 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadrature Oscillation System for Coordinated Motion in Crawling Origami Robot
Mar 24, 2026Origami-inspired robots offer rapid, accessible design and manufacture with diverse functionalities. In particular, origami robots without conventional electronics have the unique advantage of functioning in extreme environments such as ones with high radiation or large magnetic fields. However, the absence of sophisticated control systems limits these robots to simple autonomous behaviors. In our previous studies, we developed a printable, electronics-free, and self-sustained oscillator that generates simple complementary square-wave signals. Our study presents a quadrature oscillation system capable of generating four square-wave signals a quarter-cycle out of phase, enabling four distinct states. Such control signals are important in various engineering and robotics applications, such as orchestrating limb movements in bio-inspired robots. We demonstrate the practicality and value of this oscillation system by designing and constructing an origami crawling robot that utilizes the quadrature oscillator to achieve coordinated locomotion. Together, the oscillator and robot illustrate the potential for more complex control and functions in origami robotics, paving the way for more electronics-free, rapid-design origami robots with advanced autonomous behaviors.
Mechanisms and Computational Design of Multi-Modal End-Effector with Force Sensing using Gated Networks
Oct 23, 2024



In limbed robotics, end-effectors must serve dual functions, such as both feet for locomotion and grippers for grasping, which presents design challenges. This paper introduces a multi-modal end-effector capable of transitioning between flat and line foot configurations while providing grasping capabilities. MAGPIE integrates 8-axis force sensing using proposed mechanisms with hall effect sensors, enabling both contact and tactile force measurements. We present a computational design framework for our sensing mechanism that accounts for noise and interference, allowing for desired sensitivity and force ranges and generating ideal inverse models. The hardware implementation of MAGPIE is validated through experiments, demonstrating its capability as a foot and verifying the performance of the sensing mechanisms, ideal models, and gated network-based models.
Self-Deployable, Adaptive Soft Robots Based on Contracting-Cord Particle Jamming
Oct 03, 2024We developed a new class of soft locomotive robots that can self-assemble into a preprogrammed configuration and vary their stiffness afterward in a highly integrated, compact body using contracting-cord particle jamming (CCPJ). We demonstrate this with a tripod-shaped robot, TripodBot, consisting of three CCPJ-based legs attached to a central body. TripodBot is intrinsically soft and can be stored and transported in a compact configuration. On site, it can self-deploy and crawl in a slip-stick manner through the shape morphing of its legs; a simplified analytical model accurately captures the speed. The robot's adaptability is demonstrated by its ability to navigate tunnels as narrow as 61 percent of its deployed body width and ceilings as low as 31 percent of its freestanding height. Additionally, it can climb slopes up to 15 degrees, carry a load of 5 grams (2.4 times its weight), and bear a load 9429 times its weight.
Self-deployable contracting-cord metamaterials with tunable mechanical properties
Jul 08, 2024Recent advances in active materials and fabrication techniques have enabled the production of cyclically self-deployable metamaterials with an expanded functionality space. However, designing metamaterials that possess continuously tunable mechanical properties after self-deployment remains a challenge, notwithstanding its importance. Inspired by push puppets, we introduce an efficient design strategy to create reversibly self-deployable metamaterials with continuously tunable post-deployment stiffness and damping. Our metamaterial comprises contracting actuators threaded through beads with matching conical concavo-convex interfaces in networked chains. The slack network conforms to arbitrary shapes, but when actuated, it self-assembles into a preprogrammed configuration with beads gathered together. Further contraction of the actuators can dynamically tune the assembly's mechanical properties through the beads' particle jamming, while maintaining the overall structure with minimal change. We show that, after deployment, such metamaterials exhibit pronounced tunability in bending-dominated configurations: they can become more than 35 times stiffer and change their damping capability by over 50%. Through systematic analysis, we find that the beads'conical angle can introduce geometric nonlinearity, which has a major effect on the self-deployability and tunability of the metamaterial. Our work provides routes towards reversibly self-deployable, lightweight, and tunable metamaterials, with potential applications in soft robotics, reconfigurable architectures, and space engineering.
