 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical, Model-Based System for High-Performance Humanoid Soccer
Dec 10, 2025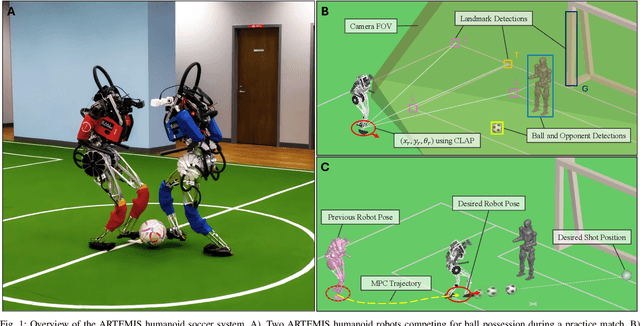
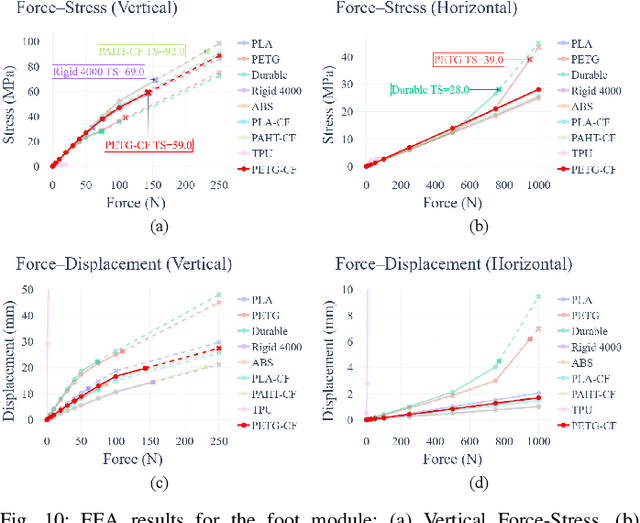
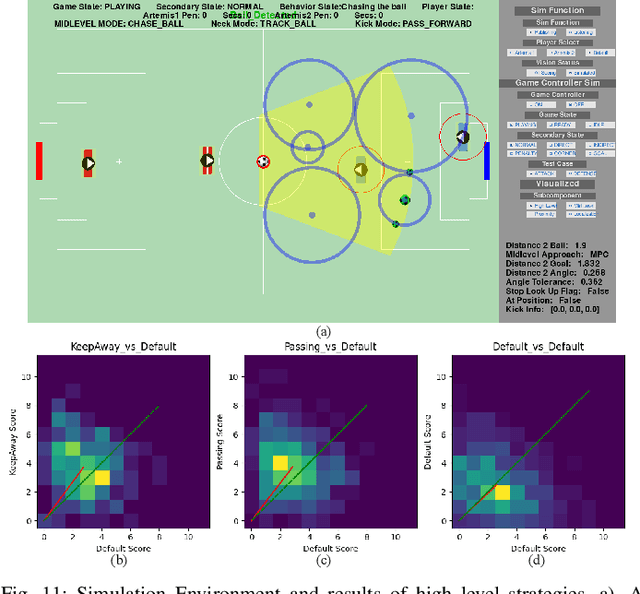
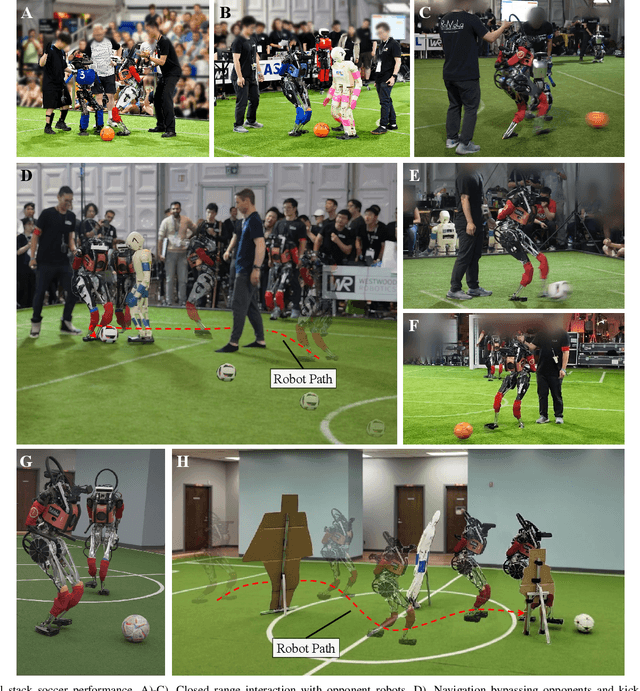
The development of athletic humanoid robots has gained significant attention as advances in actuation, sensing, and control enable increasingly dynamic, real-world capabilities. RoboCup, an international competition of fully autonomous humanoid robots, provides a uniquely challenging benchmark for such systems, culminating in the long-term goal of competing against human soccer players by 2050. This paper presents the hardware and software innovations underlying our team's victory in the RoboCup 2024 Adult-Sized Humanoid Soccer Competition. On the hardware side, we introduce an adult-sized humanoid platform built with lightweight structural components, high-torque quasi-direct-drive actuators, and a specialized foot design that enables powerful in-gait kicks while preserving locomotion robustness. On the software side, we develop an integrated perception and localization framework that combines