 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Low-cost Robot with Autonomous Recharge and Navigation for Weed Control in Fields with Narrow Row Spacing
Dec 03, 2021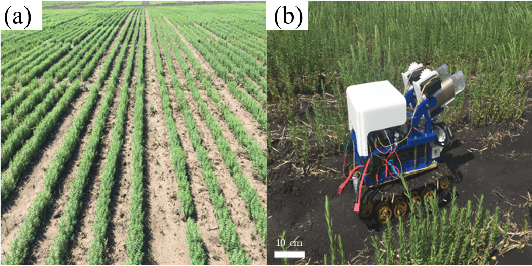
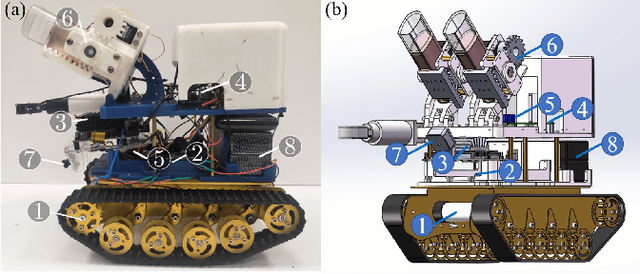
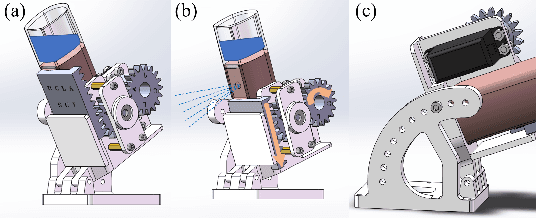
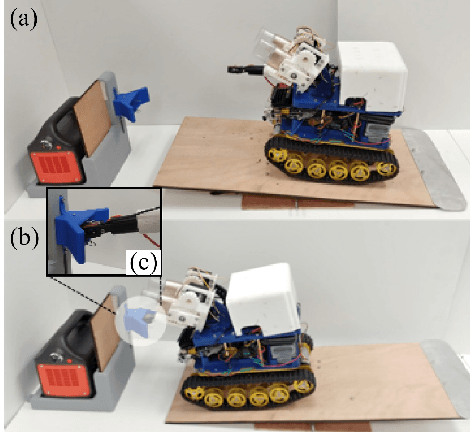
Modern herbicide application in agricultural settings typically relies on either large scale sprayers that dispense herbicide over crops and weeds alike or portable sprayers that require labor intensive manual operation. The former method results in overuse of herbicide and reduction in crop yield while the latter is often untenable in large scale operations. This paper presents the first fully autonomous robot for weed management for row crops capable of computer vision based navigation, weed detection, complete field coverage, and automatic recharge for under \$400. The target application is autonomous inter-row weed control in crop fields, e.g. flax and canola, where the spacing between croplines is as small as one foot. The proposed robot is small enough to pass between croplines at all stages of plant growth while detecting weeds and spraying herbicide. A recharging system incorporates newly designed robotic hardware, a ramp, a robotic charging arm, and a mobile charging station. An integrated vision algorithm is employed to assist with charger alignment effectively. Combined, they enable the robot to work continuously in the field without access to electricity. In addition, a color-based contour algorithm combined with preprocessing techniques is applied for robust navigation relying on the input from the onboard monocular camera. Incorporating such compact robots into farms could help automate weed control, even during late stages of growth, and reduce herbicide use by targeting weeds with precision. The robotic platform is field-tested in the flaxseed fields of North Dakota.