 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Control: Adjoint Learning Through Equilibrium Constraints
May 05, 2026Many physical AI tasks are governed by implicit equilibrium: an agent actuates a subset of degrees of freedom (boundary DoFs), while the remaining free DoFs settle by minimizing a total potential energy. Even seemingly basic tasks such as bending a deformable linear object (DLO) to a target shape can exhibit strongly nonlinear behavior due to multi-stability: the same boundary conditions may yield multiple equilibrium shapes depending on the actuation trajectory. However, learning and control in such systems is brittle because the actuation-to-configuration map is defined only implicitly, and naive backpropagation through iterative equilibrium solvers is memory- and compute-intensive. We propose Neural Control, a boundary-control framework that computes trajectory-dependent, memory-efficient proxy gradients by differentiating equilibrium conditions via an adjoint formulation, avoiding unrolling of solver iterations. To improve robustness over long horizons, we integrate these sensitivities into a receding-horizon MPC scheme that repeatedly re-anchors optimization to realized equilibria and mitigates basin-switching in multi-stable regimes. We evaluate Neural Control in simulation and on physical robots manipulating DLOs, and show improved performance over gradient-free baselines such as SPSA and CEM.
Your Vision-Language-Action Model Already Has Attention Heads For Path Deviation Detection
Mar 14, 2026Vision-Language-Action (VLA) models have demonstrated strong potential for predicting semantic actions in navigation tasks, demonstrating the ability to reason over complex linguistic instructions and visual contexts. However, they are fundamentally hindered by visual-reasoning hallucinations that lead to trajectory deviations. Addressing this issue has conventionally required training external critic modules or relying on complex uncertainty heuristics. In this work, we discover that monitoring a few attention heads within a frozen VLA model can accurately detect path deviations without incurring additional computational overhead. We refer to these heads, which inherently capture the spatiotemporal causality between historical visual sequences and linguistic instructions, as Navigation Heads. Using these heads, we propose an intuitive, training-free anomaly-detection framework that monitors their signals to detect hallucinations in real time. Surprisingly, among over a thousand attention heads, a combination of just three is sufficient to achieve a 44.6 % deviation detection rate with a low false-positive rate of 11.7 %. Furthermore, upon detecting a deviation, we bypass the heavy VLA model and trigger a lightweight Reinforcement Learning (RL) policy to safely execute a shortest-path rollback. By integrating this entire detection-to-recovery pipeline onto a physical robot, we demonstrate its practical robustness. All source code will be publicly available.
Py-DiSMech: A Scalable and Efficient Framework for Discrete Differential Geometry-Based Modeling and Control of Soft Robots
Dec 20, 2025High-fidelity simulation has become essential to the design and control of soft robots, where large geometric deformations and complex contact interactions challenge conventional modeling tools. Recent advances in the field demand simulation frameworks that combine physical accuracy, computational scalability, and seamless integration with modern control and optimization pipelines. In this work, we present Py-DiSMech, a Python-based, open-source simulation framework for modeling and control of soft robotic structures grounded in the principles of Discrete Differential Geometry (DDG). By discretizing geometric quantities such as curvature and strain directly on meshes, Py-DiSMech captures the nonlinear deformation of rods, shells, and hybrid structures with high fidelity and reduced computational cost. The framework introduces (i) a fully vectorized NumPy implementation achieving order-of-magnitude speed-ups over existing geometry-based simulators; (ii) a penalty-energy-based fully implicit contact model that supports rod-rod, rod-shell, and shell-shell interactions; (iii) a natural-strain-based feedback-control module featuring a proportional-integral (PI) controller for shape regulation and trajectory tracking; and (iv) a modular, object-oriented software design enabling user-defined elastic energies, actuation schemes, and integration with machine-learning libraries. Benchmark comparisons demonstrate that Py-DiSMech substantially outperforms the state-of-the-art simulator Elastica in computational efficiency while maintaining physical accuracy. Together, these features establish Py-DiSMech as a scalable, extensible platform for simulation-driven design, control validation, and sim-to-real research in soft robotics.
