 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadrature Oscillation System for Coordinated Motion in Crawling Origami Robot
Mar 24, 2026Origami-inspired robots offer rapid, accessible design and manufacture with diverse functionalities. In particular, origami robots without conventional electronics have the unique advantage of functioning in extreme environments such as ones with high radiation or large magnetic fields. However, the absence of sophisticated control systems limits these robots to simple autonomous behaviors. In our previous studies, we developed a printable, electronics-free, and self-sustained oscillator that generates simple complementary square-wave signals. Our study presents a quadrature oscillation system capable of generating four square-wave signals a quarter-cycle out of phase, enabling four distinct states. Such control signals are important in various engineering and robotics applications, such as orchestrating limb movements in bio-inspired robots. We demonstrate the practicality and value of this oscillation system by designing and constructing an origami crawling robot that utilizes the quadrature oscillator to achieve coordinated locomotion. Together, the oscillator and robot illustrate the potential for more complex control and functions in origami robotics, paving the way for more electronics-free, rapid-design origami robots with advanced autonomous behaviors.
Attentional Graph Meta-Learning for Indoor Localization Using Extremely Sparse Fingerprints
Apr 07, 2025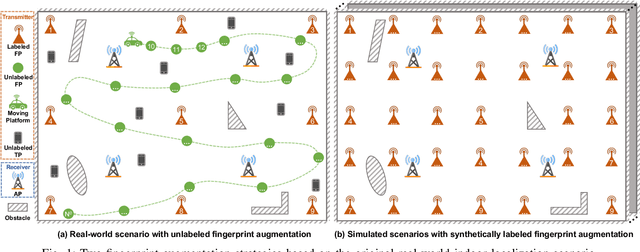
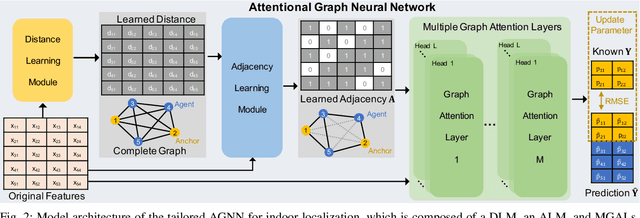
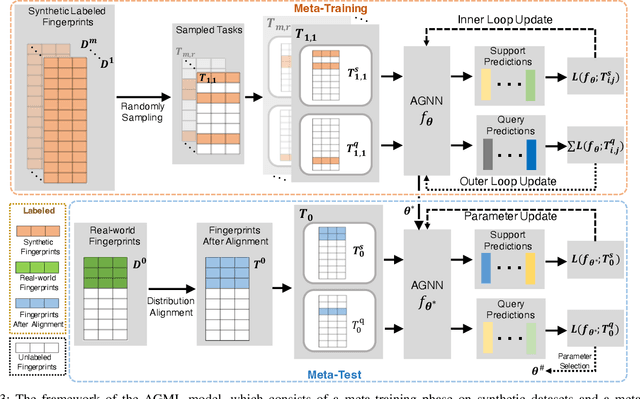
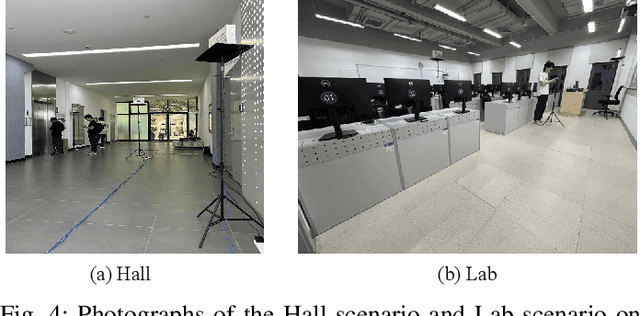
Fingerprint-based indoor localization is often labor-intensive due to the need for dense grids and repeated measurements across time and space. Maintaining high localization accuracy with extremely sparse fingerprints remains a persistent challenge. Existing benchmark methods primarily rely on the measured fingerprints, while neglecting valuable spatial and environmental characteristics. In this paper, we propose a systematic integration of an Attentional Graph Neural Network (AGNN) model, capable of learning spatial adjacency relationships and aggregating information from neighboring fingerprints, and a meta-learning framework that utilizes datasets with similar environmental characteristics to enhance model training. To minimize the labor required for fingerprint collection, we introduce two novel data augmentation strategies: 1) unlabeled fingerprint augmentation using moving platforms, which enables the semi-supervised AGNN model to incorporate information from unlabeled fingerprints, and 2) synthetic labeled fingerprint augmentation through environmental digital twins, which enhances the meta-learning framework through a practical distribution alignment, which can minimize the feature discrepancy between synthetic and real-world fingerprints effectively. By