 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAuto-Calibrating Admittance Controller for Robust Motion of Robotic Systems
Paper and Code
Jul 06, 2022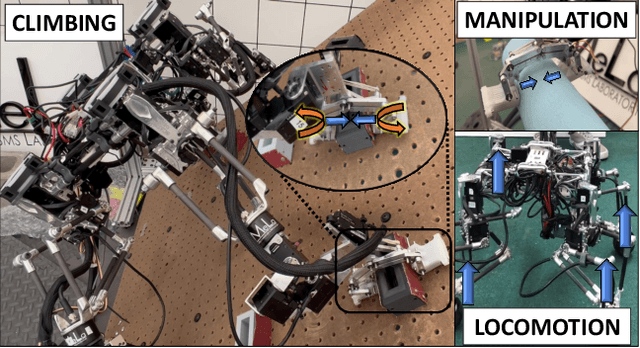
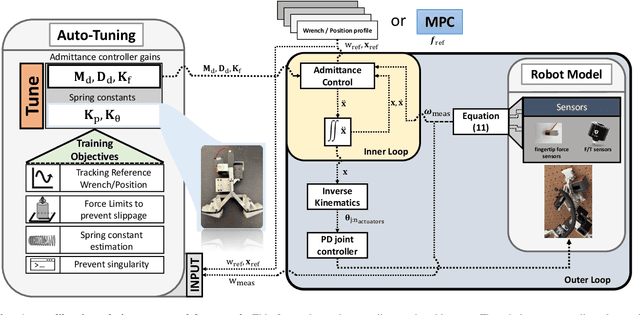
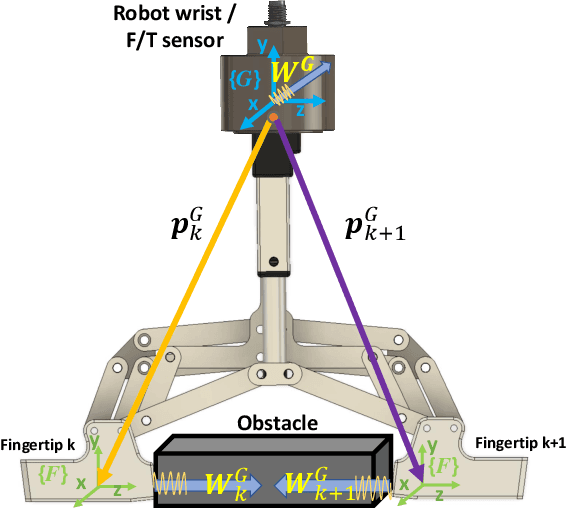
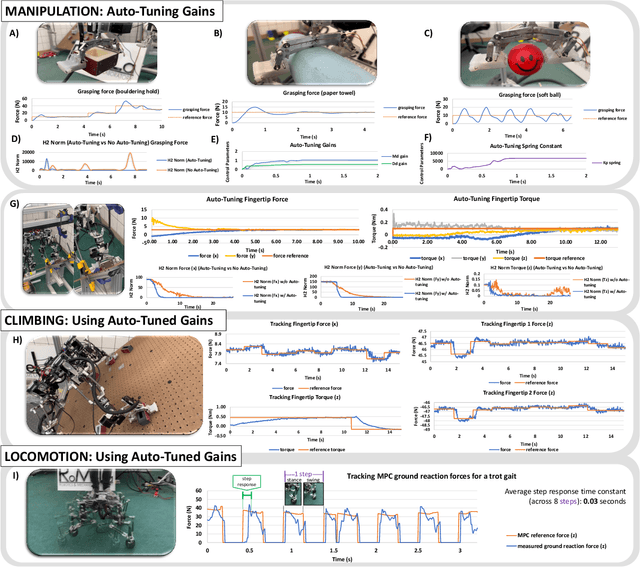
We demonstrate an admittance controller with auto-tuning that can be applied for single and multi-point contact robots (e.g., legged robots with point feet or multi-finger grippers). The controller's objective is to track wrench profiles of each contact point while considering the additional torque due to rotational friction. Our admittance controller is adaptive during online operation by using an auto-tuning method that tunes the gains of the controller while following several training objectives that facilitate controller stability, such as tracking the wrench profile as closely as possible, ensuring control outputs that are within force limits that minimize slippage, and avoids kinematic singularity. We demonstrate the robustness of our controller on hardware for both manipulation and locomotion tasks using a multi-limbed climbing robot.