DePT3R: Joint Dense Point Tracking and 3D Reconstruction of Dynamic Scenes in a Single Forward Pass
Dec 15, 2025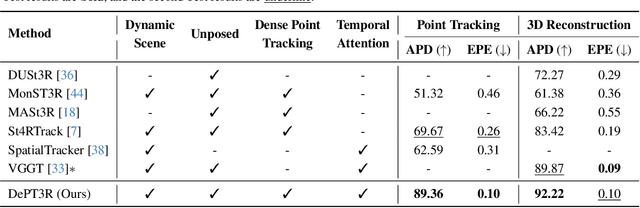
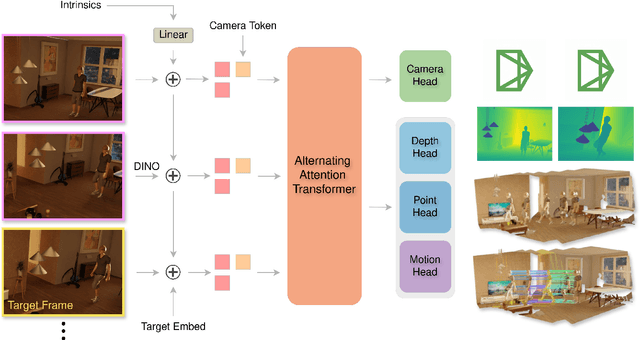
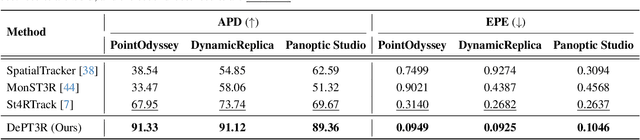
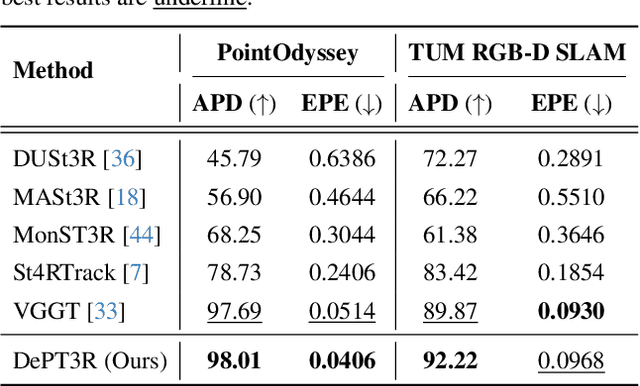
Current methods for dense 3D point tracking in dynamic scenes typically rely on pairwise processing, require known camera poses, or assume a temporal ordering to input frames, constraining their flexibility and applicability. Additionally, recent advances have successfully enabled efficient 3D reconstruction from large-scale, unposed image collections, underscoring opportunities for unified approaches to dynamic scene understanding. Motivated by this, we propose DePT3R, a novel framework that simultaneously performs dense point tracking and 3D reconstruction of dynamic scenes from multiple images in a single forward pass. This multi-task learning is achieved by extracting deep spatio-temporal features with a powerful backbone and regressing pixel-wise maps with dense prediction heads. Crucially, DePT3R operates without requiring camera poses, substantially enhancing its adaptability and efficiency-especially important in dynamic environments with rapid changes. We validate DePT3R on several challenging benchmarks involving dynamic scenes, demonstrating strong performance and significant improvements in memory efficiency over existing state-of-the-art methods. Data and codes are available via the open repository: https://github.com/StructuresComp/DePT3R