stereo vision, object detection, and landmark-based fusion to provide reliable estimates of the ball, goals, teammates, and opponents. A mid-level navigation stack then generates collision-aware, dynamically feasible trajectories, while a centralized behavior manager coordinates high-level decision making, role selection, and kick execution based on the evolving game state. The seamless integration of these subsystems results in fast, precise, and tactically effective gameplay, enabling robust performance under the dynamic and adversarial conditions of real matches. This paper presents the design principles, system architecture, and experimental results that contributed to ARTEMIS's success as the 2024 Adult-Sized Humanoid Soccer champion.
Fast and Robust Localization for Humanoid Soccer Robot via Iterative Landmark Matching
Mar 14, 2025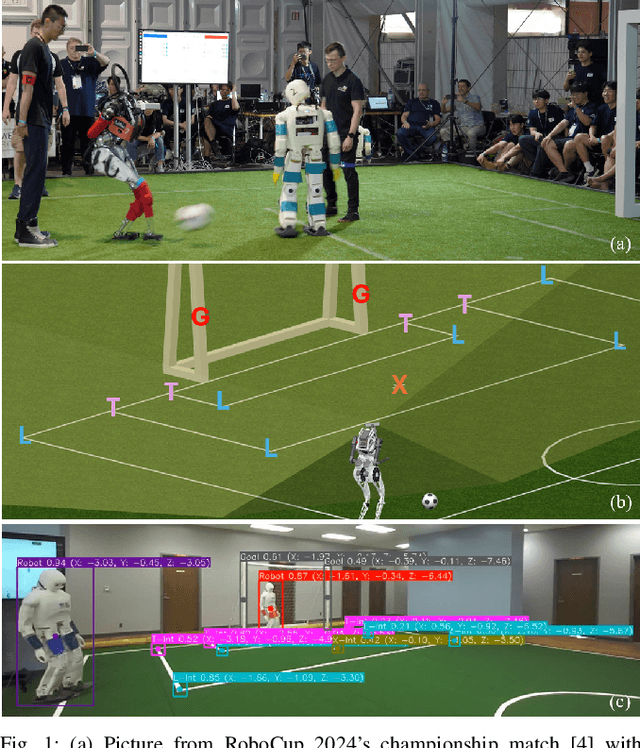
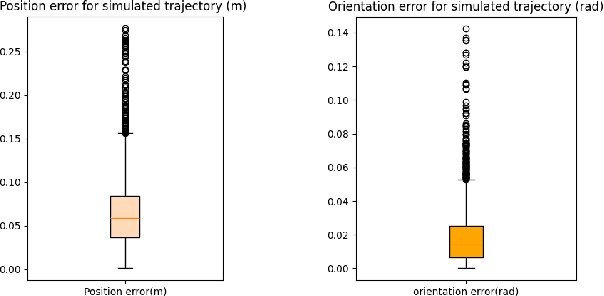
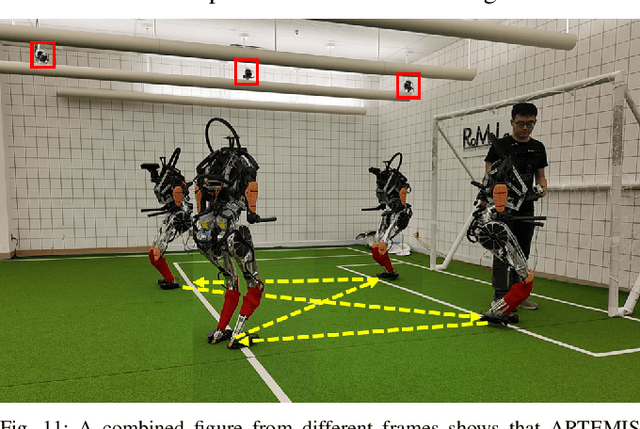
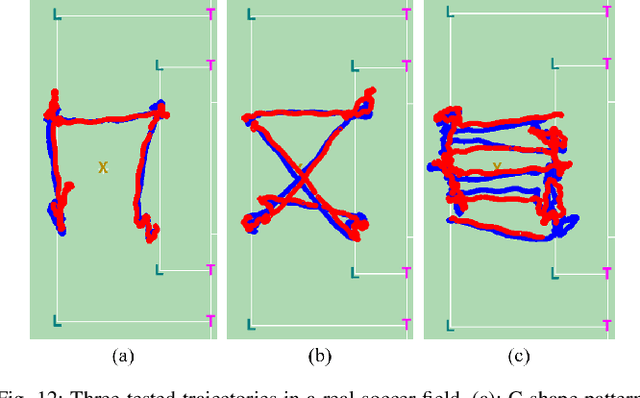
Accurate robot localization is essential for effective operation. Monte Carlo Localization (MCL) is commonly used with known maps but is computationally expensive due to landmark matching for each particle. Humanoid robots face additional challenges, including sensor noise from locomotion vibrations and a limited field of view (FOV) due to camera placement. This paper proposes a fast and robust localization method via iterative landmark matching (ILM) for humanoid robots. The iterative matching process improves the accuracy of the landmark association so that it does not need MCL to match landmarks to particles. Pose estimation with the outlier removal process enhances its robustness to measurement noise and faulty detections. Furthermore, an additional filter can be utilized to fuse inertial data from the inertial measurement unit (IMU) and pose data from localization. We compared ILM with Iterative Closest Point (ICP), which shows that ILM method is more robust towards the error in the initial guess and easier to get a correct matching. We also compared ILM with the Augmented Monte Carlo Localization (aMCL), which shows that ILM method is much faster than aMCL and even more accurate. The proposed method's effectiveness is thoroughly evaluated through experiments and validated on the humanoid robot ARTEMIS during RoboCup 2024 adult-sized soccer competition.
