 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-Inspired Pneumatic Modular Actuator for Peristaltic Transport
Dec 06, 2024



While its biological significance is well-documented, its application in soft robotics, particularly for the transport of fragile and irregularly shaped objects, remains underexplored. This study presents a modular soft robotic actuator system that addresses these challenges through a scalable, adaptable, and repairable framework, offering a cost-effective solution for versatile applications. The system integrates optimized donut-shaped actuation modules and utilizes real-time pressure feedback for synchronized operation, ensuring efficient object grasping and transport without relying on intricate sensing or control algorithms. Experimental results validate the system`s ability to accommodate objects with varying geometries and material characteristics, balancing robustness with flexibility. This work advances the principles of peristaltic actuation, establishing a pathway for safely and reliably manipulating delicate materials in a range of scenarios.
Measure Anything: Real-time, Multi-stage Vision-based Dimensional Measurement using Segment Anything
Dec 04, 2024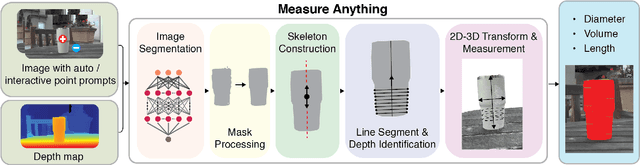
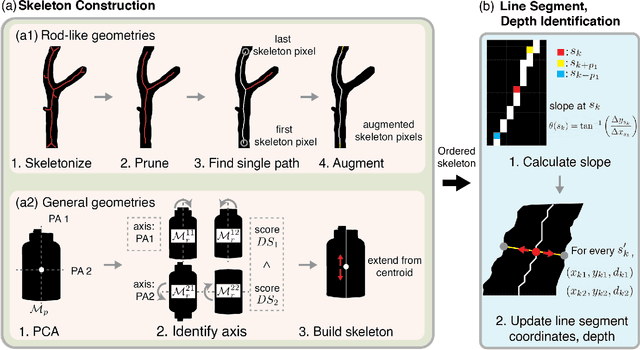
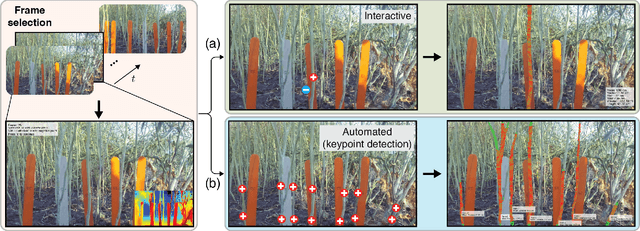
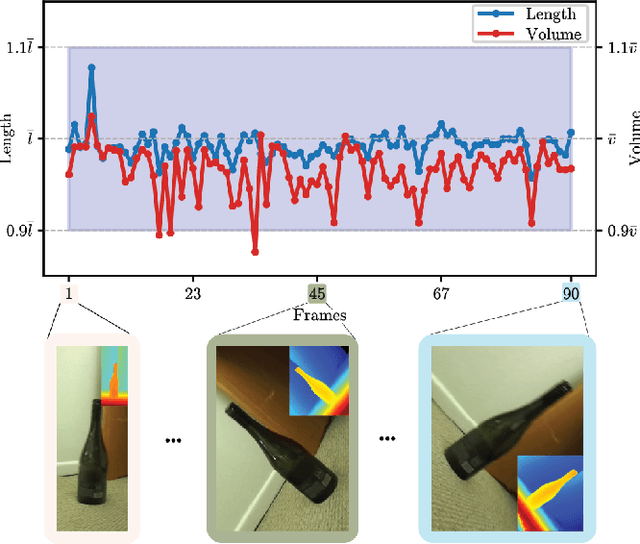
We present Measure Anything, a comprehensive vision-based framework for dimensional measurement of objects with circular cross-sections, leveraging the Segment Anything Model (SAM). Our approach estimates key geometric features -- including diameter, length, and volume -- for rod-like geometries with varying curvature and general objects with constant skeleton slope. The framework integrates segmentation, mask processing, skeleton construction, and 2D-3D transformation, packaged in a user-friendly interface. We validate our framework by estimating the diameters of Canola stems -- collected from agricultural fields in North Dakota -- which are thin and non-uniform, posing challenges for existing methods. Measuring its diameters is critical, as it is a phenotypic traits that correlates with the health and yield of Canola crops. This application also exemplifies the potential of Measure Anything, where integrating intelligent models -- such as keypoint detection -- extends its scalability to fully automate the measurement process for high-throughput applications. Furthermore, we showcase its versatility in robotic grasping, leveraging extracted geometric features to identify optimal grasp points.
