 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-Demand Scenario Generation for Testing Automated Driving Systems
May 20, 2025The safety and reliability of Automated Driving Systems (ADS) are paramount, necessitating rigorous testing methodologies to uncover potential failures before deployment. Traditional testing approaches often prioritize either natural scenario sampling or safety-critical scenario generation, resulting in overly simplistic or unrealistic hazardous tests. In practice, the demand for natural scenarios (e.g., when evaluating the ADS's reliability in real-world conditions), critical scenarios (e.g., when evaluating safety in critical situations), or somewhere in between (e.g., when testing the ADS in regions with less civilized drivers) varies depending on the testing objectives. To address this issue, we propose the On-demand Scenario Generation (OSG) Framework, which generates diverse scenarios with varying risk levels. Achieving the goal of OSG is challenging due to the complexity of quantifying the criticalness and naturalness stemming from intricate vehicle-environment interactions, as well as the need to maintain scenario diversity across various risk levels. OSG learns from real-world traffic datasets and employs a Risk Intensity Regulator to quantitatively control the risk level. It also leverages an improved heuristic search method to ensure scenario diversity. We evaluate OSG on the Carla simulators using various ADSs. We verify OSG's ability to generate scenarios with different risk levels and demonstrate its necessity by comparing accident types across risk levels. With the help of OSG, we are now able to systematically and objectively compare the performance of different ADSs based on different risk levels.
Adversarial Safety-Critical Scenario Generation using Naturalistic Human Driving Priors
Aug 07, 2024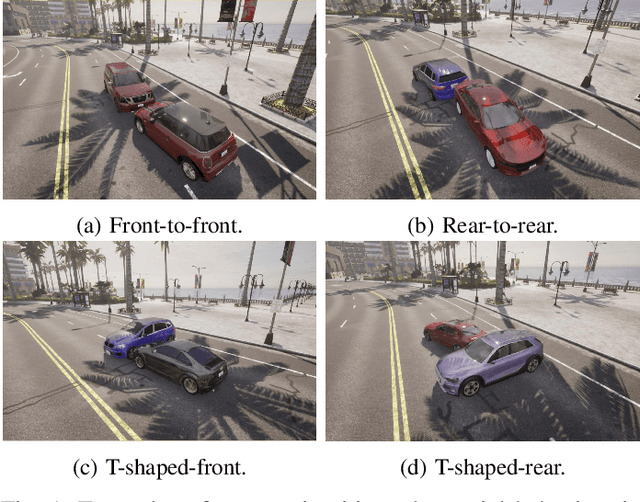
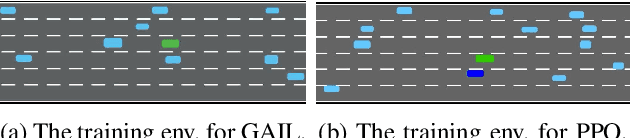
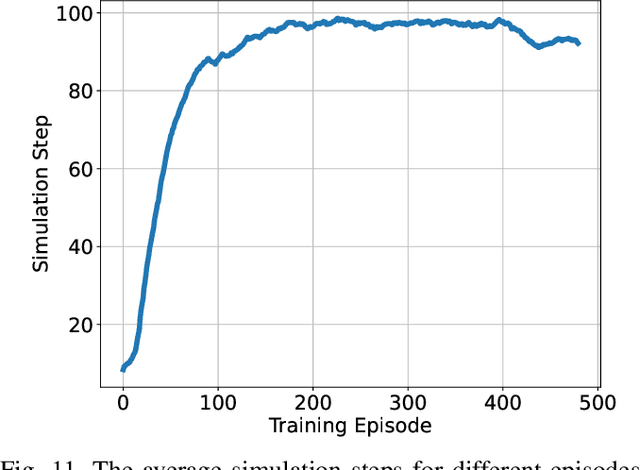
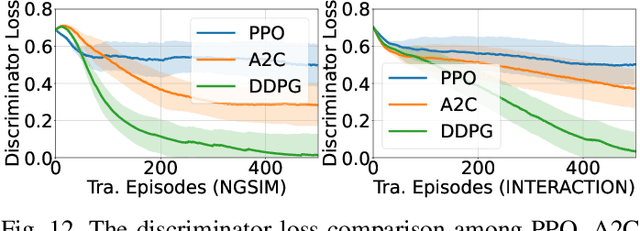
Evaluating the decision-making system is indispensable in developing autonomous vehicles, while realistic and challenging safety-critical test scenarios play a crucial role. Obtaining these scenarios is non-trivial, thanks to the long-tailed distribution, sparsity, and rarity in real-world data sets. To tackle this problem, in this paper, we introduce a natural adversarial scenario generation solution using naturalistic human driving priors and reinforcement learning techniques. By doing this, we can obtain large-scale test scenarios that are both diverse and realistic. Specifically, we build a simulation environment that mimics natural traffic interaction scenarios. Informed by this environment, we implement a two-stage procedure. The first stage incorporates conventional rule-based models, e.g., IDM~(Intelligent Driver Model) and MOBIL~(Minimizing Overall Braking Induced by Lane changes) model, to coarsely and discretely capture and calibrate key control parameters from the real-world dataset. Next, we leverage GAIL~(Generative Adversarial Imitation Learning) to represent driver behaviors continuously. The derived GAIL can be further used to