HiddenObject: Modality-Agnostic Fusion for Multimodal Hidden Object Detection
Aug 28, 2025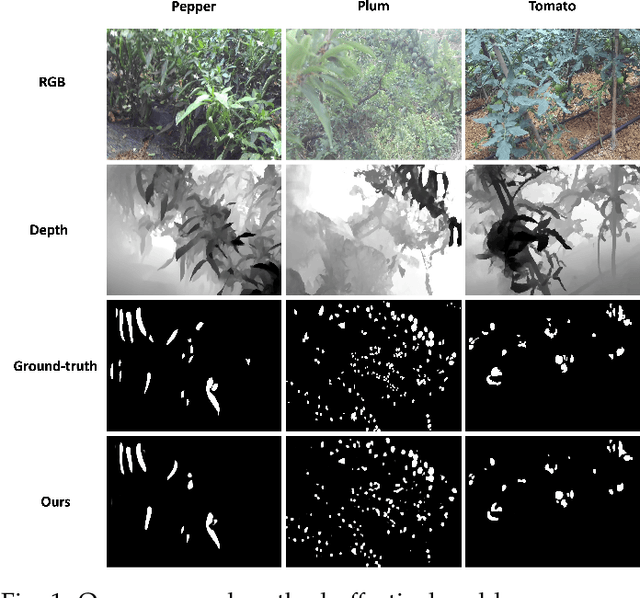
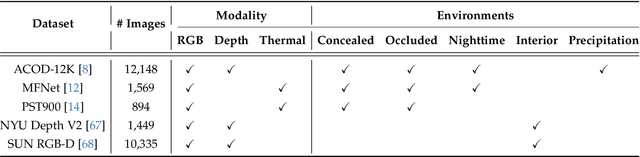
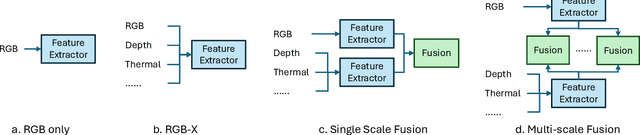
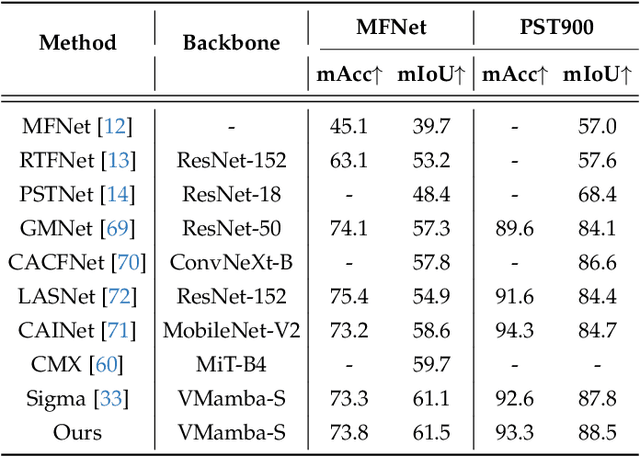
Detecting hidden or partially concealed objects remains a fundamental challenge in multimodal environments, where factors like occlusion, camouflage, and lighting variations significantly hinder performance. Traditional RGB-based detection methods often fail under such adverse conditions, motivating the need for more robust, modality-agnostic approaches. In this work, we present HiddenObject, a fusion framework that integrates RGB, thermal, and depth data using a Mamba-based fusion mechanism. Our method captures complementary signals across modalities, enabling enhanced detection of obscured or camouflaged targets. Specifically, the proposed approach identifies modality-specific features and fuses them in a unified representation that generalizes well across challenging scenarios. We validate HiddenObject across multiple benchmark datasets, demonstrating state-of-the-art or competitive performance compared to existing methods. These results highlight the efficacy of our fusion design and expose key limitations in current unimodal and na\"ive fusion strategies. More broadly, our findings suggest that Mamba-based fusion architectures can significantly advance the field of multimodal object detection, especially under visually degraded or complex conditions.