DisMech: A Discrete Differential Geometry-based Physical Simulator for Soft Robots and Structures
Nov 29, 2023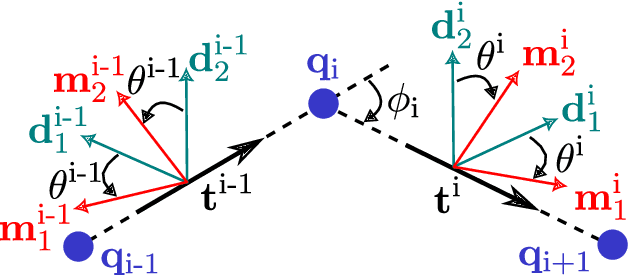

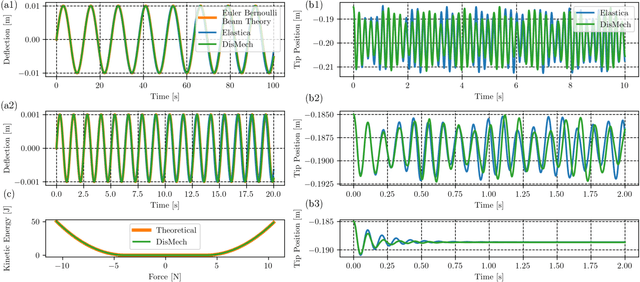
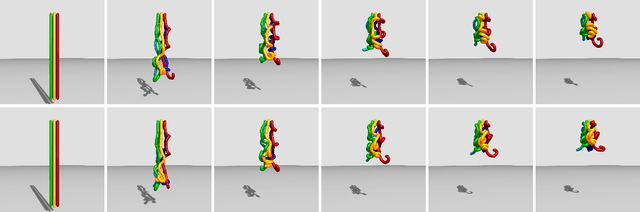
Fast, accurate, and generalizable simulations are a key enabler of modern advances in robot design and control. However, existing simulation frameworks in robotics either model rigid environments and mechanisms only, or if they include flexible or soft structures, suffer significantly in one or more of these performance areas. To close this "sim2real" gap, we introduce DisMech, a simulation environment that models highly dynamic motions of rod-like soft continuum robots and structures, quickly and accurately, with arbitrary connections between them. Our methodology combines a fully implicit discrete differential geometry-based physics solver with fast and accurate contact handling, all in an intuitive software interface. Crucially, we propose a gradient descent approach to easily map the motions of hardware robot prototypes to control inputs in DisMech. We validate DisMech through several highly-nuanced soft robot simulations while demonstrating an order of magnitude speed increase over previous state of the art. Our real2sim validation shows high physical accuracy versus hardware, even with complicated soft actuation mechanisms such as shape memory alloy wires. With its low computational cost, physical accuracy, and ease of use, DisMech can accelerate translation of sim-based control for both soft robotics and deformable object manipulation.