design a PPO~(Proximal Policy Optimization)-based actor-critic network framework to fine-tune the reward function, and then optimizes our natural adversarial scenario generation solution. Extensive experiments have been conducted in the NGSIM dataset including the trajectory of 3,000 vehicles. Essential traffic parameters were measured in comparison with the baseline model, e.g., the collision rate, accelerations, steering, and the number of lane changes. Our findings demonstrate that the proposed model can generate realistic safety-critical test scenarios covering both naturalness and adversariality, which can be a cornerstone for the development of autonomous vehicles.
* Published in IEEE Transactions on Intelligent Vehicles, 2023
DHGS: Decoupled Hybrid Gaussian Splatting for Driving Scene
Jul 29, 2024



Existing Gaussian splatting methods often fall short in achieving satisfactory novel view synthesis in driving scenes, primarily due to the absence of crafty design and geometric constraints for the involved elements. This paper introduces a novel neural rendering method termed Decoupled Hybrid Gaussian Splatting (DHGS), targeting at promoting the rendering quality of novel view synthesis for static driving scenes. The novelty of this work lies in the decoupled and hybrid pixel-level blender for road and non-road layers, without the conventional unified differentiable rendering logic for the entire scene, while still maintaining consistent and continuous superimposition through the proposed depth-ordered hybrid rendering strategy. Additionally, an implicit road representation comprised of a Signed Distance Field (SDF) is trained to supervise the road surface with subtle geometric attributes. Accompanied by the use of auxiliary transmittance loss and consistency loss, novel images with imperceptible boundary and elevated fidelity are ultimately obtained. Substantial experiments on the Waymo dataset prove that DHGS outperforms the state-of-the-art methods. The project page where more video evidences are given is: https://ironbrotherstyle.github.io/dhgs_web.
Delving into Differentially Private Transformer
May 29, 2024



Deep learning with differential privacy (DP) has garnered significant attention over the past years, leading to the development of numerous methods aimed at enhancing model accuracy and training efficiency. This paper delves into the problem of training Transformer models with differential privacy. Our treatment is modular: the logic is to `reduce' the problem of training DP Transformer to the more basic problem of training DP vanilla neural nets. The latter is better understood and amenable to many model-agnostic methods. Such `reduction' is done by first identifying the hardness unique to DP Transformer training: the attention distraction phenomenon and a lack of compatibility with existing techniques for efficient gradient clipping. To deal with these two issues, we propose the Re-Attention Mechanism and Phantom Clipping, respectively. We believe that our work not only casts new light on training DP Transformers but also promotes a modular treatment to advance research in the field of differentially private deep learning.