* 6 figures
Population-aware Online Mirror Descent for Mean-Field Games by Deep Reinforcement Learning
Mar 06, 2024Mean Field Games (MFGs) have the ability to handle large-scale multi-agent systems, but learning Nash equilibria in MFGs remains a challenging task. In this paper, we propose a deep reinforcement learning (DRL) algorithm that achieves population-dependent Nash equilibrium without the need for averaging or sampling from history, inspired by Munchausen RL and Online Mirror Descent. Through the design of an additional inner-loop replay buffer, the agents can effectively learn to achieve Nash equilibrium from any distribution, mitigating catastrophic forgetting. The resulting policy can be applied to various initial distributions. Numerical experiments on four canonical examples demonstrate our algorithm has better convergence properties than SOTA algorithms, in particular a DRL version of Fictitious Play for population-dependent policies.
Cost-Driven Hardware-Software Co-Optimization of Machine Learning Pipelines
Oct 19, 2023



Researchers have long touted a vision of the future enabled by a proliferation of internet-of-things devices, including smart sensors, homes, and cities. Increasingly, embedding intelligence in such devices involves the use of deep neural networks. However, their storage and processing requirements make them prohibitive for cheap, off-the-shelf platforms. Overcoming those requirements is necessary for enabling widely-applicable smart devices. While many ways of making models smaller and more efficient have been developed, there is a lack of understanding of which ones are best suited for particular scenarios. More importantly for edge platforms, those choices cannot be analyzed in isolation from cost and user experience. In this work, we holistically explore how quantization, model scaling, and multi-modality interact with system components such as memory, sensors, and processors. We perform this hardware/software co-design from the cost, latency, and user-experience perspective, and develop a set of guidelines for optimal system design and model deployment for the most cost-constrained platforms. We demonstrate our approach using an end-to-end, on-device, biometric user authentication system using a $20 ESP-EYE board.
REMS: Middleware for Robotics Education and Development
Oct 11, 2022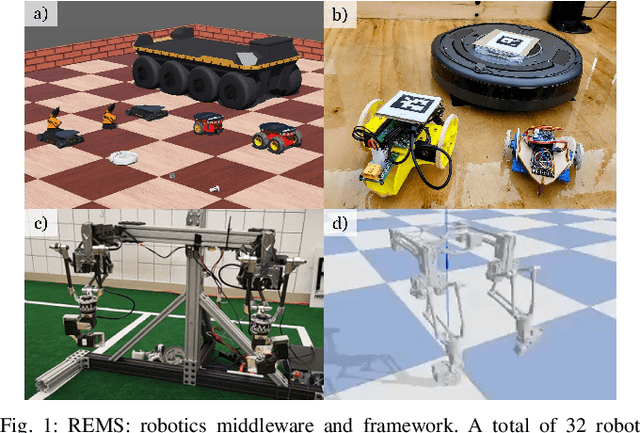
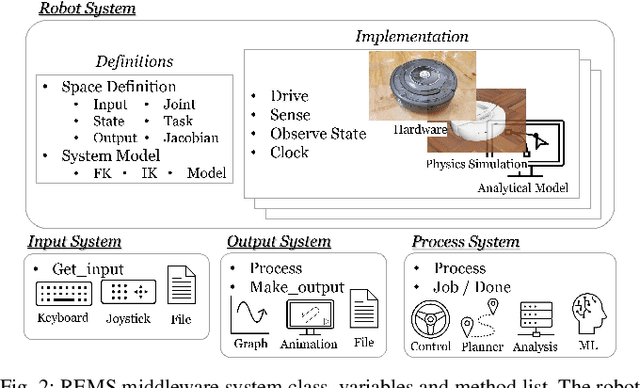
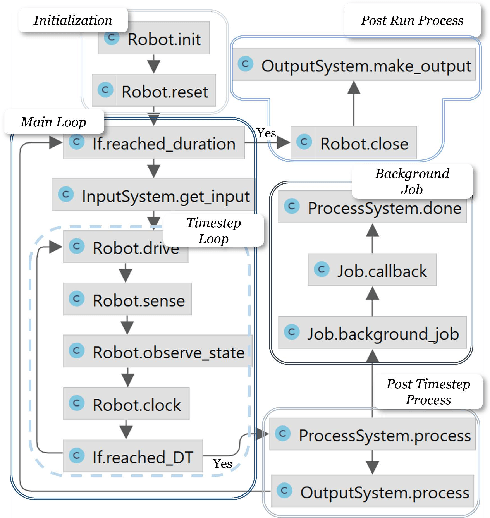
