 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTERSE-KF: Event-Trigger Diffusion Kalman Filter with Application to Localization and Time Synchronization
Paper and Code
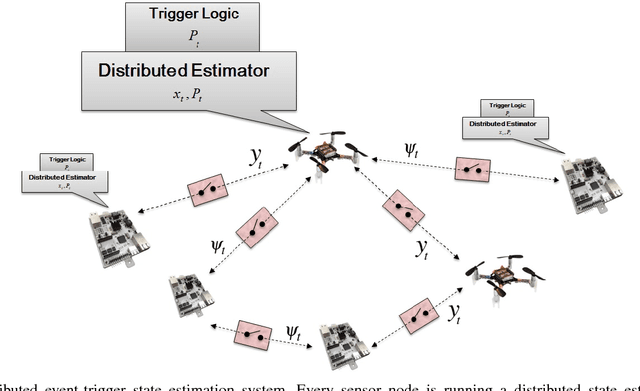
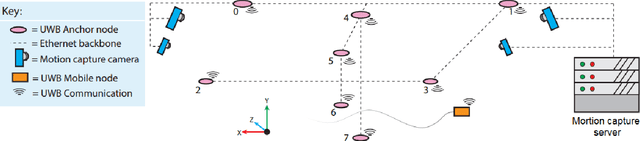
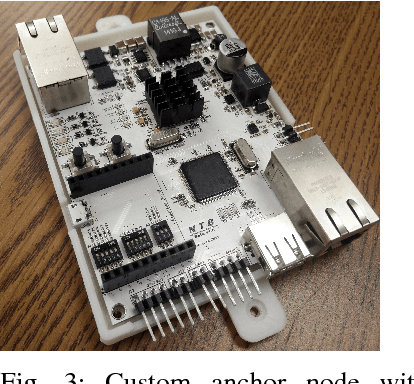

The performance of a distributed network state estimation problem depends strongly on collaborative signal processing, which often involves excessive communication and computation overheads on a resource-constrained sensor node. In this work, we approach the distributed estimation problem from the viewpoint of sensor networks to design a more efficient algorithm with reduced overheads, while still achieving the required performance bounds on the results. We propose an event-trigger diffusion Kalman filter, specifying when to communicate relative measurements between nodes based on a local signal indicative of the network error performance. This holistic approach leads to an energy-aware state estimation algorithm, which we then apply to the distributed simultaneous localization and time synchronization problem. We analytically prove that this algorithm leads to bounded error performance. Our algorithm is then evaluated on a physical testbed of a mobile quadrotor node moving through a network of stationary custom ultra-wideband wireless devices. We observe the trade-off between communication cost and error performance. For instance, we are able to save 86% of the communication overhead, while introducing 16% degradation in the performance.