Progressive Feature Fusion Network for Enhancing Image Quality Assessment
Jan 13, 2024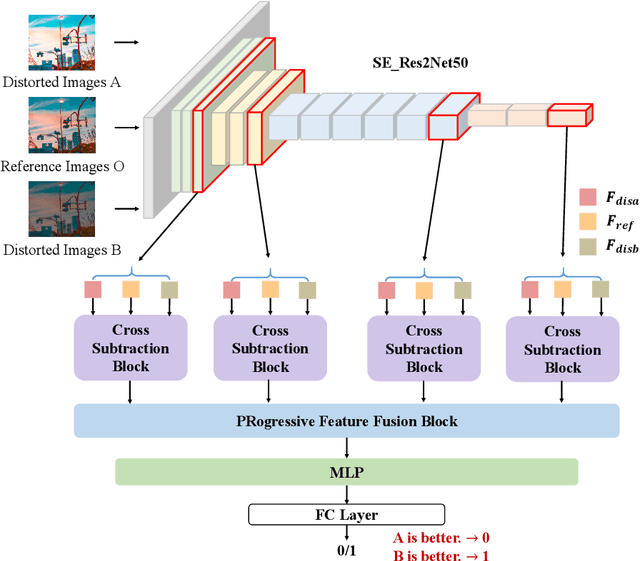
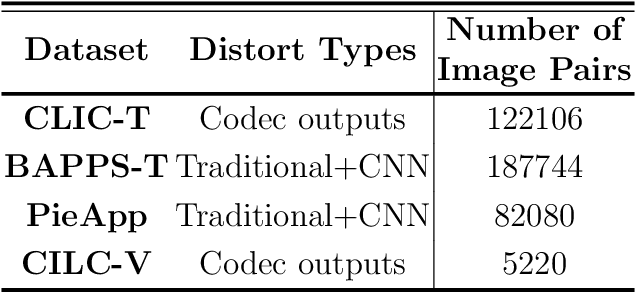
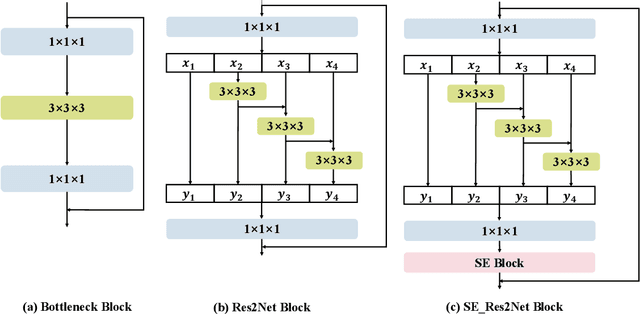
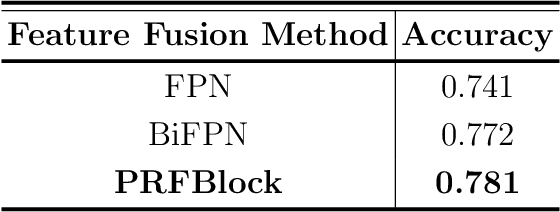
Image compression has been applied in the fields of image storage and video broadcasting. However, it's formidably tough to distinguish the subtle quality differences between those distorted images generated by different algorithms. In this paper, we propose a new image quality assessment framework to decide which image is better in an image group. To capture the subtle differences, a fine-grained network is adopted to acquire multi-scale features. Subsequently, we design a cross subtract block for separating and gathering the information within positive and negative image pairs. Enabling image comparison in feature space. After that, a progressive feature fusion block is designed, which fuses multi-scale features in a novel progressive way. Hierarchical spatial 2D features can thus be processed gradually. Experimental results show that compared with the current mainstream image quality assessment methods, the proposed network can achieve more accurate image quality assessment and ranks second in the benchmark of CLIC in the image perceptual model track.
Scalable Multi-view Clustering with Graph Filtering
May 18, 2022With the explosive growth of multi-source data, multi-view clustering has attracted great attention in recent years. Most existing multi-view methods operate in raw feature space and heavily depend on the quality of original feature representation. Moreover, they are often designed for feature data and ignore the rich topology structure information. Accordingly, in this paper, we propose a generic framework to cluster both attribute and graph data with heterogeneous features. It is capable of exploring the interplay between feature and structure. Specifically, we first adopt graph filtering technique to eliminate high-frequency noise to achieve a clustering-friendly smooth representation. To handle the scalability challenge, we develop a novel sampling strategy to improve the quality of anchors. Extensive experiments on attribute and graph benchmarks demonstrate the superiority of our approach with respect to state-of-the-art approaches.