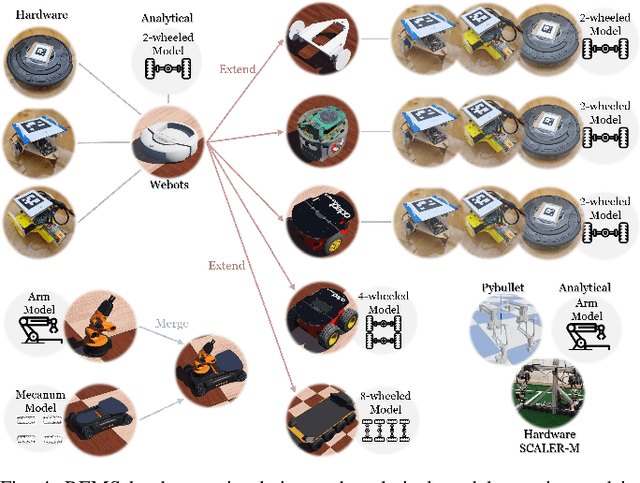
This paper introduces REMS, a robotics middleware and control framework that is designed to introduce the Zen of Python to robotics and to improve robotics education and development flow. Although existing middleware can serve hardware abstraction and modularity, setting up environments and learning middleware-specific syntax and procedures are less viable in education. They can curb opportunities to understand robotics concepts, theories, and algorithms. Robotics is a field of integration; students and developers from various backgrounds will be involved in programming. Establishing Pythonic and object-oriented robotic framework in a natural way can enhance modular and abstracted programming for better readability, reusability, and simplicity, but also supports useful and practical skills generally in coding. REMS is to be a valuable robot educational medium not just as a tool and to be a platform from one robot to multi-agent across hardware, simulation, and analytical model implementations.
An origami crawling robot driven by a folded self-sustained oscillator
Feb 07, 2022
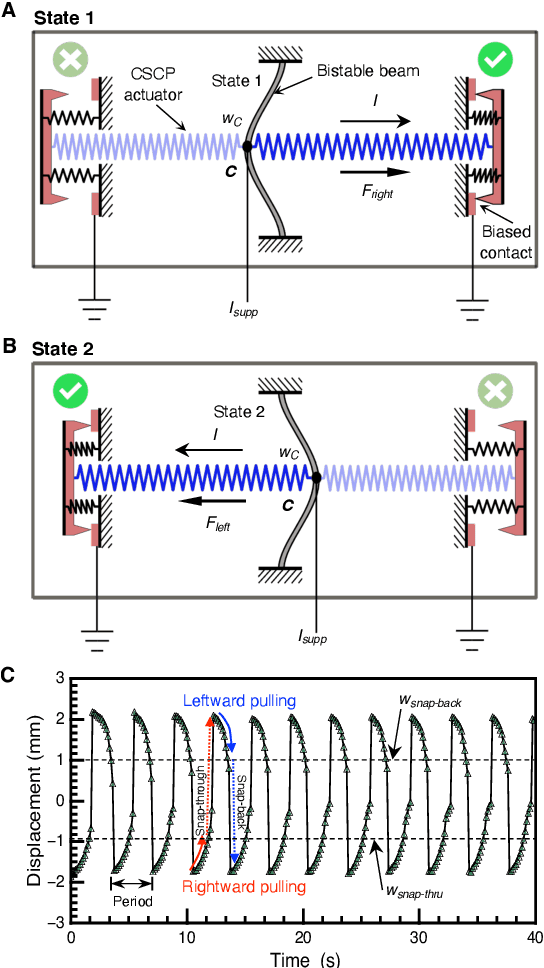
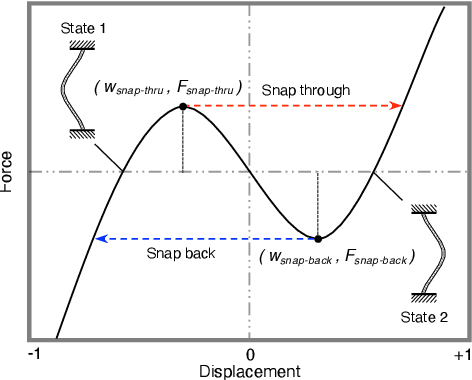

Locomotive robots that do not rely on electronics and/or electromagnetic components will open up new perspectives and applications for robotics. However, these robots usually involve complicated and tedious fabrication processes, limiting their applications. Here, we develop an easy-to-fabricate crawling robot by embedding simple control and actuation into origami-inspired mechanisms through folding, eliminating the need for discrete electronics and transducers. Our crawling robot locomotes through directional friction propelled by an onboard origami self-sustained oscillator, which generates periodic actuation from a single source of constant power. The crawling robot is lightweight (~ 3.8 gram), ultra low-cost (~ US $1), nonmagnetic, and electronic-free; it may enable practical applications in extreme environments, e.g., large radiation or magnetic fields. The robot can be fabricated through a monolithic origami-inspired folding-based method with universal materials, i.e., sheet materials and conductive threads. This rapid design and fabrication approach enables the programmable assembly of various mechanisms within this manufacturing paradigm, laying the foundation for autonomous, untethered robots without requiring electronics.
