 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Trajectory Optimization and Contact Selection for Multi-Modal Manipulation Planning
Jun 10, 2023Complex dexterous manipulations require switching between prehensile and non-prehensile grasps, and sliding and pivoting the object against the environment. This paper presents a manipulation planner that is able to reason about diverse changes of contacts to discover such plans. It implements a hybrid approach that performs contact-implicit trajectory optimization for pivoting and sliding manipulation primitives and sampling-based planning to change between manipulation primitives and target object poses. The optimization method, simultaneous trajectory optimization and contact selection (STOCS), introduces an infinite programming framework to dynamically select from contact points and support forces between the object and environment during a manipulation primitive. To sequence manipulation primitives, a sampling-based tree-growing planner uses STOCS to construct a manipulation tree. We show that by using a powerful trajectory optimizer, the proposed planner can discover multi-modal manipulation trajectories involving grasping, sliding, and pivoting within a few dozen samples. The resulting trajectories are verified to enable a 6 DoF manipulator to manipulate physical objects successfully.
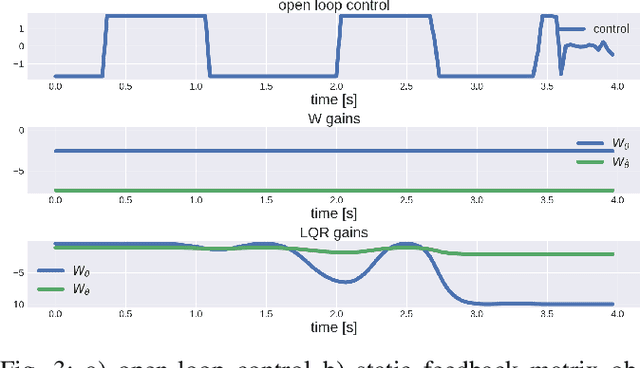
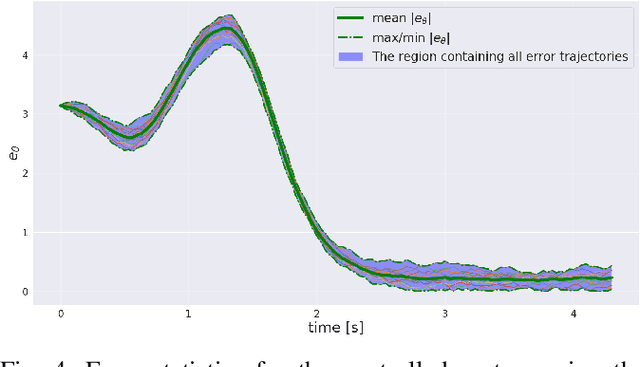
Covariance Steering for Uncertain Contact-rich Systems
Mar 23, 2023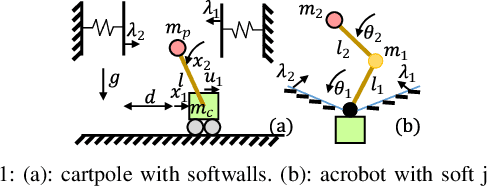
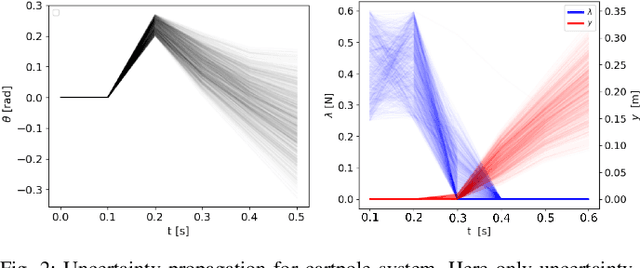
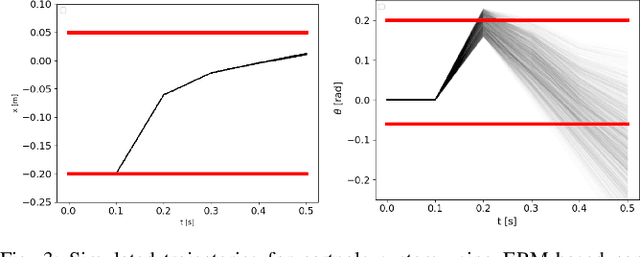
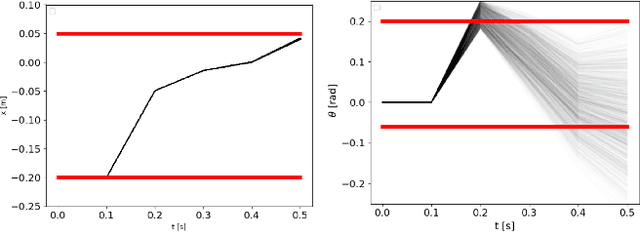
Planning and control for uncertain contact systems is challenging as it is not clear how to propagate uncertainty for planning. Contact-rich tasks can be modeled efficiently using complementarity constraints among other techniques. In this paper, we present a stochastic optimization technique with chance constraints for systems with stochastic complementarity constraints. We use a particle filter-based approach to propagate moments for stochastic complementarity system. To circumvent the issues of open-loop chance constrained planning, we propose a contact-aware controller for covariance steering of the complementarity system. Our optimization problem is formulated as Non-Linear Programming (NLP) using bilevel optimization. We present an important-particle algorithm for numerical efficiency for the underlying control problem. We verify that our contact-aware closed-loop controller is able to steer the covariance of the states under stochastic contact-rich tasks.
