 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMultimodal Classification Network Guided Trajectory Planning for Four-Wheel Independent Steering Autonomous Parking Considering Obstacle Attributes
Dec 21, 2025Four-wheel Independent Steering (4WIS) vehicles have attracted increasing attention for their superior maneuverability. Human drivers typically choose to cross or drive over the low-profile obstacles (e.g., plastic bags) to efficiently navigate through narrow spaces, while existing planners neglect obstacle attributes, causing inefficiency or path-finding failures. To address this, we propose a trajectory planning framework integrating the 4WIS hybrid A* and Optimal Control Problem (OCP), in which the hybrid A* provides an initial path to enhance the OCP solution. Specifically, a multimodal classification network is introduced to assess scene complexity (hard/easy task) by fusing image and vehicle state data. For hard tasks, guided points are set to decompose complex tasks into local subtasks, improving the search efficiency of 4WIS hybrid A*. The multiple steering modes of 4WIS vehicles (Ackermann, diagonal, and zero-turn) are also incorporated into node expansion and heuristic designs. Moreover, a hierarchical obstacle handling strategy is designed to guide the node expansion considering obstacle attributes, i.e., 'non-traversable', 'crossable', and 'drive-over' obstacles. It allows crossing or driving over obstacles instead of the 'avoid-only' strategy, greatly enhancing success rates of pathfinding. We also design a logical constraint for the 'drive-over' obstacle by limiting its velocity to ensure safety. Furthermore, to address dynamic obstacles with motion uncertainty, we introduce a probabilistic risk field model, constructing risk-aware driving corridors that serve as linear collision constraints in OCP. Experimental results demonstrate the proposed framework's effectiveness in generating safe, efficient, and smooth trajectories for 4WIS vehicles, especially in constrained environments.
Graph-Fused Vision-Language-Action for Policy Reasoning in Multi-Arm Robotic Manipulation
Sep 09, 2025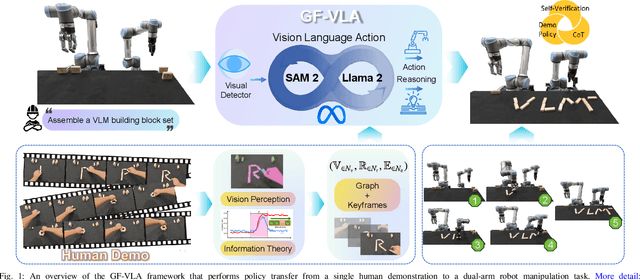
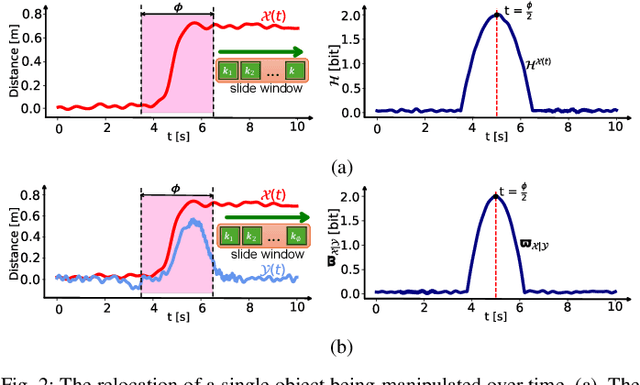
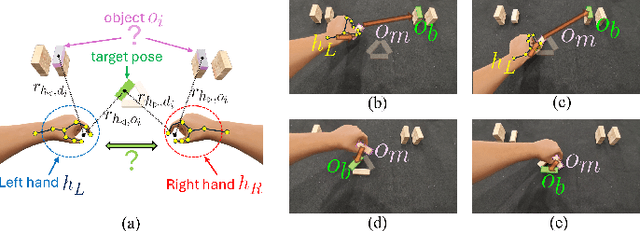
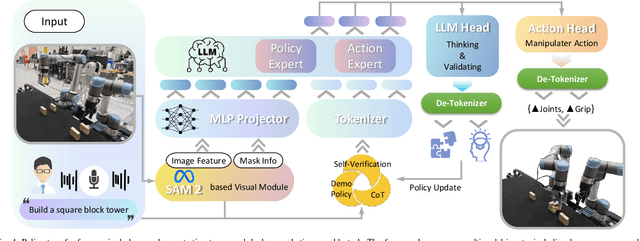
Acquiring dexterous robotic skills from human video demonstrations remains a significant challenge, largely due to conventional reliance on low-level trajectory replication, which often fails to generalize across varying objects, spatial layouts, and manipulator configurations. To address this limitation, we introduce Graph-Fused Vision-Language-Action (GF-VLA), a unified framework that enables dual-arm robotic systems to perform task-level reasoning and execution directly from RGB-D human demonstrations. GF-VLA employs an information-theoretic approach to extract task-relevant cues, selectively highlighting critical hand-object and object-object interactions. These cues are structured into temporally ordered scene graphs, which are subsequently integrated with a language-conditioned transformer to produce hierarchical behavior trees and interpretable Cartesian motion primitives. To enhance efficiency in bimanual execution, we propose a cross-arm allocation strategy that autonomously determines gripper assignment without requiring explicit geometric modeling. We validate GF-VLA on four dual-arm block assembly benchmarks involving symbolic structure construction and spatial generalization. Empirical results demonstrate that the proposed representation achieves over 95% graph accuracy and 93% subtask segmentation, enabling the language-action planner to generate robust, interpretable task policies. When deployed on a dual-arm robot, these policies attain 94% grasp reliability, 89% placement accuracy, and 90% overall task success across stacking, letter-formation, and geometric reconfiguration tasks, evidencing strong generalization and robustness under diverse spatial and semantic variations.
