 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCovariance Steering for Uncertain Contact-rich Systems
Paper and Code
Mar 23, 2023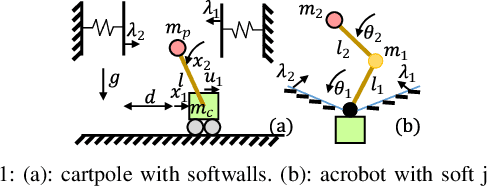
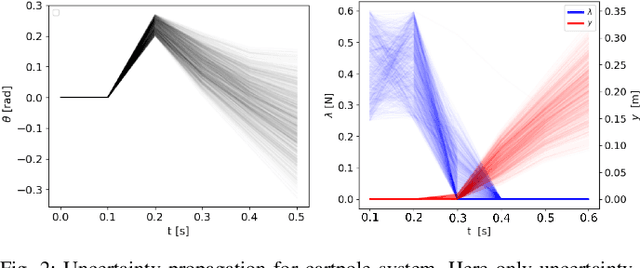
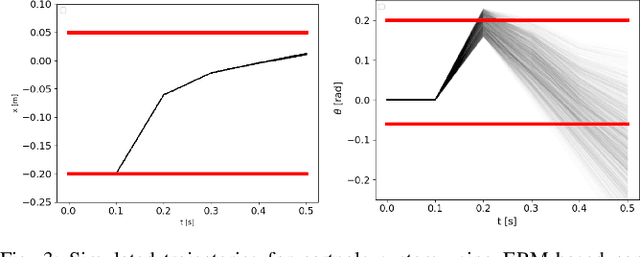
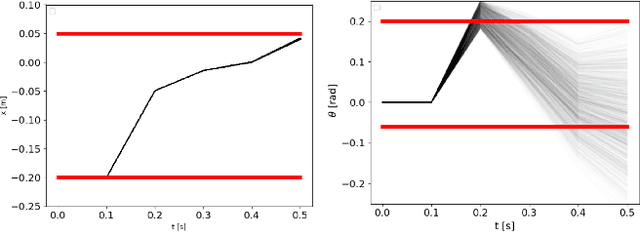
Planning and control for uncertain contact systems is challenging as it is not clear how to propagate uncertainty for planning. Contact-rich tasks can be modeled efficiently using complementarity constraints among other techniques. In this paper, we present a stochastic optimization technique with chance constraints for systems with stochastic complementarity constraints. We use a particle filter-based approach to propagate moments for stochastic complementarity system. To circumvent the issues of open-loop chance constrained planning, we propose a contact-aware controller for covariance steering of the complementarity system. Our optimization problem is formulated as Non-Linear Programming (NLP) using bilevel optimization. We present an important-particle algorithm for numerical efficiency for the underlying control problem. We verify that our contact-aware closed-loop controller is able to steer the covariance of the states under stochastic contact-rich tasks.