Joint State and Input Estimation of Agent Based on Recursive Kalman Filter Given Prior Knowledge
Nov 15, 2021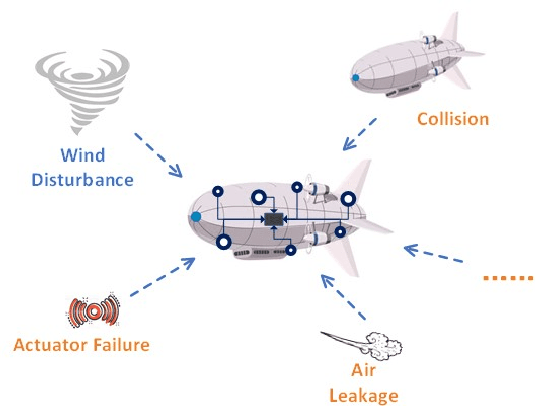
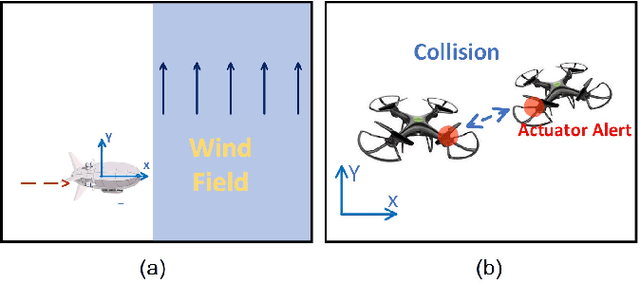
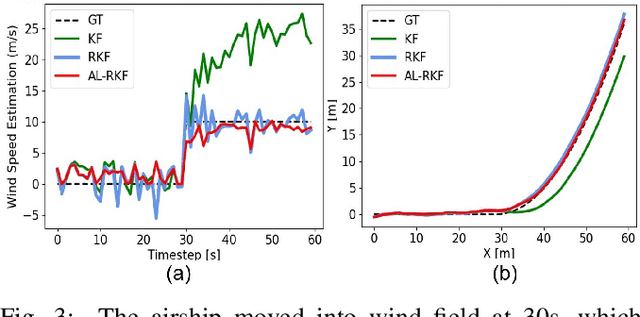
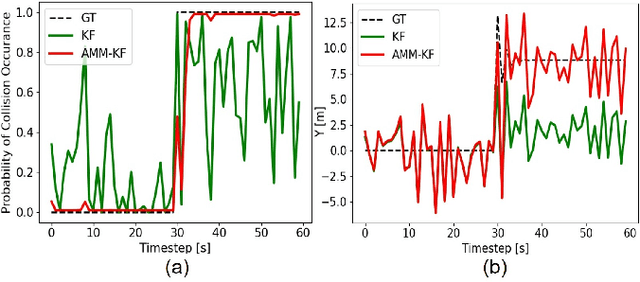
Modern autonomous systems are purposed for many challenging scenarios, where agents will face unexpected events and complicated tasks. The presence of disturbance noise with control command and unknown inputs can negatively impact robot performance. Previous research of joint input and state estimation separately study the continuous and discrete cases without any prior information. This paper combines the continuous space and discrete space estimation into a unified theory based on the Expectation-Maximum (EM) algorithm. By introducing prior knowledge of events as the constraint, inequality optimization problems are formulated to determine a gain matrix or dynamic weights to realize an optimal input estimation with lower variance and more accurate decision-making. Finally, statistical results from experiments show that our algorithm owns 81\% improvement of the variance than KF and 47\% improvement than RKF in continuous space; a remarkable improvement of right decision-making probability of our input estimator in discrete space, identification ability is also analyzed by experiments.