AgriChrono: A Multi-modal Dataset Capturing Crop Growth and Lighting Variability with a Field Robot
Aug 26, 2025Existing datasets for precision agriculture have primarily been collected in static or controlled environments such as indoor labs or greenhouses, often with limited sensor diversity and restricted temporal span. These conditions fail to reflect the dynamic nature of real farmland, including illumination changes, crop growth variation, and natural disturbances. As a result, models trained on such data often lack robustness and generalization when applied to real-world field scenarios. In this paper, we present AgriChrono, a novel robotic data collection platform and multi-modal dataset designed to capture the dynamic conditions of real-world agricultural environments. Our platform integrates multiple sensors and enables remote, time-synchronized acquisition of RGB, Depth, LiDAR, and IMU data, supporting efficient and repeatable long-term data collection across varying illumination and crop growth stages. We benchmark a range of state-of-the-art 3D reconstruction models on the AgriChrono dataset, highlighting the difficulty of reconstruction in real-world field environments and demonstrating its value as a research asset for advancing model generalization under dynamic conditions. The code and dataset are publicly available at: https://github.com/StructuresComp/agri-chrono
Reconstruction Using the Invisible: Intuition from NIR and Metadata for Enhanced 3D Gaussian Splatting
Aug 20, 2025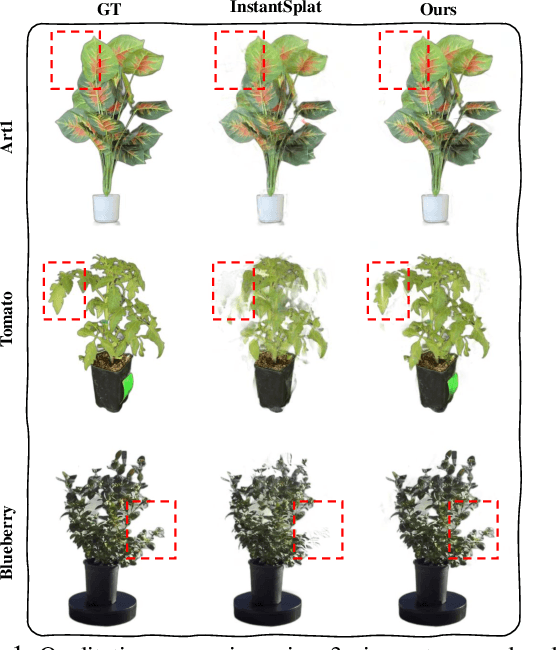
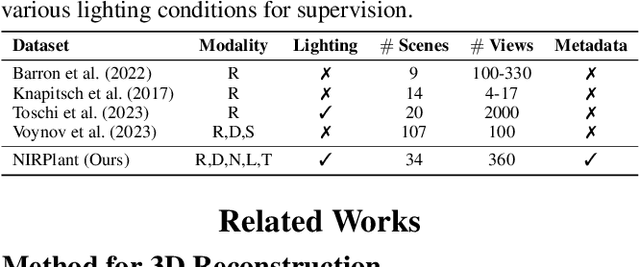
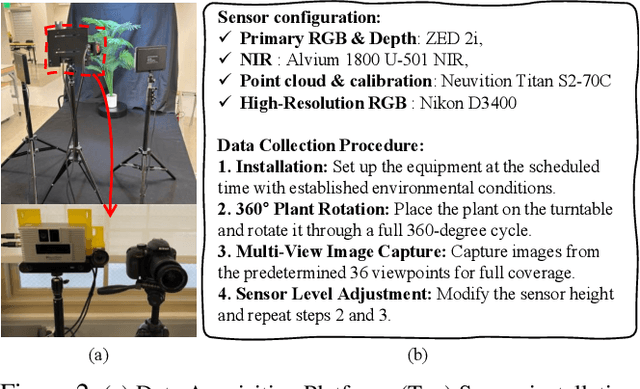
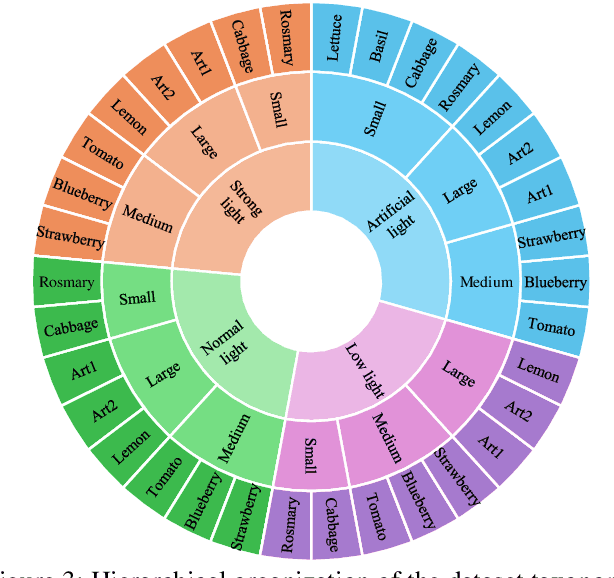
While 3D Gaussian Splatting (3DGS) has rapidly advanced, its application in agriculture remains underexplored. Agricultural scenes present unique challenges for 3D reconstruction methods, particularly due to uneven illumination, occlusions, and a limited field of view. To address these limitations, we introduce \textbf{NIRPlant}, a novel multimodal dataset encompassing Near-Infrared (NIR) imagery, RGB imagery, textual metadata, Depth, and LiDAR data collected under varied indoor and outdoor lighting conditions. By integrating NIR data, our approach enhances robustness and provides crucial botanical insights that extend beyond the visible spectrum. Additionally, we leverage text-based metadata derived from vegetation indices, such as NDVI, NDWI, and the chlorophyll index, which significantly enriches the contextual understanding of complex agricultural environments. To fully exploit these modalities, we propose \textbf{NIRSplat}, an effective multimodal Gaussian splatting architecture employing a cross-attention mechanism combined with 3D point-based positional encoding, providing robust geometric priors. Comprehensive experiments demonstrate that \textbf{NIRSplat} outperforms existing landmark methods, including 3DGS, CoR-GS, and InstantSplat, highlighting its effectiveness in challenging agricultural scenarios. The code and dataset are publicly available at: https://github.com/StructuresComp/3D-Reconstruction-NIR
Emergent morphogenesis via planar fabrication enabled by a reduced model of composites