integrating these novel modules, we propose the Attentional Graph Meta-Learning (AGML) model. This novel model combines the strengths of the AGNN model and the meta-learning framework to address the challenges posed by extremely sparse fingerprints. To validate our approach, we collected multiple datasets from both consumer-grade WiFi devices and professional equipment across diverse environments. Extensive experiments conducted on both synthetic and real-world datasets demonstrate that the AGML model-based localization method consistently outperforms all baseline methods using sparse fingerprints across all evaluated metrics.
Z-Stack Scanning can Improve AI Detection of Mitosis: A Case Study of Meningiomas
Jan 27, 2025



Z-stack scanning is an emerging whole slide imaging technology that captures multiple focal planes alongside the z-axis of a glass slide. Because z-stacking can offer enhanced depth information compared to the single-layer whole slide imaging, this technology can be particularly useful in analyzing small-scaled histopathological patterns. However, its actual clinical impact remains debated with mixed results. To clarify this, we investigate the effect of z-stack scanning on artificial intelligence (AI) mitosis detection of meningiomas. With the same set of 22 Hematoxylin and Eosin meningioma glass slides scanned by three different digital pathology scanners, we tested the performance of three AI pipelines on both single-layer and z-stacked whole slide images (WSIs). Results showed that in all scanner-AI combinations, z-stacked WSIs significantly increased AI's sensitivity (+17.14%) on the mitosis detection with only a marginal impact on precision. Our findings provide quantitative evidence that highlights z-stack scanning as a promising technique for AI mitosis detection, paving the way for more reliable AI-assisted pathology workflows, which can ultimately benefit patient management.
Self-Deployable, Adaptive Soft Robots Based on Contracting-Cord Particle Jamming
Oct 03, 2024We developed a new class of soft locomotive robots that can self-assemble into a preprogrammed configuration and vary their stiffness afterward in a highly integrated, compact body using contracting-cord particle jamming (CCPJ). We demonstrate this with a tripod-shaped robot, TripodBot, consisting of three CCPJ-based legs attached to a central body. TripodBot is intrinsically soft and can be stored and transported in a compact configuration. On site, it can self-deploy and crawl in a slip-stick manner through the shape morphing of its legs; a simplified analytical model accurately captures the speed. The robot's adaptability is demonstrated by its ability to navigate tunnels as narrow as 61 percent of its deployed body width and ceilings as low as 31 percent of its freestanding height. Additionally, it can climb slopes up to 15 degrees, carry a load of 5 grams (2.4 times its weight), and bear a load 9429 times its weight.