Robust Pivoting Manipulation using Contact Implicit Bilevel Optimization
Mar 15, 2023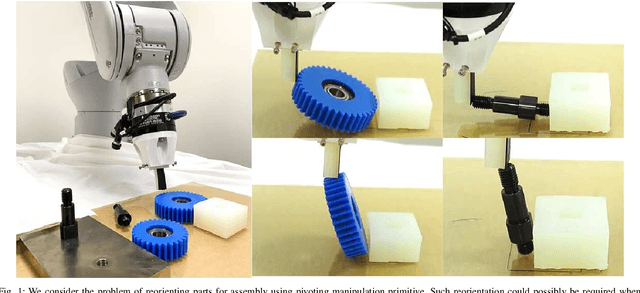
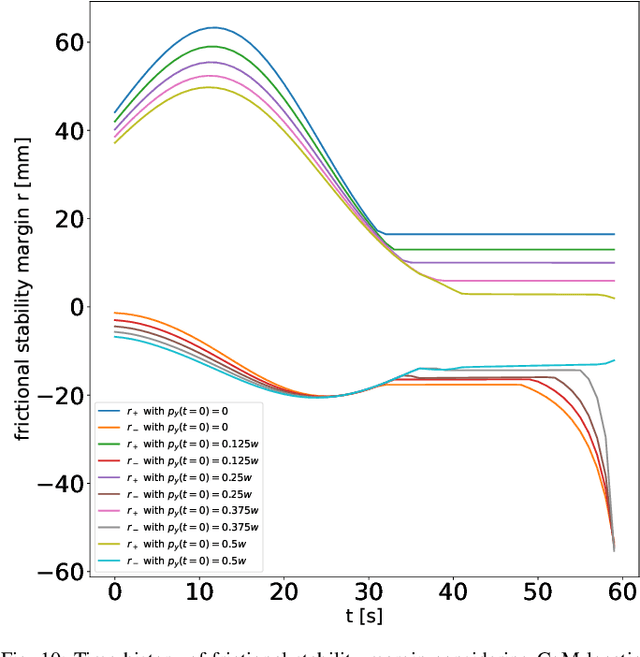
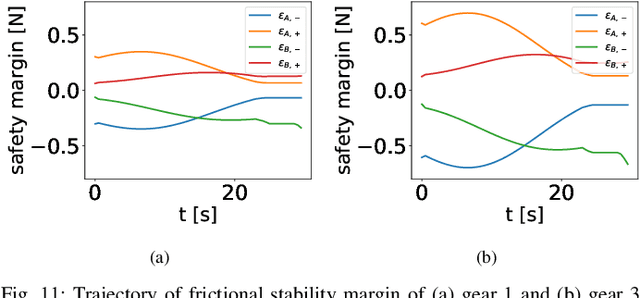
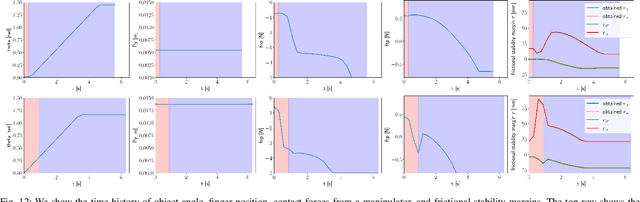
Generalizable manipulation requires that robots be able to interact with novel objects and environment. This requirement makes manipulation extremely challenging as a robot has to reason about complex frictional interactions with uncertainty in physical properties of the object and the environment. In this paper, we study robust optimization for planning of pivoting manipulation in the presence of uncertainties. We present insights about how friction can be exploited to compensate for inaccuracies in the estimates of the physical properties during manipulation. Under certain assumptions, we derive analytical expressions for stability margin provided by friction during pivoting manipulation. This margin is then used in a Contact Implicit Bilevel Optimization (CIBO) framework to optimize a trajectory that maximizes this stability margin to provide robustness against uncertainty in several physical parameters of the object. We present analysis of the stability margin with respect to several parameters involved in the underlying bilevel optimization problem. We demonstrate our proposed method using a 6 DoF manipulator for manipulating several different objects.
Tactile Tool Manipulation
Jan 17, 2023Humans can effortlessly perform very complex, dexterous manipulation tasks by reacting to sensor observations. In contrast, robots can not perform reactive manipulation and they mostly operate in open-loop while interacting with their environment. Consequently, the current manipulation algorithms either are inefficient in performance or can only work in highly structured environments. In this paper, we present closed-loop control of a complex manipulation task where a robot uses a tool to interact with objects. Manipulation using a tool leads to complex kinematics and contact constraints