 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaster Video Diffusion with Trainable Sparse Attention
May 19, 2025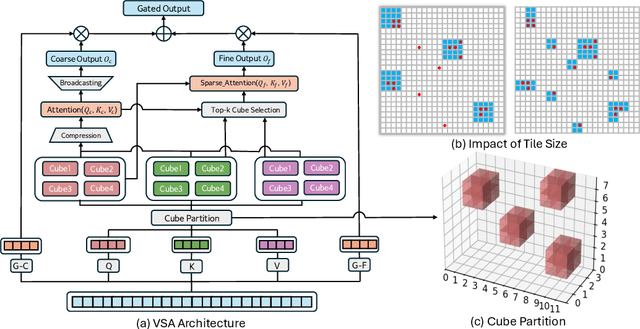
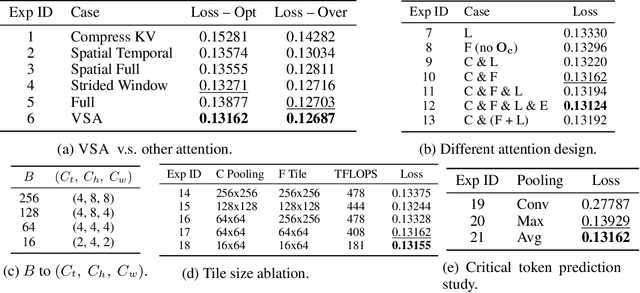
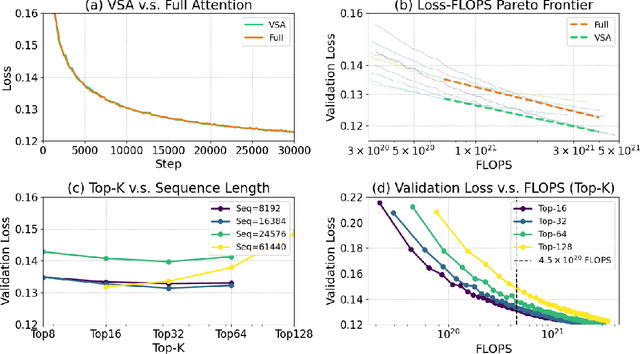
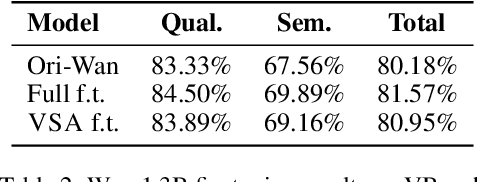
Scaling video diffusion transformers (DiTs) is limited by their quadratic 3D attention, even though most of the attention mass concentrates on a small subset of positions. We turn this observation into VSA, a trainable, hardware-efficient sparse attention that replaces full attention at \emph{both} training and inference. In VSA, a lightweight coarse stage pools tokens into tiles and identifies high-weight \emph{critical tokens}; a fine stage computes token-level attention only inside those tiles subjecting to block computing layout to ensure hard efficiency. This leads to a single differentiable kernel that trains end-to-end, requires no post-hoc profiling, and sustains 85\% of FlashAttention3 MFU. We perform a large sweep of ablation studies and scaling-law experiments by pretraining DiTs from 60M to 1.4B parameters. VSA reaches a Pareto point that cuts training FLOPS by 2.53$\times$ with no drop in diffusion loss. Retrofitting the open-source Wan-2.1 model speeds up attention time by 6$\times$ and lowers end-to-end generation time from 31s to 18s with comparable quality. These results establish trainable sparse attention as a practical alternative to full attention and a key enabler for further scaling of video diffusion models.