Aug 11, 2025The ability to engineer complex three-dimensional shapes from planar sheets with precise, programmable control underpins emerging technologies in soft robotics, reconfigurable devices, and functional materials. Here, we present a reduced-order numerical and experimental framework for a bilayer system consisting of a stimuli-responsive thermoplastic sheet (Shrinky Dink) bonded to a kirigami-patterned, inert plastic layer. Upon uniform heating, the active layer contracts while the patterned layer constrains in-plane stretch but allows out-of-plane bending, yielding programmable 3D morphologies from simple planar precursors. Our approach enables efficient computational design and scalable manufacturing of 3D forms with a single-layer reduced model that captures the coupled mechanics of stretching and bending. Unlike traditional bilayer modeling, our framework collapses the multilayer composite into a single layer of nodes and elements, reducing the degrees of freedom and enabling simulation on a 2D geometry. This is achieved by introducing a novel energy formulation that captures the coupling between in-plane stretch mismatch and out-of-plane bending - extending beyond simple isotropic linear elastic models. Experimentally, we establish a fully planar, repeatable fabrication protocol using a stimuli-responsive thermoplastic and a laser-cut inert plastic layer. The programmed strain mismatch drives an array of 3D morphologies, such as bowls, canoes, and flower petals, all verified by both simulation and physical prototypes.
MAT-DiSMech: A Discrete Differential Geometry-based Computational Tool for Simulation of Rods, Shells, and Soft Robots
Apr 24, 2025Accurate and efficient simulation tools are essential in robotics, enabling the visualization of system dynamics and the validation of control laws before committing resources to physical experimentation. Developing physically accurate simulation tools is particularly challenging in soft robotics, largely due to the prevalence of geometrically nonlinear deformation. A variety of robot simulators tackle this challenge by using simplified modeling techniques -- such as lumped mass models -- which lead to physical inaccuracies in real-world applications. On the other hand, high-fidelity simulation methods for soft structures, like finite element analysis, offer increased accuracy but lead to higher computational costs. In light of this, we present a Discrete Differential Geometry-based simulator that provides a balance between physical accuracy and computational speed. Building on an extensive body of research on rod and shell-based representations of soft robots, our tool provides a pathway to accurately model soft robots in a computationally tractable manner. Our open-source MATLAB-based framework is capable of simulating the deformations of rods, shells, and their combinations, primarily utilizing implicit integration techniques. The software design is modular for the user to customize the code, for example, add new external forces and impose custom boundary conditions. The implementations for prevalent forces encountered in robotics, including gravity, contact, kinetic and viscous friction, and aerodynamic drag, have been provided. We provide several illustrative examples that showcase the capabilities and validate the physical accuracy of the simulator. The open-source code is available at https://github.com/StructuresComp/dismech-matlab. We anticipate that the proposed simulator can serve as an effective digital twin tool, enhancing the Sim2Real pathway in soft robotics research.