Self-deployable contracting-cord metamaterials with tunable mechanical properties
Jul 08, 2024Recent advances in active materials and fabrication techniques have enabled the production of cyclically self-deployable metamaterials with an expanded functionality space. However, designing metamaterials that possess continuously tunable mechanical properties after self-deployment remains a challenge, notwithstanding its importance. Inspired by push puppets, we introduce an efficient design strategy to create reversibly self-deployable metamaterials with continuously tunable post-deployment stiffness and damping. Our metamaterial comprises contracting actuators threaded through beads with matching conical concavo-convex interfaces in networked chains. The slack network conforms to arbitrary shapes, but when actuated, it self-assembles into a preprogrammed configuration with beads gathered together. Further contraction of the actuators can dynamically tune the assembly's mechanical properties through the beads' particle jamming, while maintaining the overall structure with minimal change. We show that, after deployment, such metamaterials exhibit pronounced tunability in bending-dominated configurations: they can become more than 35 times stiffer and change their damping capability by over 50%. Through systematic analysis, we find that the beads'conical angle can introduce geometric nonlinearity, which has a major effect on the self-deployability and tunability of the metamaterial. Our work provides routes towards reversibly self-deployable, lightweight, and tunable metamaterials, with potential applications in soft robotics, reconfigurable architectures, and space engineering.
* 6 figures
Attentional Graph Neural Networks for Robust Massive Network Localization
Nov 28, 2023



Graph neural networks (GNNs) have gained significant popularity for classification tasks in machine learning, yet their applications to regression problems remain limited. Concurrently, attention mechanisms have emerged as powerful tools in sequential learning tasks. In this paper, we employ GNNs and attention mechanisms to address a classical but challenging nonlinear regression problem: network localization. We propose a novel GNN-based network localization method that achieves exceptional stability and accuracy in the presence of severe non-line-of-sight (NLOS) propagations, while eliminating the need for laborious offline calibration or NLOS identification. Extensive experimental results validate the effectiveness and high accuracy of our GNN-based localization model, particularly in challenging NLOS scenarios. However, the proposed GNN-based model exhibits limited flexibility, and its accuracy is highly sensitive to a specific hyperparameter that determines the graph structure. To address the limitations and extend the applicability of the GNN-based model to real scenarios, we introduce two attentional graph neural networks (AGNNs) that offer enhanced flexibility and the ability to automatically learn the optimal hyperparameter for each node. Experimental results confirm that the AGNN models are able to enhance localization accuracy, providing a promising solution for real-world applications. We also provide some analyses of the improved performance achieved by the AGNN models from the perspectives of dynamic attention and signal denoising characteristics.
Design of Bistable Soft Deployable Structures via a Kirigami-inspired Planar Fabrication Approach
Jan 22, 2023Fully soft bistable mechanisms have shown extensive applications ranging from soft robotics, wearable devices, and medical tools, to energy harvesting. However, the lack of design and fabrication methods that are easy and potentially scalable limits their further adoption into mainstream applications. Here a top-down planar approach is presented by introducing Kirigami-inspired engineering combined with a pre-stretching process. Using this method, Kirigami-Pre-stretched Substrate-Kirigami trilayered precursors are created in a planar manner; upon release, the strain mismatch -- due to the pre-stretching of substrate -- between layers would induce an out-of-plane buckling to achieve targeted three dimensional (3D) bistable structures. By combining experimental characterization, analytical modeling, and finite element simulation, the effect of the pattern size of Kirigami layers and pre-stretching on the geometry and stability of resulting 3D composites is explored. In addition, methods to realize soft bistable structures with arbitrary shapes and soft composites with multistable configurations are investigated, which could encourage further applications. Our method is demonstrated by using bistable soft Kirigami composites to construct two soft machines: (i) a bistable soft gripper that can gently grasp delicate objects with different shapes and sizes and (ii) a flytrap-inspired robot that can autonomously detect and capture objects.