YORI: Autonomous Cooking System Utilizing a Modular Robotic Kitchen and a Dual-Arm Proprioceptive Manipulator
May 17, 2024
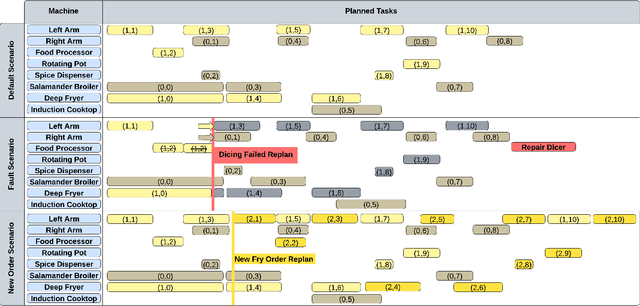
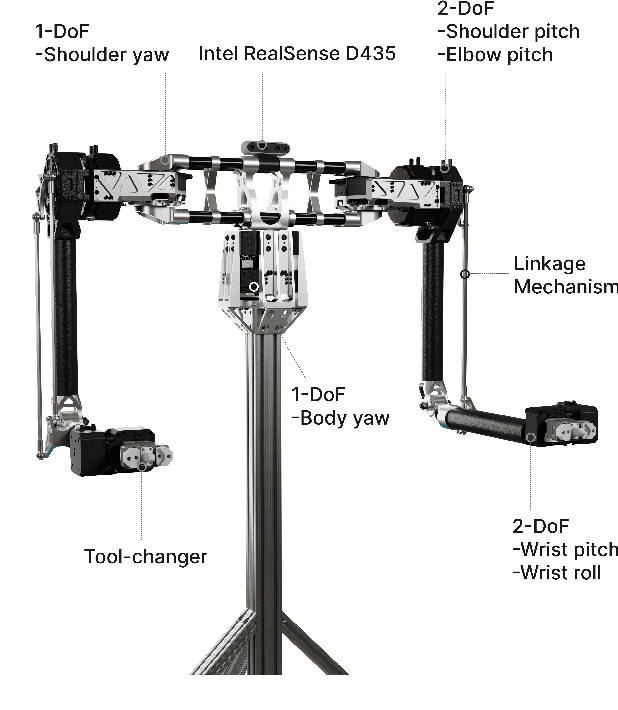
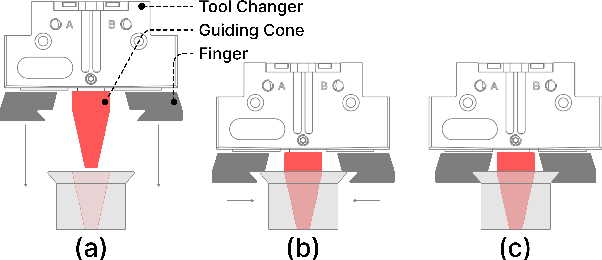
This article introduces the development and implementation of the Yummy Operations Robot Initiative (YORI), an innovative, autonomous robotic cooking system. YORI marks a major advancement in culinary automation, adept at handling a diverse range of cooking tasks, capable of preparing multiple dishes simultaneously, and offering the flexibility to adapt to an extensive array of culinary activities. This versatility is achieved through the use of custom tools and appliances operated by a dual arm manipulator utilizing proprioceptive actuators. The use of proprioceptive actuators enables fast yet precise movements, while allowing for accurate force control and effectively mitigating the inevitable impacts encountered in cooking. These factors underscore this technology's boundless potential. A key to YORI's adaptability is its modular kitchen design, which allows for easy adaptations to accommodate a continuously increasing range of culinary tasks. This article provides a comprehensive look at YORI's design process, and highlights its role in revolutionizing the culinary world by enhancing efficiency, consistency, and versatility in food preparation.
Enhancing State Estimator for Autonomous Race Car : Leveraging Multi-modal System and Managing Computing Resources
