 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeasure Anything: Real-time, Multi-stage Vision-based Dimensional Measurement using Segment Anything
Dec 04, 2024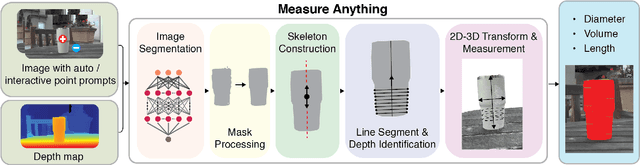
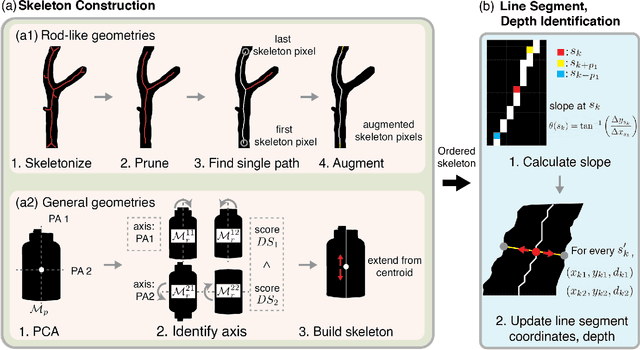
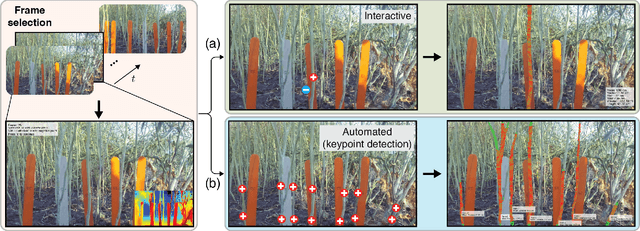
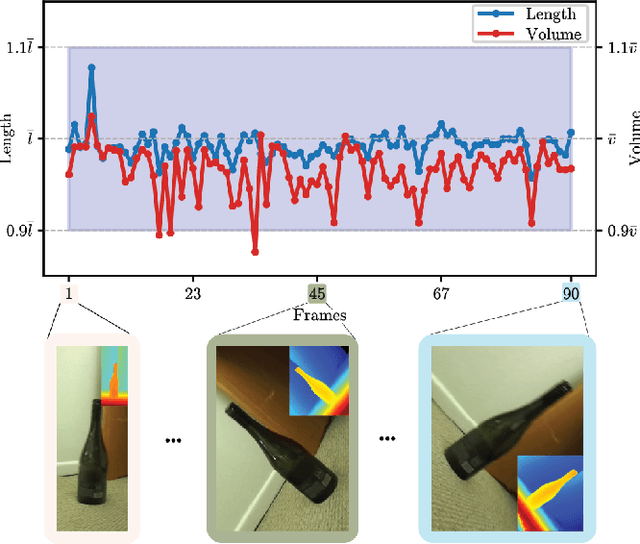
We present Measure Anything, a comprehensive vision-based framework for dimensional measurement of objects with circular cross-sections, leveraging the Segment Anything Model (SAM). Our approach estimates key geometric features -- including diameter, length, and volume -- for rod-like geometries with varying curvature and general objects with constant skeleton slope. The framework integrates segmentation, mask processing, skeleton construction, and 2D-3D transformation, packaged in a user-friendly interface. We validate our framework by estimating the diameters of Canola stems -- collected from agricultural fields in North Dakota -- which are thin and non-uniform, posing challenges for existing methods. Measuring its diameters is critical, as it is a phenotypic traits that correlates with the health and yield of Canola crops. This application also exemplifies the potential of Measure Anything, where integrating intelligent models -- such as keypoint detection -- extends its scalability to fully automate the measurement process for high-throughput applications. Furthermore, we showcase its versatility in robotic grasping, leveraging extracted geometric features to identify optimal grasp points.
Agronav: Autonomous Navigation Framework for Agricultural Robots and Vehicles using Semantic Segmentation and Semantic Line Detection
Apr 10, 2023



The successful implementation of vision-based navigation in agricultural fields hinges upon two critical components: 1) the accurate identification of key components within the scene, and 2) the identification of lanes through the detection of boundary lines that separate the crops from the traversable ground. We propose Agronav, an end-to-end vision-based autonomous navigation framework, which outputs the centerline from the input image by sequentially processing it through semantic segmentation and semantic line detection models. We also present Agroscapes, a pixel-level annotated dataset collected across six different crops, captured from varying heights and angles. This ensures that the framework trained on Agroscapes is generalizable across both ground and aerial robotic platforms. Codes, models and dataset will be released at \href{https://github.com/shivamkumarpanda/agronav}{github.com/shivamkumarpanda/agronav}.