque and dynamic loads, while still keeping them lightweight. Additionally, we develop a torque estimation framework for the actuator using an Actuator Network, which effectively reduces the sim-to-real gap introduced by the cycloidal drive's complex dynamics. This integration is crucial for capturing the complex dynamics of a cycloidal drive, which contributes to improved learning efficiency, agility, and adaptability for reinforcement learning.
Evaluating Data-driven Performances of Mixed Integer Bilinear Formulations for Book Placement Planning
Jun 07, 2024Mixed integer bilinear programs (MIBLPs) offer tools to resolve robotics motion planning problems with orthogonal rotation matrices or static moment balance, but require long solving times. Recent work utilizing data-driven methods has shown potential to overcome this issue allowing for applications on larger scale problems. To solve mixed-integer bilinear programs online with data-driven methods, several re-formulations exist including mathematical programming with complementary constraints (MPCC), and mixed-integer programming (MIP). In this work, we compare the data-driven performances of various MIBLP reformulations using a book placement problem that has discrete configuration switches and bilinear constraints. The success rate, cost, and solving time are compared along with non-data-driven methods. Our results demonstrate the advantage of using data-driven methods to accelerate the solving speed of MIBLPs, and provide references for users to choose the suitable re-formulation.
YORI: Autonomous Cooking System Utilizing a Modular Robotic Kitchen and a Dual-Arm Proprioceptive Manipulator
May 17, 2024
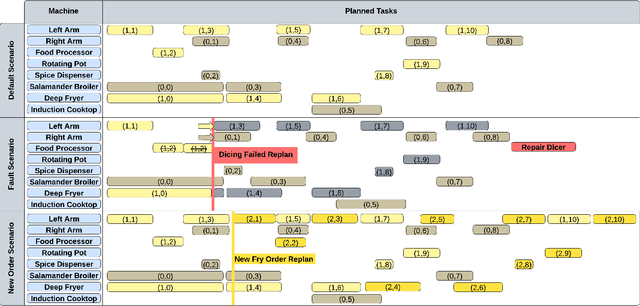
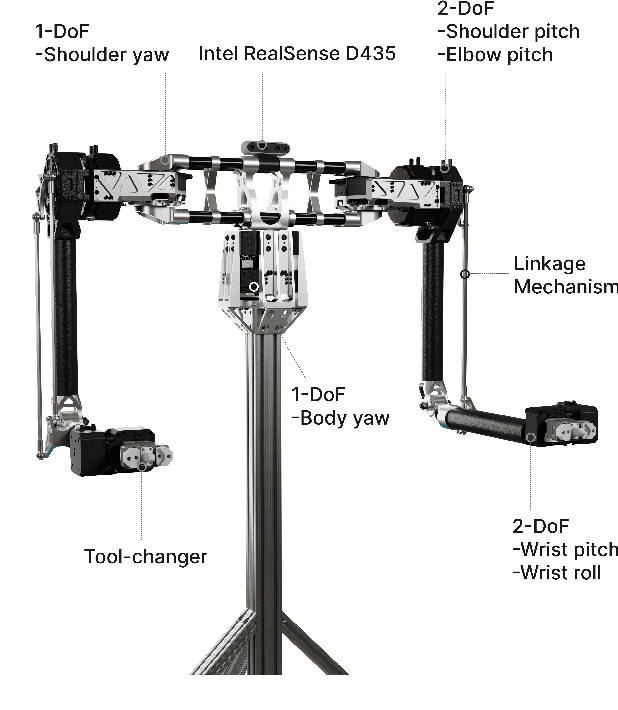
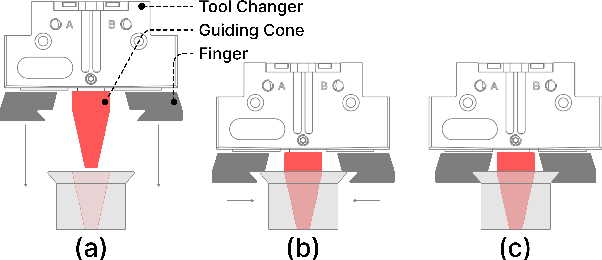
This article introduces the development and implementation of the Yummy Operations Robot Initiative (YORI), an innovative, autonomous robotic cooking system. YORI marks a major advancement in culinary automation, adept at handling a diverse range of cooking tasks, capable of preparing multiple dishes simultaneously, and offering the flexibility to adapt to an extensive array of culinary activities. This versatility is achieved through the use of custom tools and appliances operated by a dual arm manipulator utilizing proprioceptive actuators. The use of proprioceptive actuators enables fast yet precise movements, while allowing for accurate force control and effectively mitigating the inevitable impacts encountered in cooking. These factors underscore this technology's boundless potential. A key to YORI's adaptability is its modular kitchen design, which allows for easy adaptations to accommodate a continuously increasing range of culinary tasks. This article provides a comprehensive look at YORI's design process, and highlights its role in revolutionizing the culinary world by enhancing efficiency, consistency, and versatility in food preparation.
OptiState: State Estimation of Legged Robots using Gated Networks with Transformer-based Vision and Kalman Filtering
Jan 31, 2024State estimation for legged robots is challenging due to their highly dynamic motion and limitations imposed by sensor accuracy. By integrating Kalman filtering, optimization, and learning-based modalities, we propose a hybrid solution that combines proprioception and exteroceptive information for estimating the state of the robot's trunk. Leveraging joint encoder and IMU measurements, our Kalman filter is enhanced through a single-rigid body model that incorporates ground reaction force control outputs from convex Model Predictive Control optimization. The estimation is further refined through Gated Recurrent Units, which also considers semantic insights and robot height from a Vision Transformer autoencoder applied on depth images. This framework not only furnishes accurate robot state estimates, including uncertainty evaluations, but can minimize the nonlinear errors that arise from sensor measurements and model simplifications through learning. The proposed methodology is evaluated in hardware using a quadruped robot on various terrains, yielding a 65% improvement on the Root Mean Squared Error compared to our VIO SLAM baseline. Code example: https://github.com/AlexS28/OptiState