mBEST: Realtime Deformable Linear Object Detection Through Minimal Bending Energy Skeleton Pixel Traversals
Feb 18, 2023Robotic manipulation of deformable materials is a challenging task that often requires realtime visual feedback. This is especially true for deformable linear objects (DLOs) or "rods", whose slender and flexible structures make proper tracking and detection nontrivial. To address this challenge, we present mBEST, a robust algorithm for the realtime detection of DLOs that is capable of producing an ordered pixel sequence of each DLO's centerline along with segmentation masks. Our algorithm obtains a binary mask of the DLOs and then thins it to produce a skeleton pixel representation. After refining the skeleton to ensure topological correctness, the pixels are traversed to generate paths along each unique DLO. At the core of our algorithm, we postulate that intersections can be robustly handled by choosing the combination of paths that minimizes the cumulative bending energy of the DLO(s). We show that this simple and intuitive formulation outperforms the state-of-the-art methods for detecting DLOs with large numbers of sporadic crossings and curvatures with high variance. Furthermore, our method achieves a significant performance improvement of approximately 40 FPS compared to the 15 FPS of prior algorithms, which enables realtime applications.
Preemptive Motion Planning for Human-to-Robot Indirect Placement Handovers
Mar 01, 2022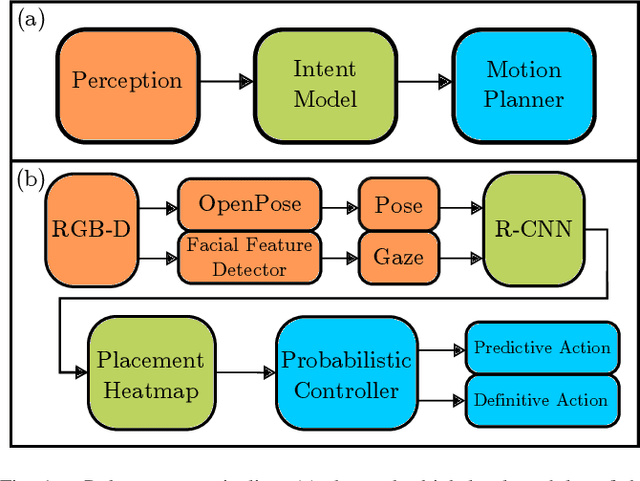
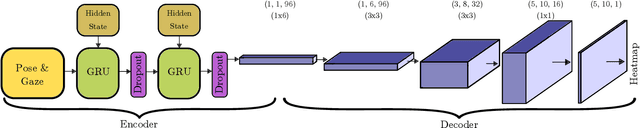
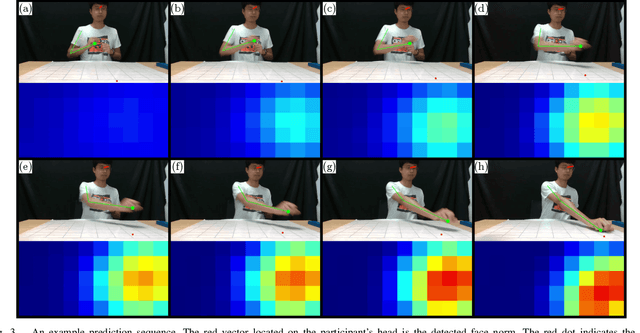
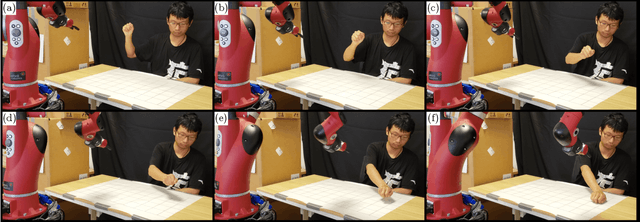
As technology advances, the need for safe, efficient, and collaborative human-robot-teams has become increasingly important. One of the most fundamental collaborative tasks in any setting is the object handover. Human-to-robot handovers can take either of two approaches: (1) direct hand-to-hand or (2) indirect hand-to-placement-to-pick-up. The latter approach ensures minimal contact between the human and robot but can also result in increased idle time due to having to wait for the object to first be placed down on a surface. To minimize such idle time, the robot must preemptively predict the human intent of where the object will be placed. Furthermore, for the robot to preemptively act in any sort of productive manner, predictions and motion planning must occur in real-time. We introduce a novel prediction-planning pipeline that allows the robot to preemptively move towards the human agent's intended placement location using gaze and gestures as model inputs. In this paper, we investigate the performance and drawbacks of our early intent predictor-planner as well as the practical benefits of using such a pipeline through a human-robot case study.
