 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMedical Image De-Identification Benchmark Challenge
Jul 31, 2025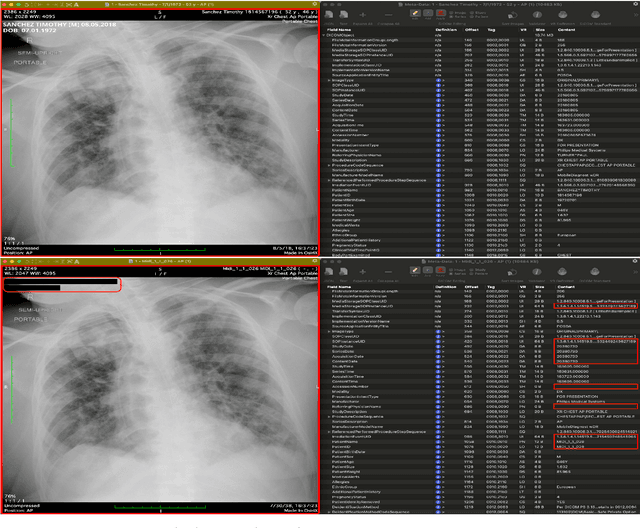
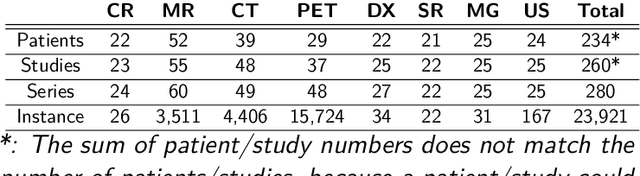
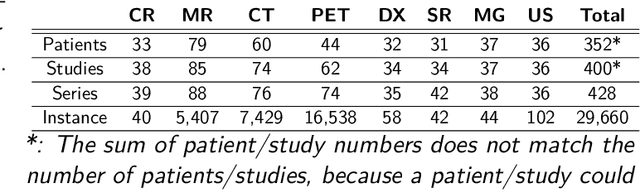
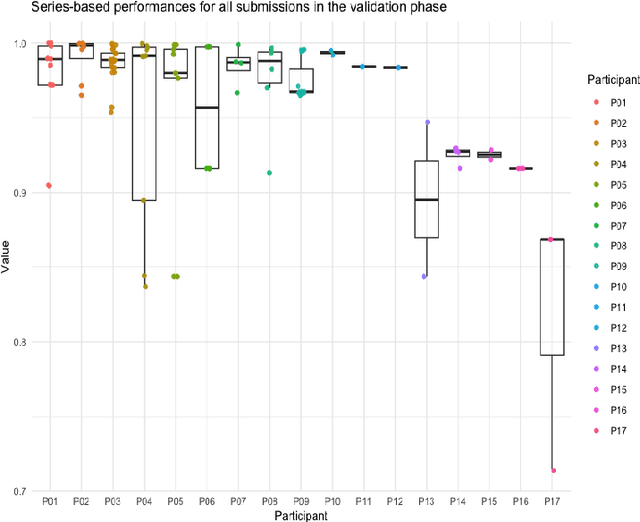
The de-identification (deID) of protected health information (PHI) and personally identifiable information (PII) is a fundamental requirement for sharing medical images, particularly through public repositories, to ensure compliance with patient privacy laws. In addition, preservation of non-PHI metadata to inform and enable downstream development of imaging artificial intelligence (AI) is an important consideration in biomedical research. The goal of MIDI-B was to provide a standardized platform for benchmarking of DICOM image deID tools based on a set of rules conformant to the HIPAA Safe Harbor regulation, the DICOM Attribute Confidentiality Profiles, and best practices in preservation of research-critical metadata, as defined by The Cancer Imaging Archive (TCIA). The challenge employed a large, diverse, multi-center, and multi-modality set of real de-identified radiology images with synthetic PHI/PII inserted. The MIDI-B Challenge consisted of three phases: training, validation, and test. Eighty individuals registered for the challenge. In the training phase, we encouraged participants to tune their algorithms using their in-house or public data. The validation and test phases utilized the DICOM images containing synthetic identifiers (of 216 and 322 subjects, respectively). Ten teams successfully completed the test phase of the challenge. To measure success of a rule-based approach to image deID, scores were computed as the percentage of correct actions from the total number of required actions. The scores ranged from 97.91% to 99.93%. Participants employed a variety of open-source and proprietary tools with customized configurations, large language models, and optical character recognition (OCR). In this paper we provide a comprehensive report on the MIDI-B Challenge's design, implementation, results, and lessons learned.