An origami crawling robot driven by a folded self-sustained oscillator
Feb 07, 2022

Locomotive robots that do not rely on electronics and/or electromagnetic components will open up new perspectives and applications for robotics. However, these robots usually involve complicated and tedious fabrication processes, limiting their applications. Here, we develop an easy-to-fabricate crawling robot by embedding simple control and actuation into origami-inspired mechanisms through folding, eliminating the need for discrete electronics and transducers. Our crawling robot locomotes through directional friction propelled by an onboard origami self-sustained oscillator, which generates periodic actuation from a single source of constant power. The crawling robot is lightweight (~ 3.8 gram), ultra low-cost (~ US $1), nonmagnetic, and electronic-free; it may enable practical applications in extreme environments, e.g., large radiation or magnetic fields. The robot can be fabricated through a monolithic origami-inspired folding-based method with universal materials, i.e., sheet materials and conductive threads. This rapid design and fabrication approach enables the programmable assembly of various mechanisms within this manufacturing paradigm, laying the foundation for autonomous, untethered robots without requiring electronics.
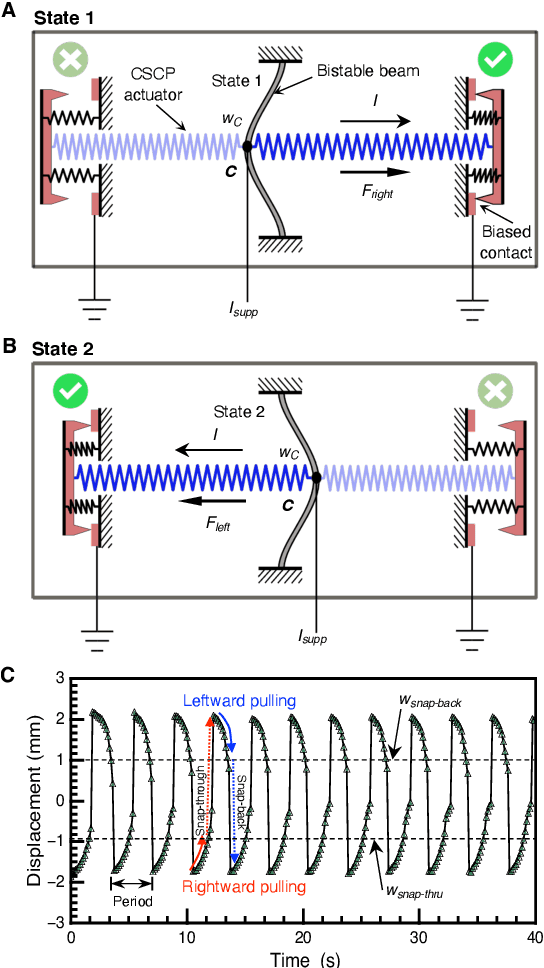
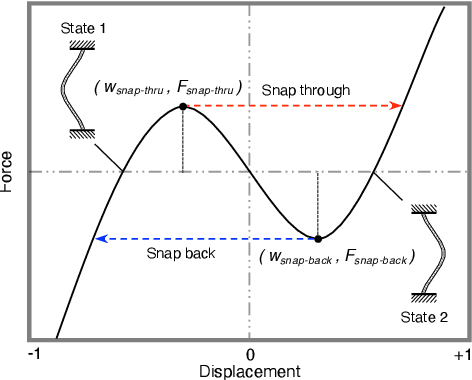
A cut-and-fold self-sustained compliant oscillator for autonomous actuation of origami-inspired robots
