 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn-Demand Scenario Generation for Testing Automated Driving Systems
May 20, 2025The safety and reliability of Automated Driving Systems (ADS) are paramount, necessitating rigorous testing methodologies to uncover potential failures before deployment. Traditional testing approaches often prioritize either natural scenario sampling or safety-critical scenario generation, resulting in overly simplistic or unrealistic hazardous tests. In practice, the demand for natural scenarios (e.g., when evaluating the ADS's reliability in real-world conditions), critical scenarios (e.g., when evaluating safety in critical situations), or somewhere in between (e.g., when testing the ADS in regions with less civilized drivers) varies depending on the testing objectives. To address this issue, we propose the On-demand Scenario Generation (OSG) Framework, which generates diverse scenarios with varying risk levels. Achieving the goal of OSG is challenging due to the complexity of quantifying the criticalness and naturalness stemming from intricate vehicle-environment interactions, as well as the need to maintain scenario diversity across various risk levels. OSG learns from real-world traffic datasets and employs a Risk Intensity Regulator to quantitatively control the risk level. It also leverages an improved heuristic search method to ensure scenario diversity. We evaluate OSG on the Carla simulators using various ADSs. We verify OSG's ability to generate scenarios with different risk levels and demonstrate its necessity by comparing accident types across risk levels. With the help of OSG, we are now able to systematically and objectively compare the performance of different ADSs based on different risk levels.
Generative Modeling of Adversarial Lane-Change Scenario
Mar 15, 2025



Decision-making in long-tail scenarios is crucial to autonomous driving development, with realistic and challenging simulations playing a pivotal role in testing safety-critical situations. However, the current open-source datasets do not systematically include long-tail distributed scenario data, making acquiring such scenarios a formidable task. To address this problem, a data mining framework is proposed, which performs in-depth analysis on two widely-used datasets, NGSIM and INTERACTION, to pinpoint data with hazardous behavioral traits, aiming to bridge the gap in these overlooked scenarios. The approach utilizes Generative Adversarial Imitation Learning (GAIL) based on an enhanced Proximal Policy Optimization (PPO) model, integrated with the vehicle's environmental analysis, to iteratively refine and represent the newly generated vehicle trajectory. Innovatively, the solution optimizes the generation of adversarial scenario data from the perspectives of sensitivity and reasonable adversarial. It is demonstrated through experiments that, compared to the unfiltered data and baseline models, the approach exhibits more adversarial yet natural behavior regarding collision rate, acceleration, and lane changes, thereby validating its suitability for generating scenario data and providing constructive insights for the development of future scenarios and subsequent decision training.
Adversarial Safety-Critical Scenario Generation using Naturalistic Human Driving Priors
Aug 07, 2024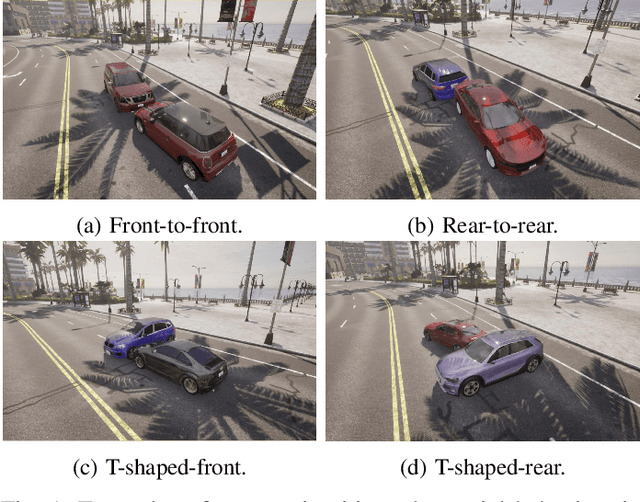
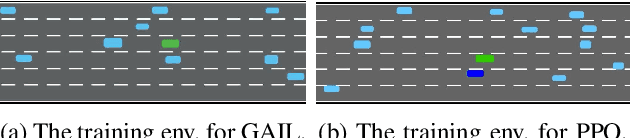
Evaluating the decision-making system is indispensable in developing autonomous vehicles, while realistic and challenging safety-critical test scenarios play a crucial role. Obtaining these scenarios is non-trivial, thanks to the long-tailed distribution, sparsity, and rarity in real-world data sets. To tackle this problem, in this paper, we introduce a natural adversarial scenario generation solution using naturalistic human driving priors and reinforcement learning techniques. By doing this, we can obtain large-scale test scenarios that are both diverse and realistic. Specifically, we build a simulation environment that mimics natural traffic interaction scenarios. Informed by this environment, we implement a two-stage procedure. The first stage incorporates conventional rule-based models, e.g., IDM~(Intelligent Driver Model) and MOBIL~(Minimizing Overall Braking Induced by Lane changes) model, to coarsely and discretely capture and calibrate key control parameters from the real-world dataset. Next, we leverage GAIL~(Generative Adversarial Imitation Learning) to represent driver behaviors continuously. The derived GAIL can be further used to design a PPO~(Proximal Policy Optimization)-based actor-critic network framework to fine-tune the reward function, and then optimizes our natural adversarial scenario generation solution. Extensive experiments have been conducted in the NGSIM dataset including the trajectory of 3,000 vehicles. Essential traffic parameters were measured in comparison with the baseline model, e.g., the collision rate, accelerations, steering, and the number of lane changes. Our findings demonstrate that the proposed model can generate realistic safety-critical test scenarios covering both naturalness and adversariality, which can be a cornerstone for the development of autonomous vehicles.
* Published in IEEE Transactions on Intelligent Vehicles, 2023
Bridging Data-Driven and Knowledge-Driven Approaches for Safety-Critical Scenario Generation in Automated Vehicle Validation
Nov 18, 2023



Automated driving vehicles~(ADV) promise to enhance driving efficiency and safety, yet they face intricate challenges in safety-critical scenarios. As a result, validating ADV within generated safety-critical scenarios is essential for both development and performance evaluations. This paper investigates the complexities of employing two major scenario-generation solutions: data-driven and knowledge-driven methods. Data-driven methods derive scenarios from recorded datasets, efficiently generating scenarios by altering the existing behavior or trajectories of traffic participants but often falling short in considering ADV perception; knowledge-driven methods provide effective coverage through expert-designed rules, but they may lead to inefficiency in generating safety-critical scenarios within that coverage. To overcome these challenges, we introduce BridgeGen, a safety-critical scenario generation framework, designed to bridge the benefits of both methodologies. Specifically, by utilizing ontology-based techniques, BridgeGen models the five scenario layers in the operational design domain (ODD) from knowledge-driven methods, ensuring broad coverage, and incorporating data-driven strategies to efficiently generate safety-critical scenarios. An optimized scenario generation toolkit is developed within BridgeGen. This expedites the crafting of safety-critical scenarios through a combination of traditional optimization and reinforcement learning schemes. Extensive experiments conducted using Carla simulator demonstrate the effectiveness of BridgeGen in generating diverse safety-critical scenarios.