A Low-cost Robot with Autonomous Recharge and Navigation for Weed Control in Fields with Narrow Row Spacing
Dec 03, 2021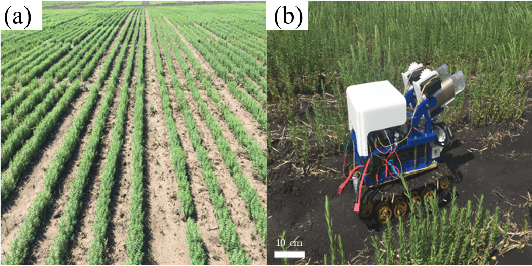
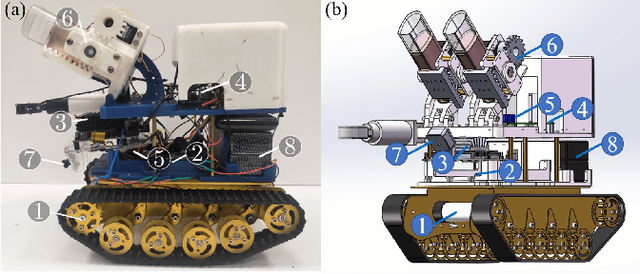
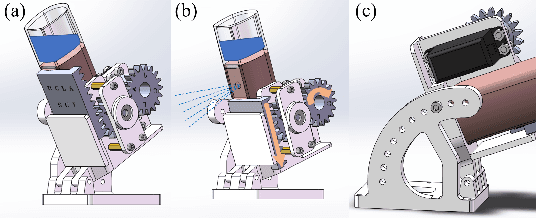
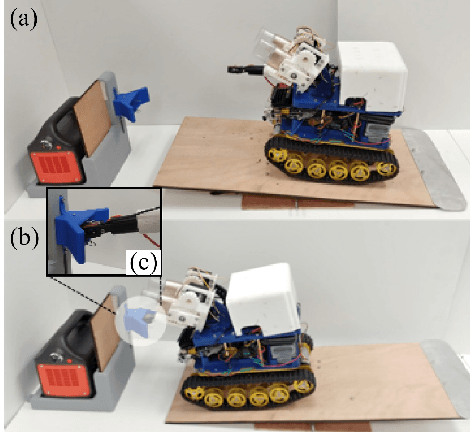
Modern herbicide application in agricultural settings typically relies on either large scale sprayers that dispense herbicide over crops and weeds alike or portable sprayers that require labor intensive manual operation. The former method results in overuse of herbicide and reduction in crop yield while the latter is often untenable in large scale operations. This paper presents the first fully autonomous robot for weed management for row crops capable of computer vision based navigation, weed detection, complete field coverage, and automatic recharge for under \$400. The target application is autonomous inter-row weed control in crop fields, e.g. flax and canola, where the spacing between croplines is as small as one foot. The proposed robot is small enough to pass between croplines at all stages of plant growth while detecting weeds and spraying herbicide. A recharging system incorporates newly designed robotic hardware, a ramp, a robotic charging arm, and a mobile charging station. An integrated vision algorithm is employed to assist with charger alignment effectively. Combined, they enable the robot to work continuously in the field without access to electricity. In addition, a color-based contour algorithm combined with preprocessing techniques is applied for robust navigation relying on the input from the onboard monocular camera. Incorporating such compact robots into farms could help automate weed control, even during late stages of growth, and reduce herbicide use by targeting weeds with precision. The robotic platform is field-tested in the flaxseed fields of North Dakota.