Aug 19, 2021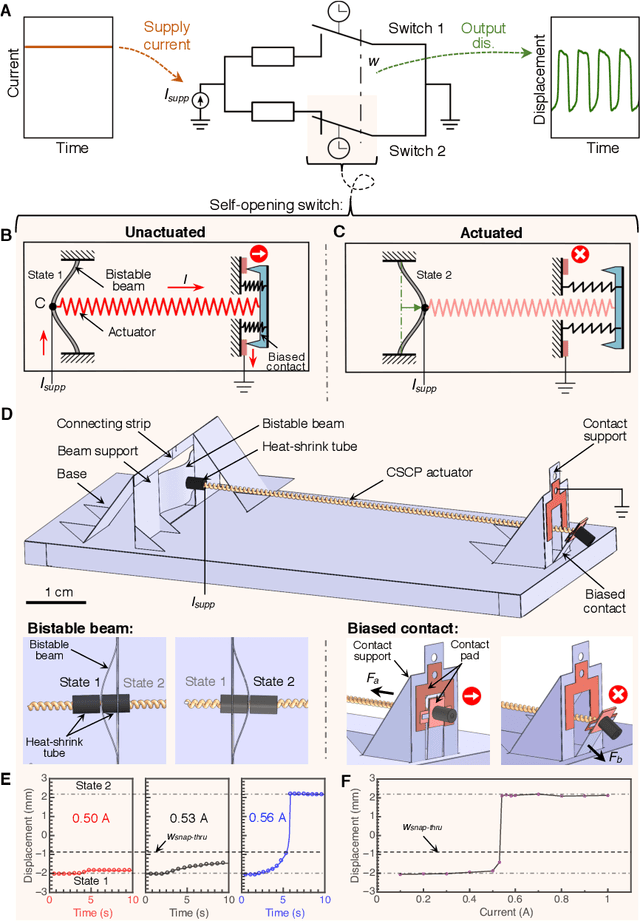
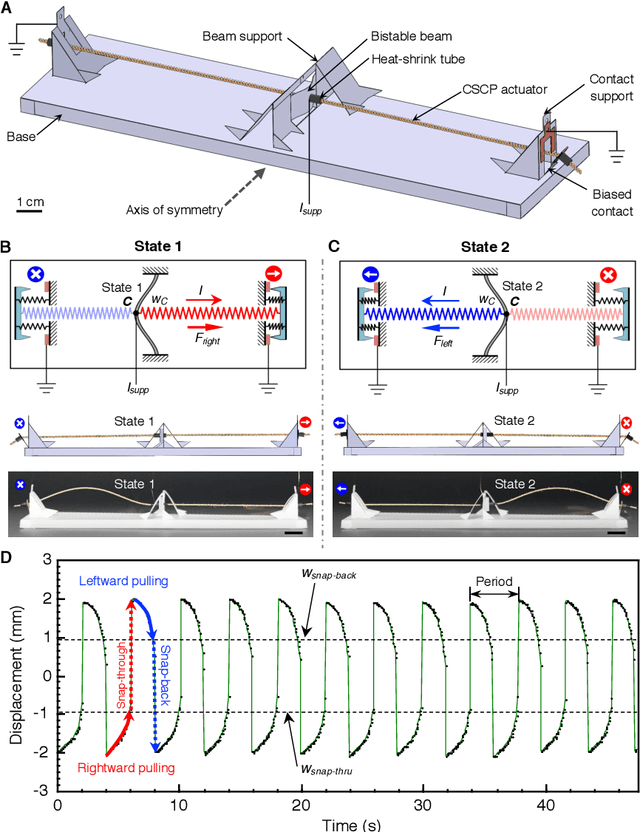

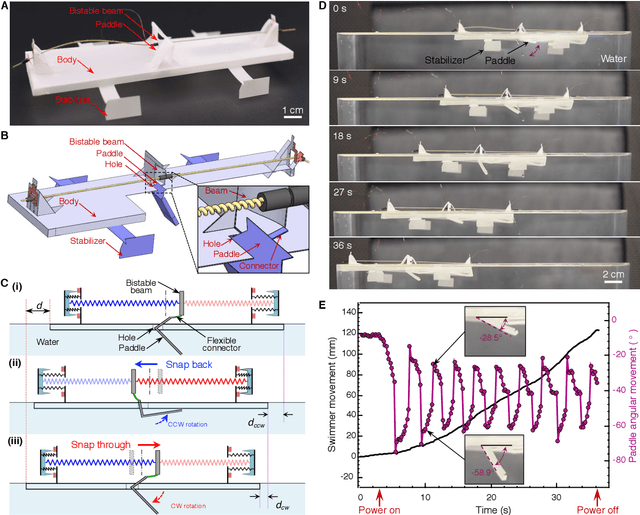
Origami-inspired robots are of particular interest given their potential for rapid and accessible design and fabrication of elegant designs and complex functionalities through cutting and folding of flexible 2D sheets or even strings, i.e.printable manufacturing. Yet, origami robots still require bulky, rigid components or electronics for actuation and control to accomplish tasks with reliability, programmability, ability to output substantial force, and durability, restricting their full potential. Here, we present a printable self-sustained compliant oscillator that generates periodic actuation using only constant electrical power, without discrete components or electronic control hardware. This oscillator is robust (9 out of 10 prototypes worked successfully on the first try), configurable (with tunable periods from 3 s to 12 s), powerful (can overcome hydrodynamic resistance to consistently propel a swimmer at ~1.6 body lengths/min), and long-lasting (~10^3 cycles); it enables driving macroscale devices with prescribed autonomous behaviors, e.g. locomotion and sequencing. This oscillator is also fully functional underwater and in high magnetic fields. Our analytical model characterizes essential parameters of the oscillation period, enabling programmable design of the oscillator. The printable oscillator can be integrated into