that need to be satisfied for generating feasible manipulation trajectories. We first present an open-loop controller design using Non-Linear Programming (NLP) that satisfies these constraints. In order to design a closed-loop controller, we present a pose estimator of objects and tools using tactile sensors. Using our tactile estimator, we design a closed-loop controller based on Model Predictive Control (MPC). The proposed algorithm is verified using a 6 DoF manipulator on tasks using a variety of objects and tools. We verify that our closed-loop controller can successfully perform tool manipulation under several unexpected contacts. Video summarizing this work and hardware experiments are found https://youtu.be/VsClK04qDhk.
PYROBOCOP : Python-based Robotic Control & Optimization Package for Manipulation and Collision Avoidance
Jun 06, 2021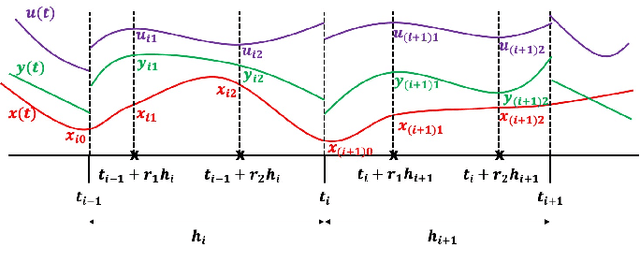


PYROBOCOP is a lightweight Python-based package for control and optimization of robotic systems described by nonlinear Differential Algebraic Equations (DAEs). In particular, the package can handle systems with contacts that are described by complementarity constraints and provides a general framework for specifying obstacle avoidance constraints. The package performs direct transcription of the DAEs into a set of nonlinear equations by performing orthogonal collocation on finite elements. The resulting optimization problem belongs to the class of Mathematical Programs with Complementarity Constraints (MPCCs). MPCCs fail to satisfy commonly assumed constraint qualifications and require special handling of the complementarity constraints in order for NonLinear Program (NLP) solvers to solve them effectively. PYROBOCOP provides automatic reformulation of the complementarity constraints that enables NLP solvers to perform optimization of robotic systems. The package is interfaced with ADOLC for obtaining sparse derivatives by automatic differentiation and IPOPT for performing optimization. We demonstrate the effectiveness of our approach in terms of speed and flexibility. We provide several numerical examples for several robotic systems with collision avoidance as well as contact constraints represented using complementarity constraints. We provide comparisons with other open source optimization packages like CasADi and Pyomo .