Aug 14, 2023
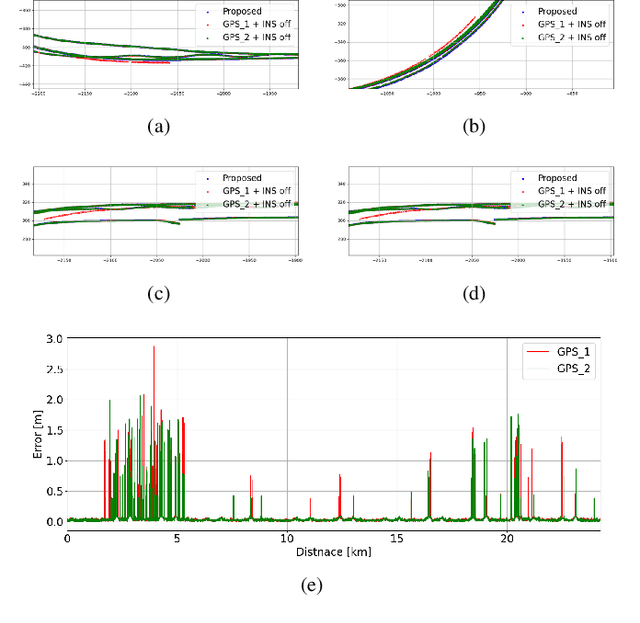
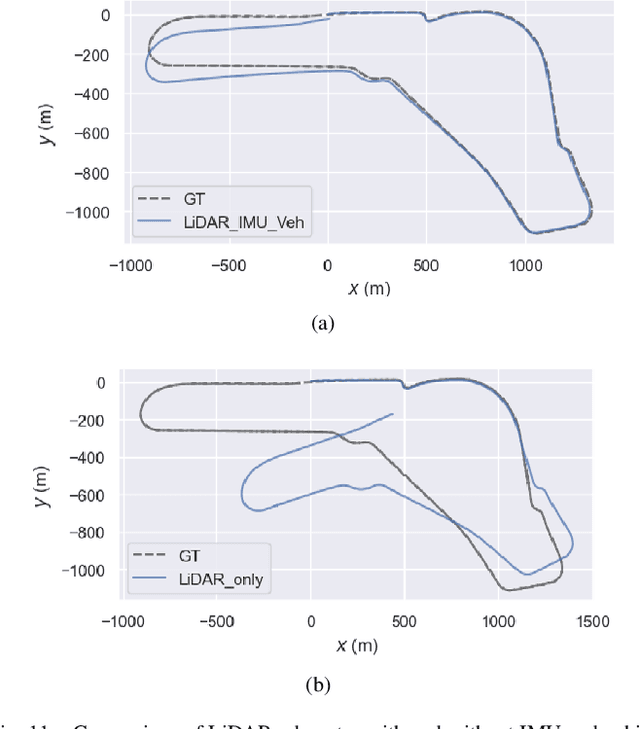
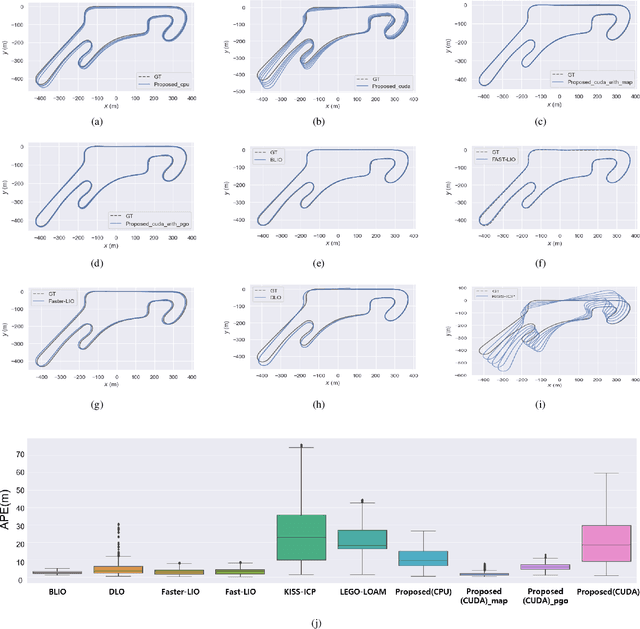
This paper introduces an innovative approach to enhance the state estimator for high-speed autonomous race cars, addressing challenges related to unreliable measurements, localization failures, and computing resource management. The proposed robust localization system utilizes a Bayesian-based probabilistic approach to evaluate multimodal measurements, ensuring the use of credible data for accurate and reliable localization, even in harsh racing conditions. To tackle potential localization failures during intense racing, we present a resilient navigation system. This system enables the race car to continue track-following by leveraging direct perception information in planning and execution, ensuring continuous performance despite localization disruptions. Efficient computing resource management is critical to avoid overload and system failure. We optimize computing resources using an efficient LiDAR-based state estimation method. Leveraging CUDA programming and GPU acceleration, we perform nearest points search and covariance computation efficiently, overcoming CPU bottlenecks. Real-world and simulation tests validate the system's performance and resilience. The proposed approach successfully recovers from failures, effectively preventing accidents and ensuring race car safety.