origami-inspired systems seamlessly and monolithically, allowing rapid design and prototyping; the resulting integrated devices are lightweight, low-cost, compliant, electronic-free, and nonmagnetic, enabling practical applications in extreme areas. We demonstrate the functionalities of the oscillator with: (i) autonomous gliding of a printable swimmer, (ii) LED flashing, and (iii) fluid stirring. This work paves the way for realizing fully printable autonomous robots with a high integration of actuation and control.
Fabrication-aware Design for Furniture with Planar Pieces
Apr 11, 2021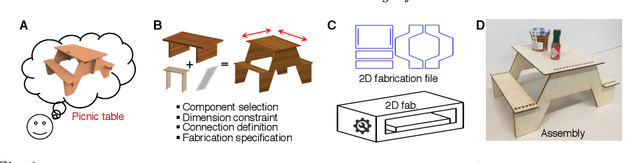
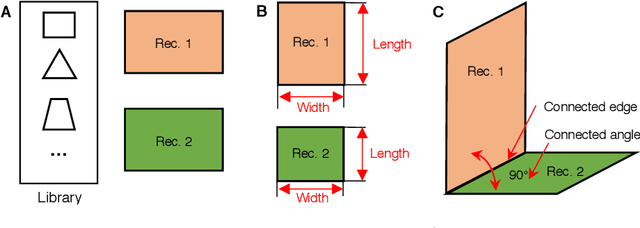
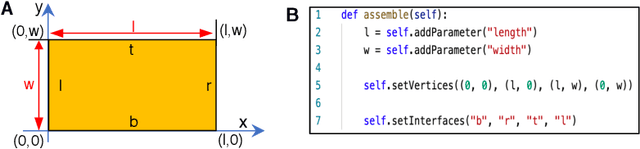
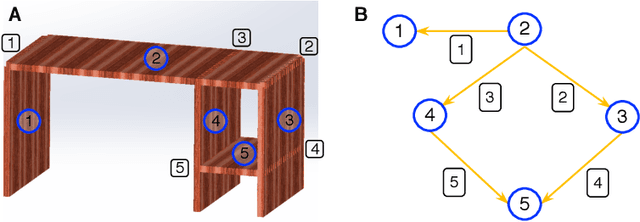
We propose a computational design tool to enable casual end-users to easily design, fabricate, and assemble flat-pack furniture with guaranteed manufacturability. Using our system, users select parameterized components from a library and constrain their dimensions. Then they abstractly specify connections among components to define the furniture. Once fabrication specifications (e.g. materials) designated, the mechanical implementation of the furniture is automatically handled by leveraging encoded domain expertise. Afterwards, the system outputs 3D models for visualization and mechanical drawings for fabrication. We demonstrate the validity of our approach by designing, fabricating, and assembling a variety of flat-pack (scaled) furniture on demand.