Local Policy Optimization for Trajectory-Centric Reinforcement Learning
Jan 22, 2020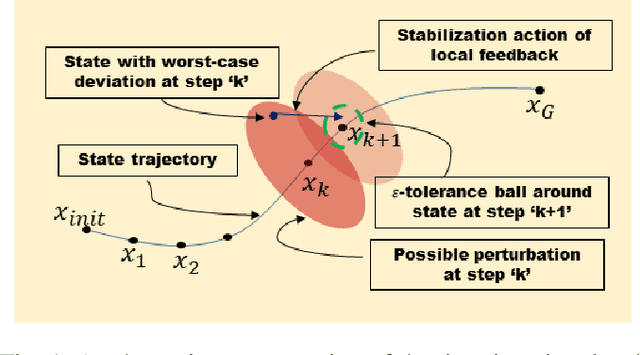
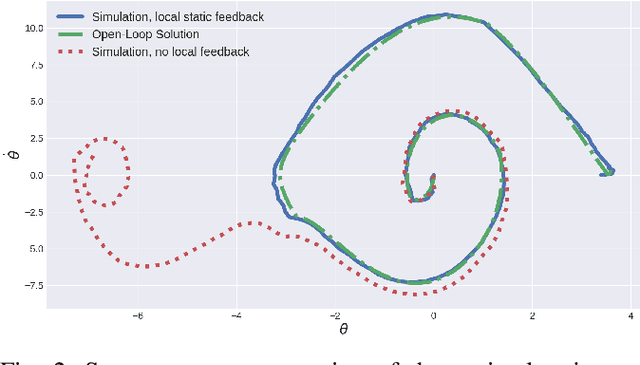
The goal of this paper is to present a method for simultaneous trajectory and local stabilizing policy optimization to generate local policies for trajectory-centric model-based reinforcement learning (MBRL). This is motivated by the fact that global policy optimization for non-linear systems could be a very challenging problem both algorithmically and numerically. However, a lot of robotic manipulation tasks are trajectory-centric, and thus do not require a global model or policy. Due to inaccuracies in the learned model estimates, an open-loop trajectory optimization process mostly results in very poor performance when used on the real system. Motivated by these problems, we try to formulate the problem of trajectory optimization and local policy synthesis as a single optimization problem. It is then solved simultaneously as an instance of nonlinear programming. We provide some results for analysis as well as achieved performance of the proposed technique under some simplifying assumptions.
