 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResilient and consistent multirobot cooperative localization with covariance intersection
Aug 19, 2021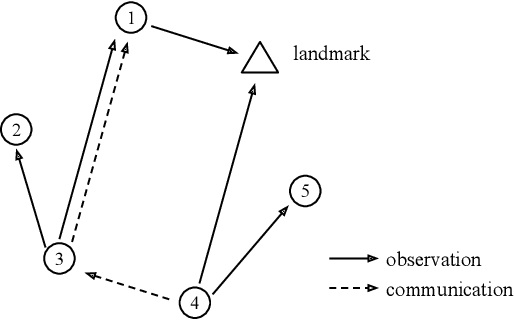
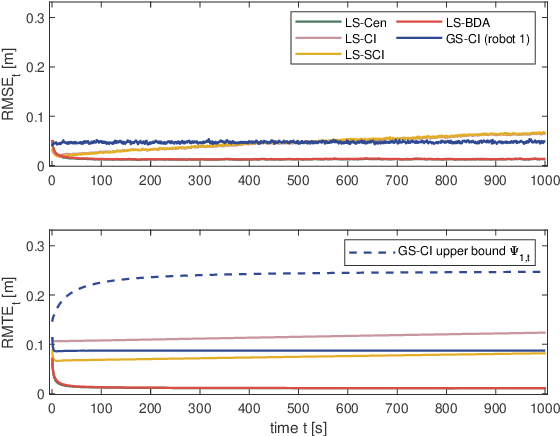
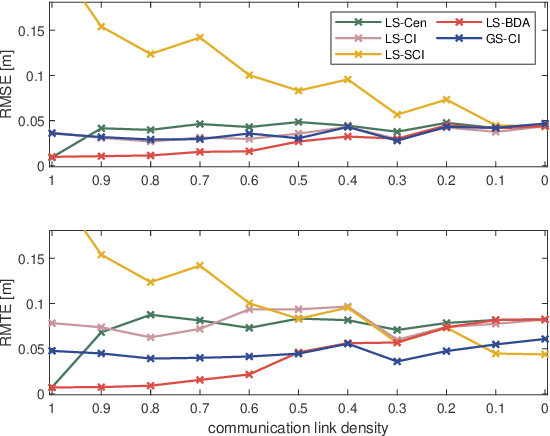
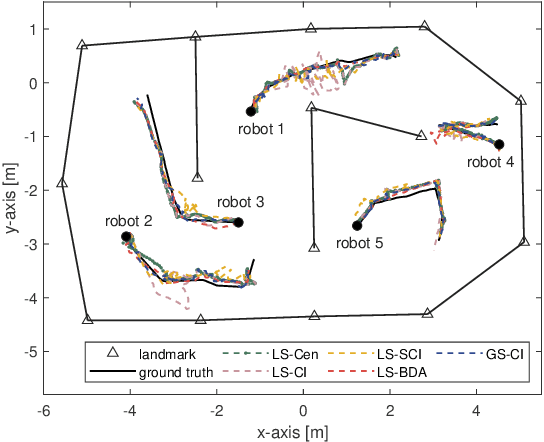
Cooperative localization is fundamental to autonomous multirobot systems, but most algorithms couple inter-robot communication with observation, making these algorithms susceptible to failures in both communication and observation steps. To enhance the resilience of multirobot cooperative localization algorithms in a distributed system, we use covariance intersection to formalize a localization algorithm with an explicit communication update and ensure estimation consistency at the same time. We investigate the covariance boundedness criterion of our algorithm with respect to communication and observation graphs, demonstrating provable localization performance under even sparse communications topologies. We substantiate the resilience of our algorithm as well as the boundedness analysis through experiments on simulated and benchmark physical data against varying communications connectivity and failure metrics. Especially when inter-robot communication is entirely blocked or partially unavailable, we demonstrate that our method is less affected and maintains desired performance compared to existing cooperative localization algorithms.