Direct LiDAR Odometry: Fast Localization with Dense Point Clouds
Oct 01, 2021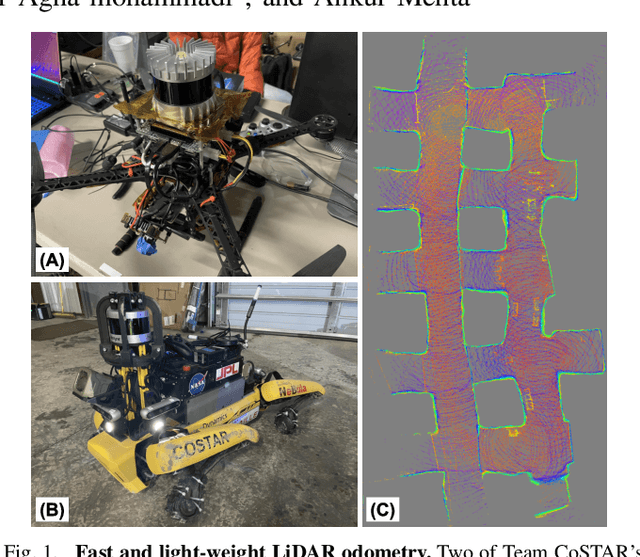
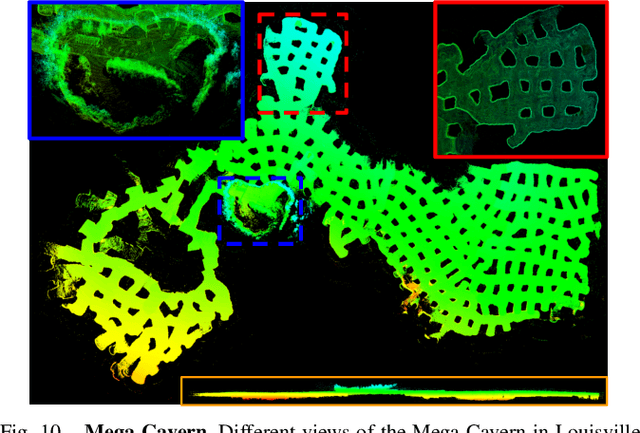
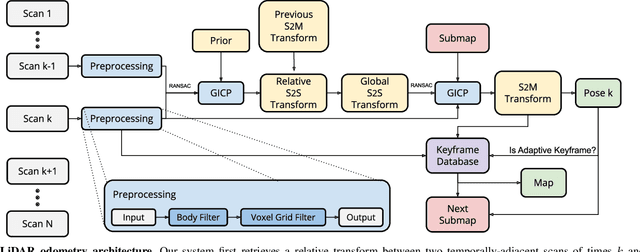
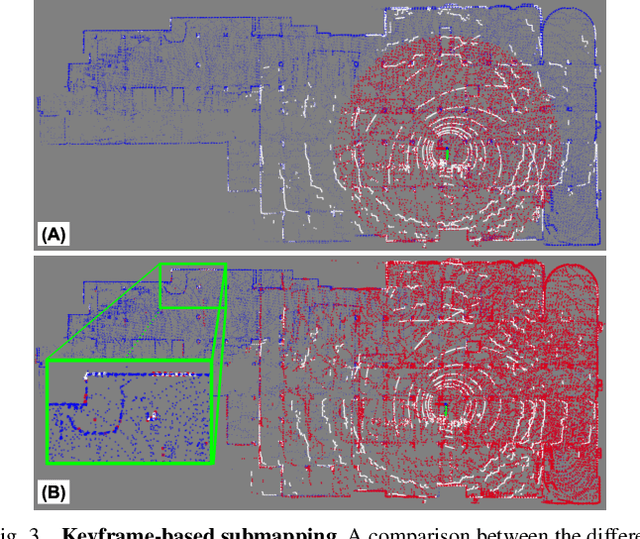
This paper presents a light-weight frontend LiDAR odometry solution with consistent and accurate localization for computationally-limited robotic platforms. Our Direct LiDAR Odometry (DLO) method includes several key algorithmic innovations which prioritize computational efficiency and enables the use of full, minimally-preprocessed point clouds to provide accurate pose estimates in real-time. This work also presents several important algorithmic insights and design choices from developing on platforms with shared or otherwise limited computational resources, including a custom iterative closest point solver for fast point cloud registration with data structure recycling. Our method is more accurate with lower computational overhead than the current state-of-the-art and has been extensively evaluated in several perceptually-challenging environments on aerial and legged robots as part of NASA JPL Team CoSTAR's research and development efforts for the DARPA Subterranean Challenge.