JANOS: An Integrated Predictive and Prescriptive Modeling Framework
Nov 21, 2019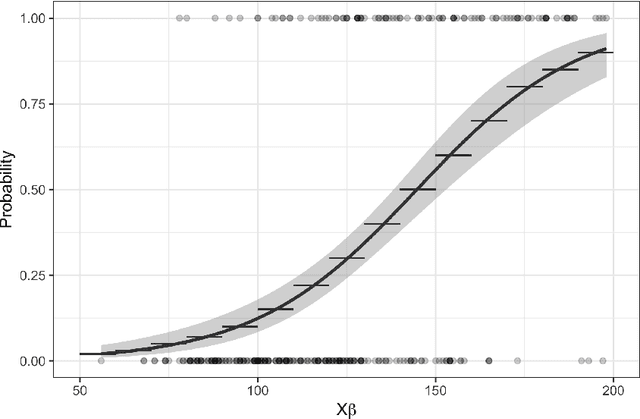
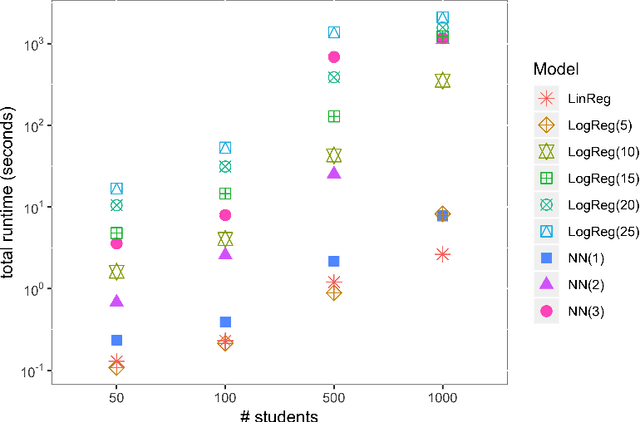
Business research practice is witnessing a surge in the integration of predictive modeling and prescriptive analysis. We describe a modeling framework JANOS that seamlessly integrates the two streams of analytics, for the first time allowing researchers and practitioners to embed machine learning models in an optimization framework. JANOS allows for specifying a prescriptive model using standard optimization modeling elements such as constraints and variables. The key novelty lies in providing modeling constructs that allow for the specification of commonly used predictive models and their features as constraints and variables in the optimization model. The framework considers two sets of decision variables; regular and predicted. The relationship between the regular and the predicted variables are specified by the user as pre-trained predictive models. JANOS currently supports linear regression, logistic regression, and neural network with rectified linear activation functions, but we plan to expand on this set in the future. In this paper, we demonstrate the flexibility of the framework through an example on scholarship allocation in a student enrollment problem and provide a numeric performance evaluation.
Game Theoretic Optimization via Gradient-based Nikaido-Isoda Function
May 15, 2019
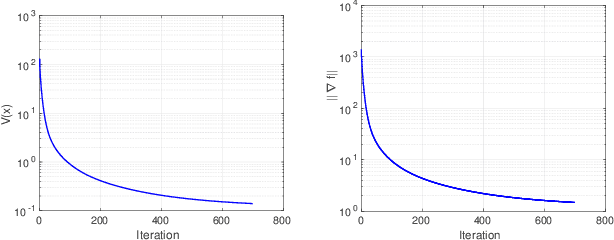
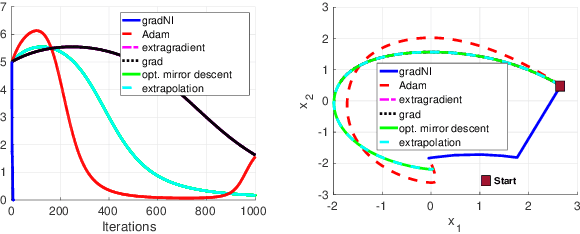
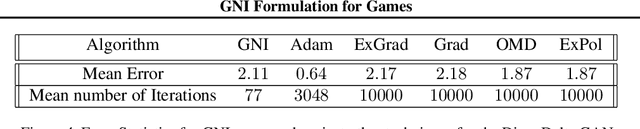
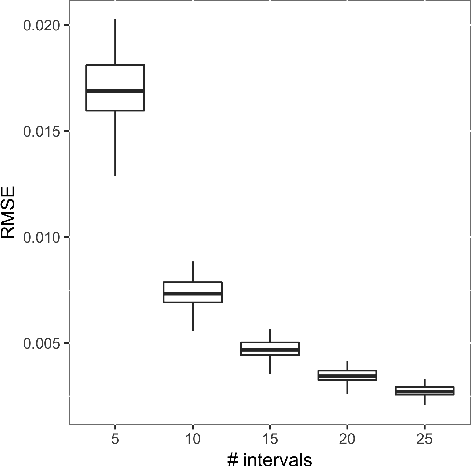
Computing Nash equilibrium (NE) of multi-player games has witnessed renewed interest due to recent advances in generative adversarial networks. However, computing equilibrium efficiently is challenging. To this end, we introduce the Gradient-based Nikaido-Isoda (GNI) function which serves: (i) as a merit function, vanishing only at the first-order stationary points of each player's optimization problem, and (ii) provides error bounds to a stationary Nash point. Gradient descent is shown to converge sublinearly to a first-order stationary point of the GNI function. For the particular case of bilinear min-max games and multi-player quadratic games, the GNI function is convex. Hence, the application of gradient descent in this case yields linear convergence to an NE (when one exists). In our numerical experiments, we observe that the GNI formulation always converges to the first-order stationary point of each player's optimization problem.