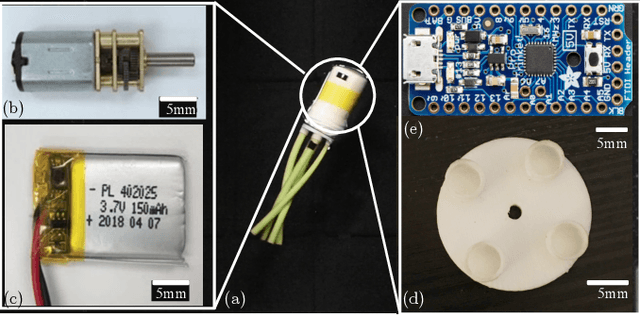
Bacteria Inspired Multi-Flagella Propelled Soft Robot at Low Reynolds Number
Nov 29, 2021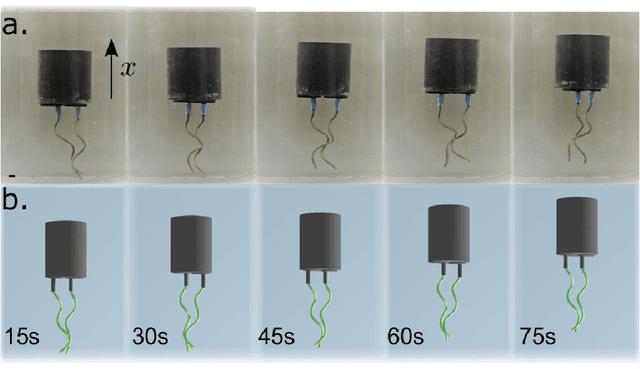

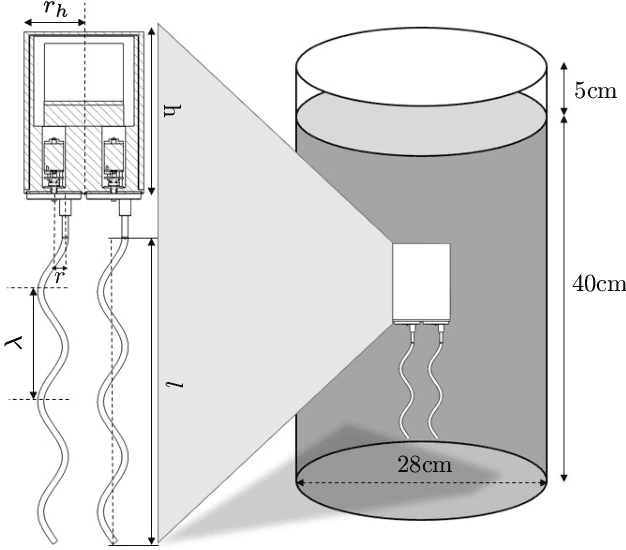
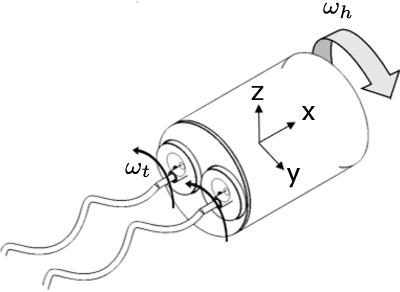
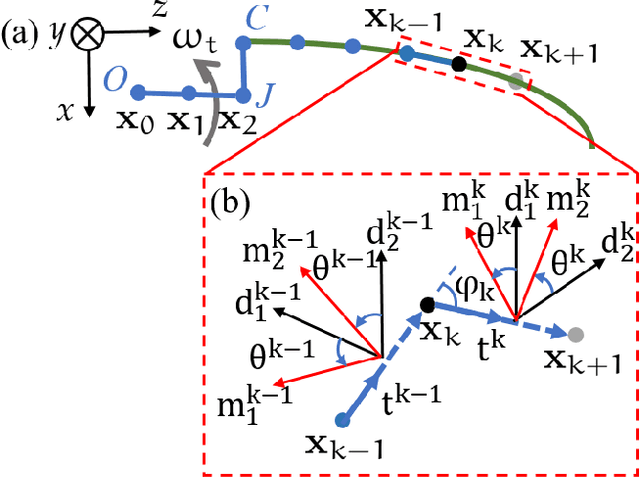
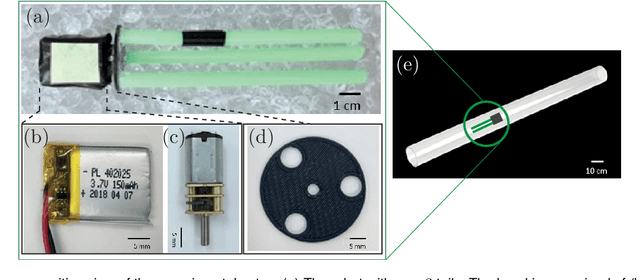
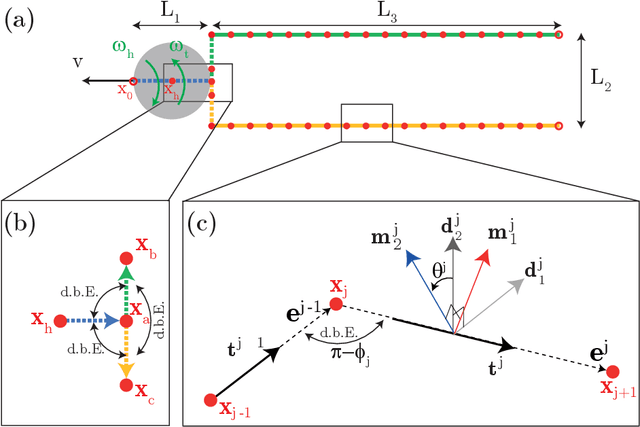
The locomotion and mechanical efficiency of micro organisms, specifically micro-swimmers, have drawn interest in the fields of biology and fluid dynamics. A challenge in designing flagellated micro- and macro-scale robots is the geometrically nonlinear deformation of slender structures (e.g. rod-like flagella) ensuing from the interplay of elasticity and hydrodynamics. Certain types of bacteria such as Escherichia coli propel themselves by rotating multiple filamentary structures in low Reynolds flow. This multi-flagellated propulsive mechanism is qualitatively different from the single-flagellated mechanism exhibited by some other types of bacteria such as Vibrio cholerae. The differences include the flagella forming a bundle to increase directional stability for cell motility, offering redundancy for a cell to move, and offering the ability of flagella to be the delivery material itself. Above all, multi-flagellated biological system can inspire novel soft robots for application in drug transportation and delivery within the human body. We present a macroscopic soft robotic hardware platform and a computational framework for a physically plausible simulation model of the multi-flagellated robot. The fluid-structure interaction simulation couples the Discrete Elastic Rods algorithm with the method of Regularized Stokeslet Segments. Contact between two flagella is handled by a penalty-based method due to Spillmann and Teschner. We present comparison between our experimental and simulation results and verify that the simulation tool can capture the essential physics of this problem. The stability and efficiency of a multi-flagellated robot are compared with the single-flagellated counterpart.