Fast Video Generation with Sliding Tile Attention
Feb 06, 2025


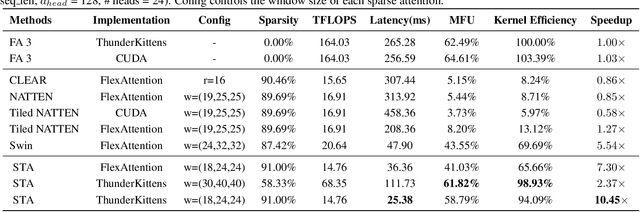
Diffusion Transformers (DiTs) with 3D full attention power state-of-the-art video generation, but suffer from prohibitive compute cost -- when generating just a 5-second 720P video, attention alone takes 800 out of 945 seconds of total inference time. This paper introduces sliding tile attention (STA) to address this challenge. STA leverages the observation that attention scores in pretrained video diffusion models predominantly concentrate within localized 3D windows. By sliding and attending over the local spatial-temporal region, STA eliminates redundancy from full attention. Unlike traditional token-wise sliding window attention (SWA), STA operates tile-by-tile with a novel hardware-aware sliding window design, preserving expressiveness while being hardware-efficient. With careful kernel-level optimizations, STA offers the first efficient 2D/3D sliding-window-like attention implementation, achieving 58.79% MFU. Precisely, STA accelerates attention by 2.8-17x over FlashAttention-2 (FA2) and 1.6-10x over FlashAttention-3 (FA3). On the leading video DiT, HunyuanVideo, STA reduces end-to-end latency from 945s (FA3) to 685s without quality degradation, requiring no training. Enabling finetuning further lowers latency to 268s with only a 0.09% drop on VBench.
Scalable Benchmarking and Robust Learning for Noise-Free Ego-Motion and 3D Reconstruction from Noisy Video
Jan 24, 2025We aim to redefine robust ego-motion estimation and photorealistic 3D reconstruction by addressing a critical limitation: the reliance on noise-free data in existing models. While such sanitized conditions simplify evaluation, they fail to capture the unpredictable, noisy complexities of real-world environments. Dynamic motion, sensor imperfections, and synchronization perturbations lead to sharp performance declines when these models are deployed in practice, revealing an urgent need for frameworks that embrace and excel under real-world noise. To bridge this gap, we tackle three core challenges: scalable data generation, comprehensive benchmarking, and model robustness enhancement. First, we introduce a scalable noisy data synthesis pipeline that generates diverse datasets simulating complex motion, sensor imperfections, and synchronization errors. Second, we leverage this pipeline to create Robust-Ego3D, a benchmark rigorously designed to expose noise-induced performance degradation, highlighting the limitations of current learning-based methods in ego-motion accuracy and 3D reconstruction quality. Third, we propose Correspondence-guided Gaussian Splatting (CorrGS), a novel test-time adaptation method that progressively refines an internal clean 3D representation by aligning noisy observations with rendered RGB-D frames from clean 3D map, enhancing geometric alignment and appearance restoration through visual correspondence. Extensive experiments on synthetic and real-world data demonstrate that CorrGS consistently outperforms prior state-of-the-art methods, particularly in scenarios involving rapid motion and dynamic illumination.
From Perfect to Noisy World Simulation: Customizable Embodied Multi-modal Perturbations for SLAM Robustness Benchmarking
Jun 24, 2024



Embodied agents require robust navigation systems to operate in unstructured environments, making the robustness of Simultaneous Localization and Mapping (SLAM) models critical to embodied agent autonomy. While real-world datasets are invaluable, simulation-based benchmarks offer a scalable approach for robustness evaluations. However, the creation of a challenging and controllable noisy world with diverse perturbations remains under-explored. To this end, we propose a novel, customizable pipeline for noisy data synthesis, aimed at assessing the resilience of multi-modal SLAM models against various perturbations. The pipeline comprises a comprehensive taxonomy of sensor and motion perturbations for embodied multi-modal (specifically RGB-D) sensing, categorized by their sources and propagation order, allowing for procedural composition. We also provide a toolbox for synthesizing these perturbations, enabling the transformation of clean environments into challenging noisy simulations. Utilizing the pipeline, we instantiate the large-scale Noisy-Replica benchmark, which includes diverse perturbation types, to evaluate the risk tolerance of existing advanced RGB-D SLAM models. Our extensive analysis uncovers the susceptibilities of both neural (NeRF and Gaussian Splatting -based) and non-neural SLAM models to disturbances, despite their demonstrated accuracy in standard benchmarks. Our code is publicly available at https://github.com/Xiaohao-Xu/SLAM-under-Perturbation.
