 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hierarchical, Model-Based System for High-Performance Humanoid Soccer
Dec 10, 2025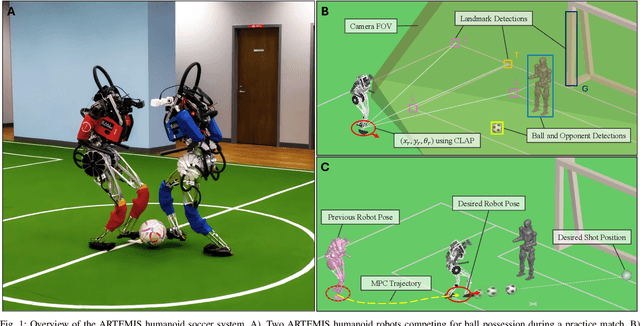
The development of athletic humanoid robots has gained significant attention as advances in actuation, sensing, and control enable increasingly dynamic, real-world capabilities. RoboCup, an international competition of fully autonomous humanoid robots, provides a uniquely challenging benchmark for such systems, culminating in the long-term goal of competing against human soccer players by 2050. This paper presents the hardware and software innovations underlying our team's victory in the RoboCup 2024 Adult-Sized Humanoid Soccer Competition. On the hardware side, we introduce an adult-sized humanoid platform built with lightweight structural components, high-torque quasi-direct-drive actuators, and a specialized foot design that enables powerful in-gait kicks while preserving locomotion robustness. On the software side, we develop an integrated perception and localization framework that combines stereo vision, object detection, and landmark-based fusion to provide reliable estimates of the ball, goals, teammates, and opponents. A mid-level navigation stack then generates collision-aware, dynamically feasible trajectories, while a centralized behavior manager coordinates high-level decision making, role selection, and kick execution based on the evolving game state. The seamless integration of these subsystems results in fast, precise, and tactically effective gameplay, enabling robust performance under the dynamic and adversarial conditions of real matches. This paper presents the design principles, system architecture, and experimental results that contributed to ARTEMIS's success as the 2024 Adult-Sized Humanoid Soccer champion.
Tethered Variable Inertial Attitude Control Mechanisms through a Modular Jumping Limbed Robot
Jan 17, 2025



This paper presents the concept of a tethered variable inertial attitude control mechanism for a modular jumping-limbed robot designed for planetary exploration in low-gravity environments. The system, named SPLITTER, comprises two sub-10 kg quadrupedal robots connected by a tether, capable of executing successive jumping gaits and stabilizing in-flight using inertial morphing technology. Through model predictive control (MPC), attitude control was demonstrated by adjusting the limbs and tether length to modulate the system's principal moments of inertia. Our results indicate that this control strategy allows the robot to stabilize during flight phases without needing traditional flywheel-based systems or relying on aerodynamics, making the approach mass-efficient and ideal for small-scale planetary robots' successive jumps. The paper outlines the dynamics, MPC formulation for inertial morphing, actuator requirements, and simulation results, illustrating the potential of agile exploration for small-scale rovers in low-gravity environments like the Moon or asteroids.
Mechanisms and Computational Design of Multi-Modal End-Effector with Force Sensing using Gated Networks
Oct 23, 2024In limbed robotics, end-effectors must serve dual functions, such as both feet for locomotion and grippers for grasping, which presents design challenges. This paper introduces a multi-modal end-effector capable of transitioning between flat and line foot configurations while providing grasping capabilities. MAGPIE integrates 8-axis force sensing using proposed mechanisms with hall effect sensors, enabling both contact and tactile force measurements. We present a computational design framework for our sensing mechanism that accounts for noise and interference, allowing for desired sensitivity and force ranges and generating ideal inverse models. The hardware implementation of MAGPIE is validated through experiments, demonstrating its capability as a foot and verifying the performance of the sensing mechanisms, ideal models, and gated network-based models.
Cycloidal Quasi-Direct Drive Actuator Designs with Learning-based Torque Estimation for Legged Robotics
Oct 22, 2024



This paper presents a novel approach through the design and implementation of Cycloidal Quasi-Direct Drive actuators for legged robotics. The cycloidal gear mechanism, with its inherent high torque density and mechanical robustness, offers significant advantages over conventional designs. By integrating cycloidal gears into the Quasi-Direct Drive framework, we aim to enhance the performance of legged robots, particularly in tasks demanding high torque and dynamic loads, while still keeping them lightweight. Additionally, we develop a torque estimation framework for the actuator using an Actuator Network, which effectively reduces the sim-to-real gap introduced by the cycloidal drive's complex dynamics. This integration is crucial for capturing the complex dynamics of a cycloidal drive, which contributes to improved learning efficiency, agility, and adaptability for reinforcement learning.