Localization Algorithm with Circular Representation in 2D and its Similarity to Mammalian Brains
Jan 25, 2019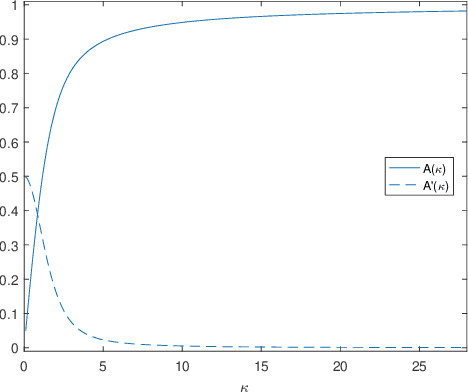
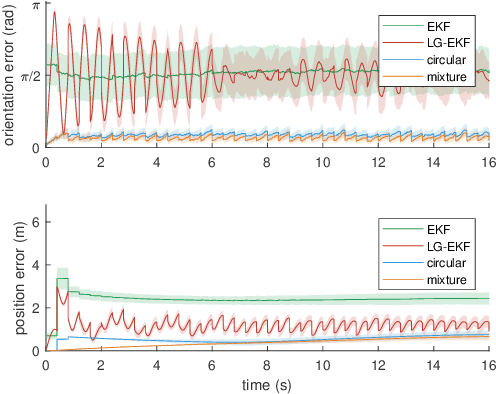
Extended Kalman filter (EKF) does not guarantee consistent mean and covariance under linearization, even though it is the main framework for robotic localization. While Lie group improves the modeling of the state space in localization, the EKF on Lie group still relies on the arbitrary Gaussian assumption in face of nonlinear models. We instead use von Mises filter for orientation estimation together with the conventional Kalman filter for position estimation, and thus we are able to characterize the first two moments of the state estimates. Since the proposed algorithm holds a solid probabilistic basis, it is fundamentally relieved from the inconsistency problem. Furthermore, we extend the localization algorithm to fully circular representation even for position, which is similar to grid patterns found in mammalian brains and in recurrent neural networks. The applicability of the proposed algorithms is substantiated not only by strong mathematical foundation but also by the comparison against other common localization methods.
TERSE-KF: Event-Trigger Diffusion Kalman Filter with Application to Localization and Time Synchronization
Jan 29, 2018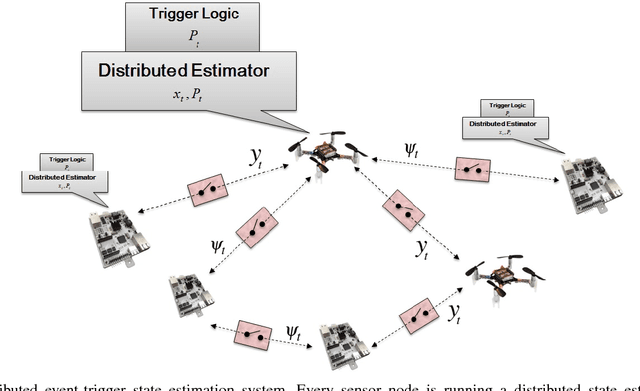
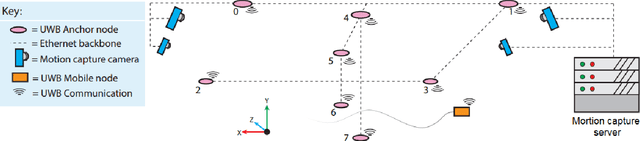

The performance of a distributed network state estimation problem depends strongly on collaborative signal processing, which often involves excessive communication and computation overheads on a resource-constrained sensor node. In this work, we approach the distributed estimation problem from the viewpoint of sensor networks to design a more efficient algorithm with reduced overheads, while still achieving the required performance bounds on the results. We propose an event-trigger diffusion Kalman filter, specifying when to communicate relative measurements between nodes based on a local signal indicative of the network error performance. This holistic approach leads to an energy-aware state estimation algorithm, which we then apply to the distributed simultaneous localization and time synchronization problem. We analytically prove that this algorithm leads to bounded error performance. Our algorithm is then evaluated on a physical testbed of a mobile quadrotor node moving through a network of stationary custom ultra-wideband wireless devices. We observe the trade-off between communication cost and error performance. For instance, we are able to save 86% of the communication overhead, while introducing 16% degradation in the performance.