ELiOT : End-to-end Lidar Odometry using Transformer Framework
Jul 31, 2023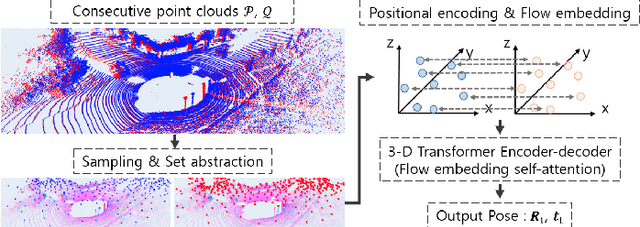
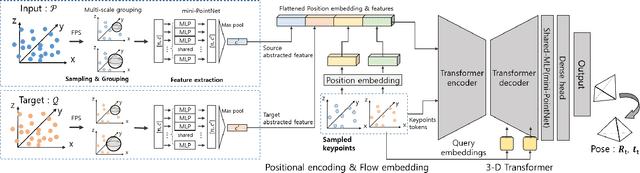
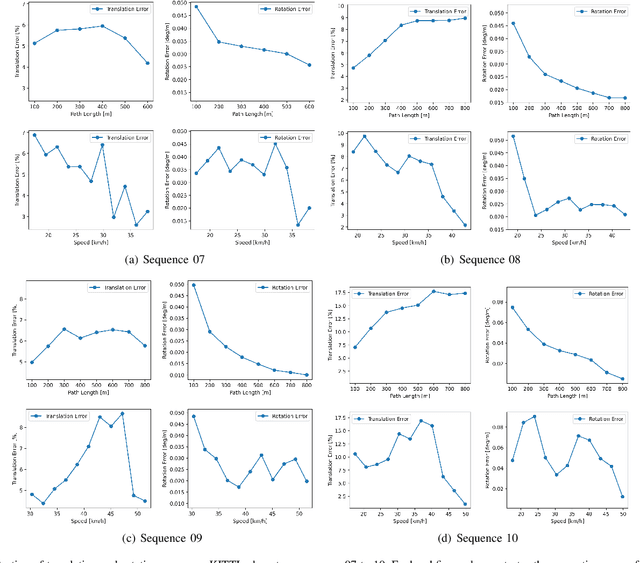
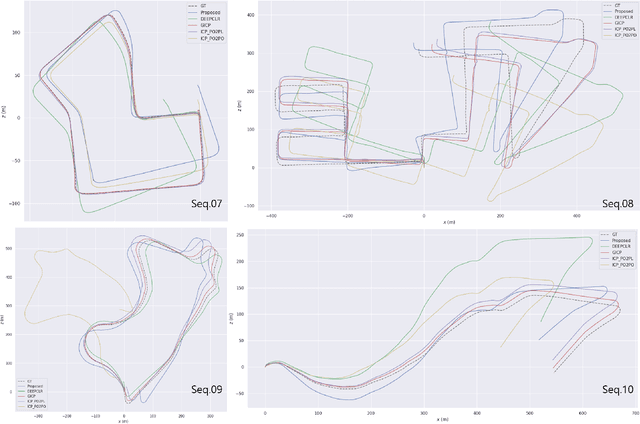
In recent years, deep-learning-based point cloud registration methods have shown significant promise. Furthermore, learning-based 3D detectors have demonstrated their effectiveness in encoding semantic information from LiDAR data. In this paper, we introduce ELiOT, an end-to-end LiDAR odometry framework built on a transformer architecture. Our proposed Self-attention flow embedding network implicitly represents the motion of sequential LiDAR scenes, bypassing the need for 3D-2D projections traditionally used in such tasks. The network pipeline, composed of a 3D transformer encoder-decoder, has shown effectiveness in predicting poses on urban datasets. In terms of translational and rotational errors, our proposed method yields encouraging results, with 7.59% and 2.67% respectively on the KITTI odometry dataset. This is achieved with an end-to-end approach that foregoes the need for conventional geometric concepts.