mBEST: Realtime Deformable Linear Object Detection Through Minimal Bending Energy Skeleton Pixel Traversals
Feb 18, 2023Robotic manipulation of deformable materials is a challenging task that often requires realtime visual feedback. This is especially true for deformable linear objects (DLOs) or "rods", whose slender and flexible structures make proper tracking and detection nontrivial. To address this challenge, we present mBEST, a robust algorithm for the realtime detection of DLOs that is capable of producing an ordered pixel sequence of each DLO's centerline along with segmentation masks. Our algorithm obtains a binary mask of the DLOs and then thins it to produce a skeleton pixel representation. After refining the skeleton to ensure topological correctness, the pixels are traversed to generate paths along each unique DLO. At the core of our algorithm, we postulate that intersections can be robustly handled by choosing the combination of paths that minimizes the cumulative bending energy of the DLO(s). We show that this simple and intuitive formulation outperforms the state-of-the-art methods for detecting DLOs with large numbers of sporadic crossings and curvatures with high variance. Furthermore, our method achieves a significant performance improvement of approximately 40 FPS compared to the 15 FPS of prior algorithms, which enables realtime applications.
Multicenter Assessment of Augmented Reality Registration Methods for Image-guided Interventions
Dec 03, 2020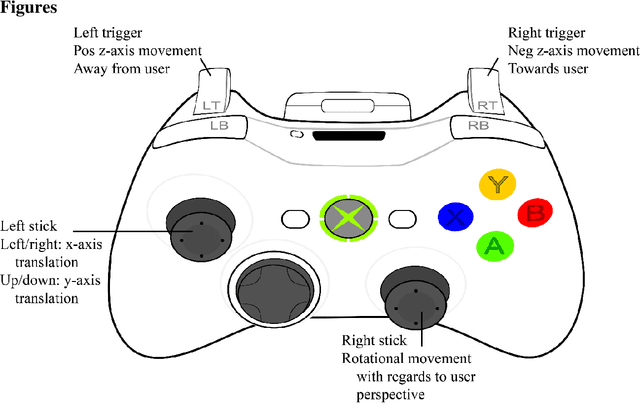
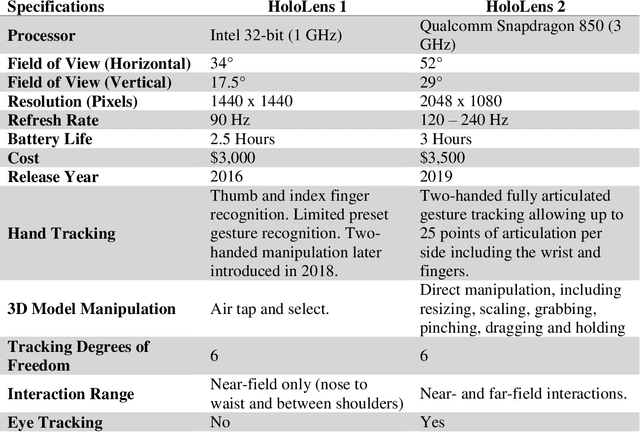
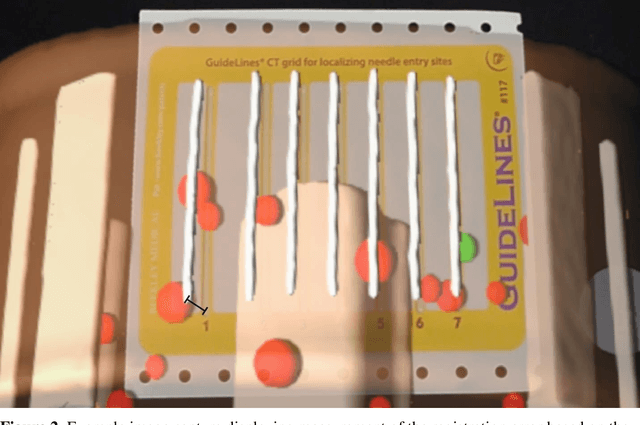
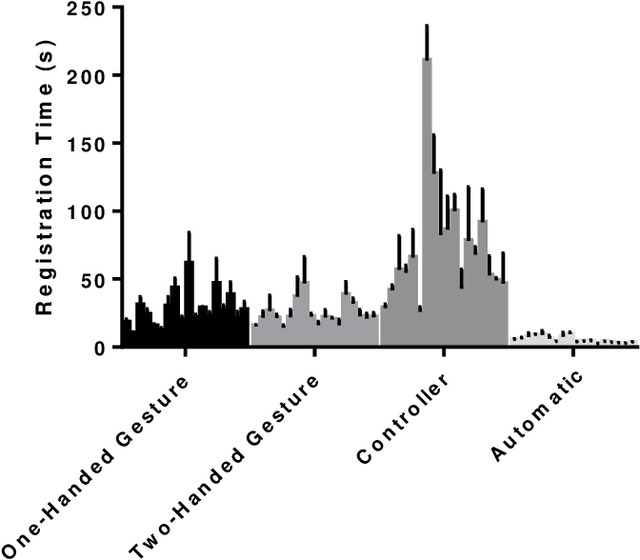
Purpose: To evaluate manual and automatic registration times as well as accuracy with augmented reality during alignment of a holographic 3-dimensional (3D) model onto the real-world environment. Method: 18 participants in various stages of clinical training across two academic centers registered a 3D CT phantom model onto a CT grid using the HoloLens 2 augmented reality headset 3 consecutive times. Registration times and accuracy were compared among different registration methods (hand gesture, Xbox controller, and automatic registration), levels of clinical experience, and consecutive attempts. Registration times were also compared with prior HoloLens 1 data. Results: Mean aggregate manual registration times were 27.7, 24.3, and 72.8 seconds for one-handed gesture, two-handed gesture, and Xbox controller, respectively; mean automatic