 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBacteria Inspired Multi-Flagella Propelled Soft Robot at Low Reynolds Number
Paper and Code
Nov 29, 2021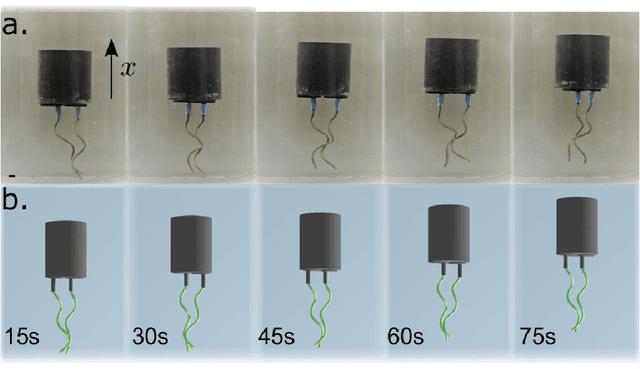

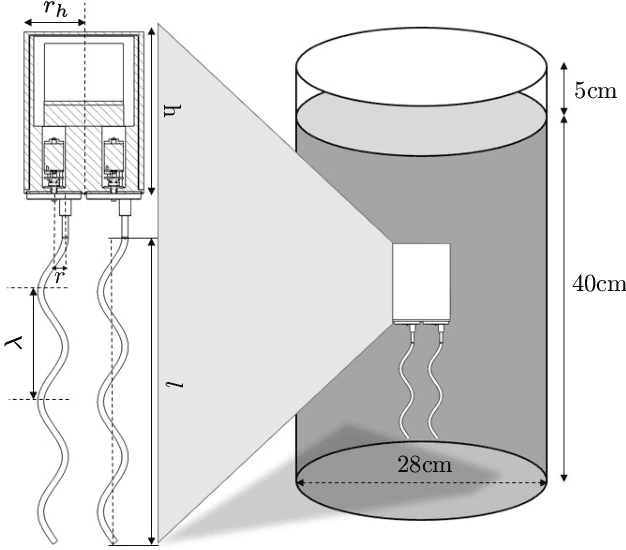
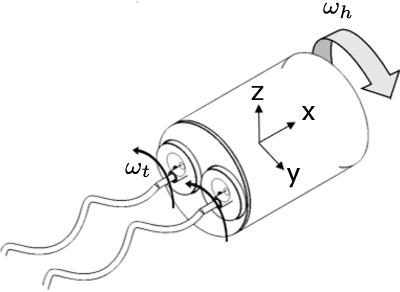
The locomotion and mechanical efficiency of micro organisms, specifically micro-swimmers, have drawn interest in the fields of biology and fluid dynamics. A challenge in designing flagellated micro- and macro-scale robots is the geometrically nonlinear deformation of slender structures (e.g. rod-like flagella) ensuing from the interplay of elasticity and hydrodynamics. Certain types of bacteria such as Escherichia coli propel themselves by rotating multiple filamentary structures in low Reynolds flow. This multi-flagellated propulsive mechanism is qualitatively different from the single-flagellated mechanism exhibited by some other types of bacteria such as Vibrio cholerae. The differences include the flagella forming a bundle to increase directional stability for cell motility, offering redundancy for a cell to move, and offering the ability of flagella to be the delivery material itself. Above all, multi-flagellated biological system can inspire novel soft robots for application in drug transportation and delivery within the human body. We present a macroscopic soft robotic hardware platform and a computational framework for a physically plausible simulation model of the multi-flagellated robot. The fluid-structure interaction simulation couples the Discrete Elastic Rods algorithm with the method of Regularized Stokeslet Segments. Contact between two flagella is handled by a penalty-based method due to Spillmann and Teschner. We present comparison between our experimental and simulation results and verify that the simulation tool can capture the essential physics of this problem. The stability and efficiency of a multi-flagellated robot are compared with the single-flagellated counterpart.