Customizing Visual-Language Foundation Models for Multi-modal Anomaly Detection and Reasoning
Mar 17, 2024
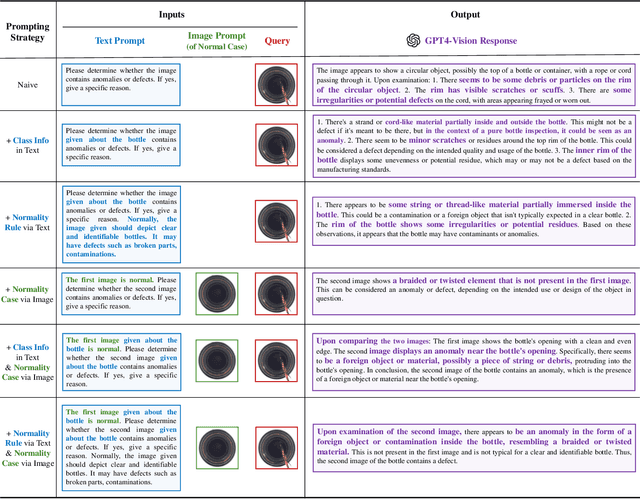

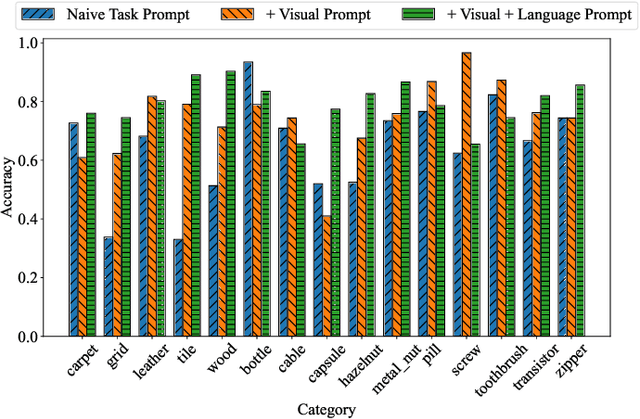
Anomaly detection is vital in various industrial scenarios, including the identification of unusual patterns in production lines and the detection of manufacturing defects for quality control. Existing techniques tend to be specialized in individual scenarios and lack generalization capacities. In this study, we aim to develop a generic anomaly detection model applicable across multiple scenarios. To achieve this, we customize generic visual-language foundation models that possess extensive knowledge and robust reasoning abilities into anomaly detectors and reasoners. Specifically, we introduce a multi-modal prompting strategy that incorporates domain knowledge from experts as conditions to guide the models. Our approach considers multi-modal prompt types, including task descriptions, class context, normality rules, and reference images. In addition, we unify the input representation of multi-modality into a 2D image format, enabling multi-modal anomaly detection and reasoning. Our preliminary studies demonstrate that combining visual and language prompts as conditions for customizing the models enhances anomaly detection performance. The customized models showcase the ability to detect anomalies across different data modalities such as images and point clouds. Qualitative case studies further highlight the anomaly detection and reasoning capabilities, particularly for multi-object scenes and temporal data. Our code is available at https://github.com/Xiaohao-Xu/Customizable-VLM.
Customizable Perturbation Synthesis for Robust SLAM Benchmarking
Feb 12, 2024Robustness is a crucial factor for the successful deployment of robots in unstructured environments, particularly in the domain of Simultaneous Localization and Mapping (SLAM). Simulation-based benchmarks have emerged as a highly scalable approach for robustness evaluation compared to real-world data collection. However, crafting a challenging and controllable noisy world with diverse perturbations remains relatively under-explored. To this end, we propose a novel, customizable pipeline for noisy data synthesis, aimed at assessing the resilience of multi-modal SLAM models against various perturbations. This pipeline incorporates customizable hardware setups, software components, and perturbed environments. In particular, we introduce comprehensive perturbation taxonomy along with a perturbation composition toolbox, allowing the transformation of clean simulations into challenging noisy environments. Utilizing the pipeline, we instantiate the Robust-SLAM benchmark, which includes diverse perturbation types, to evaluate the risk tolerance of existing advanced multi-modal SLAM models. Our extensive analysis uncovers the susceptibilities of existing SLAM models to real-world disturbance, despite their demonstrated accuracy in standard benchmarks. Our perturbation synthesis toolbox, SLAM robustness evaluation pipeline, and Robust-SLAM benchmark will be made publicly available at https://github.com/Xiaohao-Xu/SLAM-under-Perturbation/.