registration time was 5.3s (ANOVA p<0.0001). No significant difference in registration times was found among attendings, residents and fellows, and medical students (p>0.05). Significant improvements in registration times were detected across consecutive attempts using hand gestures (p<0.01). Compared with previously reported HoloLens 1 experience, hand gesture registration times were 81.7% faster (p<0.05). Registration accuracies were not significantly different across manual registration methods, measuring at 5.9, 9.5, and 8.6 mm with one-handed gesture, two-handed gesture, and Xbox controller, respectively (p>0.05). Conclusions: Manual registration times decreased significantly with updated hand gesture maneuvers on HoloLens 2 versus HoloLens 1, approaching the registration times of automatic registration and outperforming Xbox controller mediated registration. These results will encourage wider clinical integration of HoloLens 2 in procedural medical care.
Image-based marker tracking and registration for intraoperative 3D image-guided interventions using augmented reality
Aug 08, 2019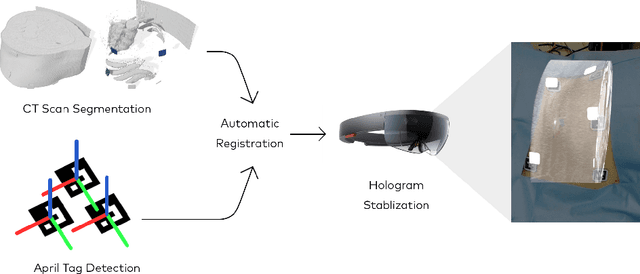
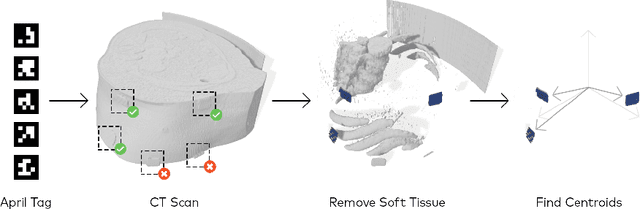
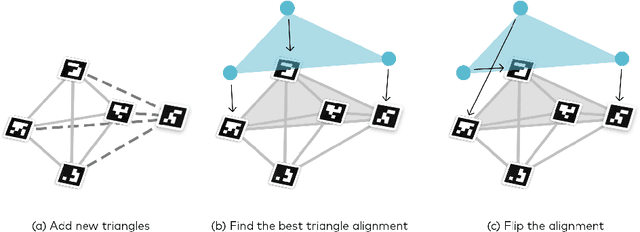
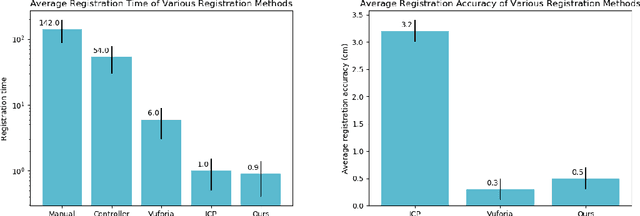
Augmented reality has the potential to improve operating room workflow by allowing physicians to "see" inside a patient through the projection of imaging directly onto the surgical field. For this to be useful the acquired imaging must be quickly and accurately registered with patient and the registration must be maintained. Here we describe a method for projecting a CT scan with Microsoft Hololens and then aligning that projection to a set of fiduciary markers. Radio-opaque stickers with unique QR-codes are placed on an object prior to acquiring a CT scan. The location of the markers in the CT scan are extracted and the CT scan is converted into a 3D surface object. The 3D object is then projected using the Hololens onto a table on which the same markers are placed. We designed an algorithm that aligns the markers on the 3D object with the markers on the table. To extract the markers and convert the CT into a 3D object took less than 5 seconds. To align three markers, it took $0.9 \pm 0.2$ seconds to achieve an accuracy of $5 \pm 2$ mm. These findings show that it is feasible to use a combined radio-opaque optical marker, placed on a patient prior to a CT scan, to subsequently align the acquired CT scan with the patient.