Modeling, Characterization, and Control of Bacteria-inspired Bi-flagellated Mechanism with Tumbling
Jun 30, 2023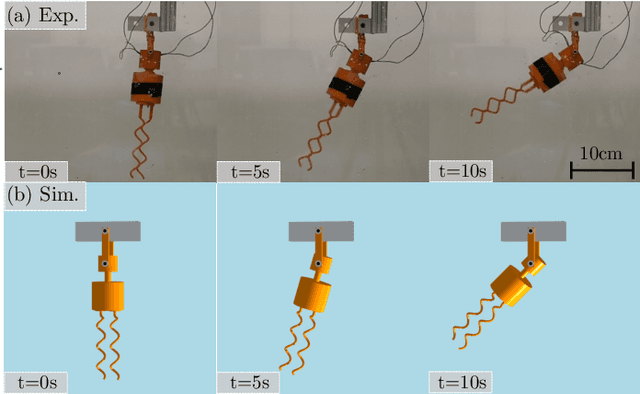
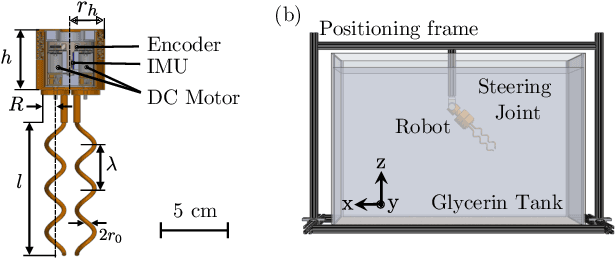
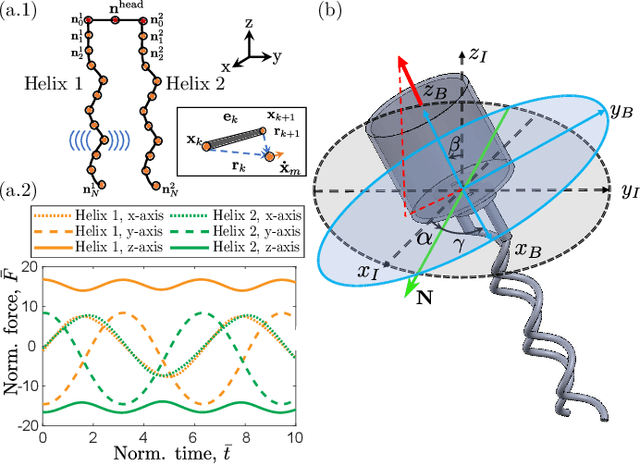
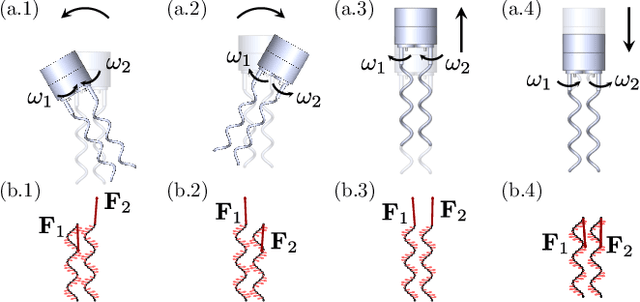
Multi-flagellated bacteria utilize the hydrodynamic interaction between their filamentary tails, known as flagella, to swim and change their swimming direction in low Reynolds number flow. This interaction, referred to as bundling and tumbling, is often overlooked in simplified hydrodynamic models such as Resistive Force Theories (RFT). However, for the development of efficient and steerable robots inspired by bacteria, it becomes crucial to exploit this interaction. In this paper, we present the construction of a macroscopic bio-inspired robot featuring two rigid flagella arranged as right-handed helices, along with a cylindrical head. By rotating the flagella in opposite directions, the robot's body can reorient itself through repeatable and controllable tumbling. To accurately model this bi-flagellated mechanism in low Reynolds flow, we employ a coupling of rigid body dynamics and the method of Regularized Stokeslet Segments (RSS). Unlike RFT, RSS takes into account the hydrodynamic interaction between distant filamentary structures. Furthermore, we delve into the exploration of the parameter space to optimize the propulsion and torque of the system. To achieve the desired reorientation of the robot, we propose a tumble control scheme that involves modulating the rotation direction and speed of the two flagella. By implementing this scheme, the robot can effectively reorient itself to attain the desired attitude. Notably, the overall scheme boasts a simplified design and control as it only requires two control inputs. With our macroscopic framework serving as a foundation, we envision the eventual miniaturization of this technology to construct mobile and controllable micro-scale bacterial robots.