Simple Flagellated Soft Robot for Locomotion near Air-Fluid Interface
Mar 09, 2021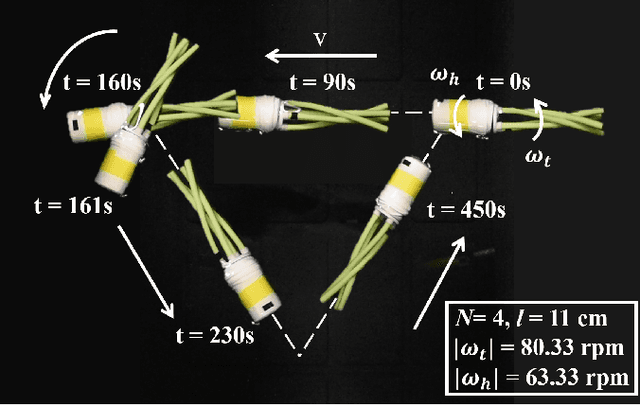

A wide range of microorganisms, e.g. bacteria, propel themselves by rotation of soft helical tails, also known as flagella. Due to the small size of these organisms, viscous forces overwhelm inertial effects and the flow is at low Reynolds number. In this fluid-structure problem, a competition between elastic forces and hydrodynamic (viscous) forces leads to a net propulsive force forward. A thorough understanding of this highly coupled fluid-structure interaction problem can not only help us better understand biological propulsion but also help us design bio-inspired functional robots with applications in oil spill cleanup, water quality monitoring, and infrastructure inspection. Here, we introduce arguably the simplest soft robot with a single binary control signal, which is capable of moving along an arbitrary 2D trajectory near air-fluid interface and at the interface between two fluids. The robot exploits the variation in viscosity to move along the prescribed trajectory. Our analysis of this newly introduced soft robot consists of three main components. First, we fabricate this simple robot and use it as an experimental testbed. Second, a discrete differential geometry-based modeling framework is used for simulation of the robot. Upon validation of the simulation tool, the third part of this study employs the simulations to develop a control scheme with a single binary input to make the robot follow any prescribed path.
Modeling the locomotion of articulated soft robots in granular medium
Mar 06, 2021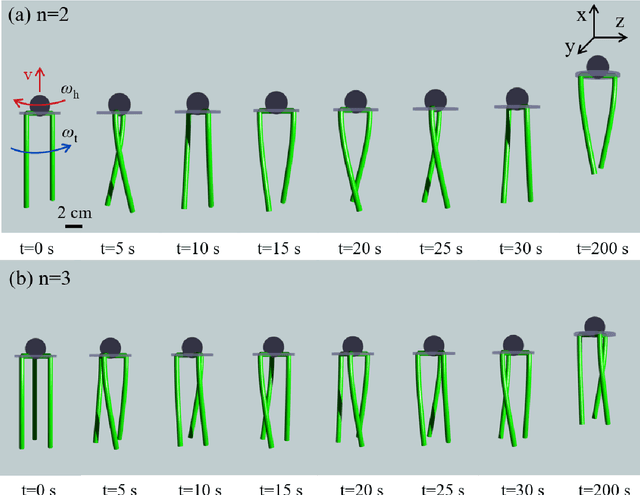
Soft robots, in contrast to their rigid counter parts, have infinite degrees of freedom that are coupled with their interaction with the environment. We consider the locomotion of an untethered robot, in the granular medium, comprised of multiple flexible flagella that rotate about an axis by a motor. Drag from the grains causes the flagella to deform and the deformed shape generates a net forward propulsion. This external drag force depends on the shape of the flagella, while the change in flagellar shape is the result of the competition between the external loading and elastic forces. We introduce a numerical tool that couples discrete differential geometry based simulation of elastic rods - our model for flagella - and a resistive force theory based model for the drag. In parallel with simulations, we conduct experiments to quantify the propulsive speed of this class of robots. We find reasonable quantitative agreement between experiments and simulations. Owing to a rod-based kinematic representation of the robot, the simulation runs faster than real-time, and, therefore, we can use it as a design tool for this class of soft robots. We find that there is an optimal rotational speed at which maximum efficiency is achieved. Moreover, both experiments and simulations show that increasing the number of flagella decreases the speed of the robot. We also gain insight into the mechanics of granular medium - while resistive force theory can successfully describe the propulsion at low number of flagella, it fails when more flagella are added to the robot.