Submodular Function Maximization for Group Elevator Scheduling
Jun 28, 2017
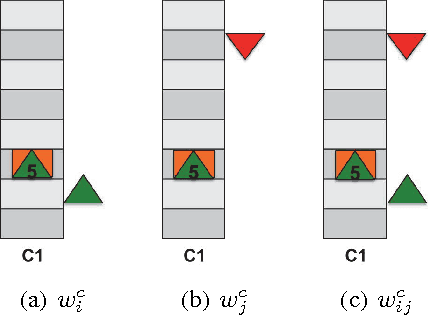
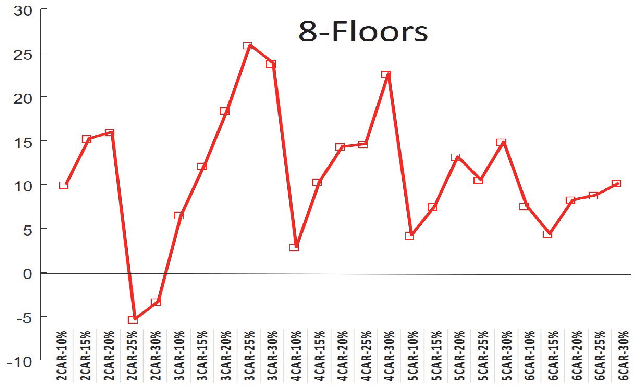
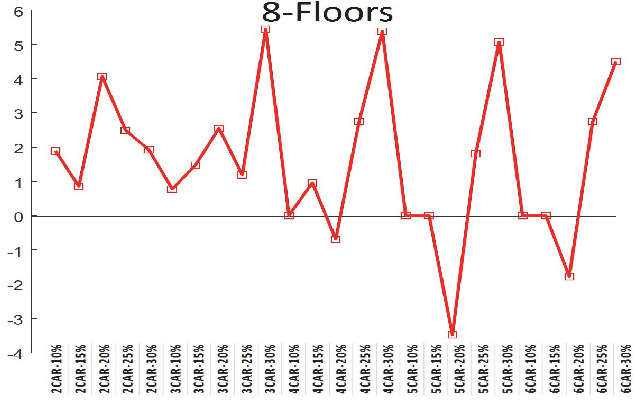
We propose a novel approach for group elevator scheduling by formulating it as the maximization of submodular function under a matroid constraint. In particular, we propose to model the total waiting time of passengers using a quadratic Boolean function. The unary and pairwise terms in the function denote the waiting time for single and pairwise allocation of passengers to elevators, respectively. We show that this objective function is submodular. The matroid constraints ensure that every passenger is allocated to exactly one elevator. We use a greedy algorithm to maximize the submodular objective function, and derive provable guarantees on the optimality of the solution. We tested our algorithm using Elevate 8, a commercial-grade elevator simulator that allows simulation with a wide range of elevator settings. We achieve significant improvement over the existing algorithms.