Information-Theoretic Graph Fusion with Vision-Language-Action Model for Policy Reasoning and Dual Robotic Control
Aug 07, 2025Teaching robots dexterous skills from human videos remains challenging due to the reliance on low-level trajectory imitation, which fails to generalize across object types, spatial layouts, and manipulator configurations. We propose Graph-Fused Vision-Language-Action (GF-VLA), a framework that enables dual-arm robotic systems to perform task-level reasoning and execution directly from RGB and Depth human demonstrations. GF-VLA first extracts Shannon-information-based cues to identify hands and objects with the highest task relevance, then encodes these cues into temporally ordered scene graphs that capture both hand-object and object-object interactions. These graphs are fused with a language-conditioned transformer that generates hierarchical behavior trees and interpretable Cartesian motion commands. To improve execution efficiency in bimanual settings, we further introduce a cross-hand selection policy that infers optimal gripper assignment without explicit geometric reasoning. We evaluate GF-VLA on four structured dual-arm block assembly tasks involving symbolic shape construction and spatial generalization. Experimental results show that the information-theoretic scene representation achieves over 95 percent graph accuracy and 93 percent subtask segmentation, supporting the LLM planner in generating reliable and human-readable task policies. When executed by the dual-arm robot, these policies yield 94 percent grasp success, 89 percent placement accuracy, and 90 percent overall task success across stacking, letter-building, and geometric reconfiguration scenarios, demonstrating strong generalization and robustness across diverse spatial and semantic variations.
RoboNurse-VLA: Robotic Scrub Nurse System based on Vision-Language-Action Model
Sep 29, 2024



In modern healthcare, the demand for autonomous robotic assistants has grown significantly, particularly in the operating room, where surgical tasks require precision and reliability. Robotic scrub nurses have emerged as a promising solution to improve efficiency and reduce human error during surgery. However, challenges remain in terms of accurately grasping and handing over surgical instruments, especially when dealing with complex or difficult objects in dynamic environments. In this work, we introduce a novel robotic scrub nurse system, RoboNurse-VLA, built on a Vision-Language-Action (VLA) model by integrating the Segment Anything Model 2 (SAM 2) and the Llama 2 language model. The proposed RoboNurse-VLA system enables highly precise grasping and handover of surgical instruments in real-time based on voice commands from the surgeon. Leveraging state-of-the-art vision and language models, the system can address key challenges for object detection, pose optimization, and the handling of complex and difficult-to-grasp instruments. Through extensive evaluations, RoboNurse-VLA demonstrates superior performance compared to existing models, achieving high success rates in surgical instrument handovers, even with unseen tools and challenging items. This work presents a significant step forward in autonomous surgical assistance, showcasing the potential of integrating VLA models for real-world medical applications. More details can be found at https://robonurse-vla.github.io.
Fusion Dynamical Systems with Machine Learning in Imitation Learning: A Comprehensive Overview
Mar 29, 2024Imitation Learning (IL), also referred to as Learning from Demonstration (LfD), holds significant promise for capturing expert motor skills through efficient imitation, facilitating adept navigation of complex scenarios. A persistent challenge in IL lies in extending generalization from historical demonstrations, enabling the acquisition of new skills without re-teaching. Dynamical system-based IL (DSIL) emerges as a significant subset of IL methodologies, offering the ability to learn trajectories via movement primitives and policy learning based on experiential abstraction. This paper emphasizes the fusion of theoretical paradigms, integrating control theory principles inherent in dynamical systems into IL. This integration notably enhances robustness, adaptability, and convergence in the face of novel scenarios. This survey aims to present a comprehensive overview of DSIL methods, spanning from classical approaches to recent advanced approaches. We categorize DSIL into autonomous dynamical systems and non-autonomous dynamical systems, surveying traditional IL methods with low-dimensional input and advanced deep IL methods with high-dimensional input. Additionally, we present and analyze three main stability methods for IL: Lyapunov stability, contraction theory, and diffeomorphism mapping. Our exploration also extends to popular policy improvement methods for DSIL, encompassing reinforcement learning, deep reinforcement learning, and evolutionary strategies.
Design and Control of a Highly Redundant Rigid-Flexible Coupling Robot to Assist the COVID-19 Oropharyngeal-Swab Sampling
Feb 25, 2021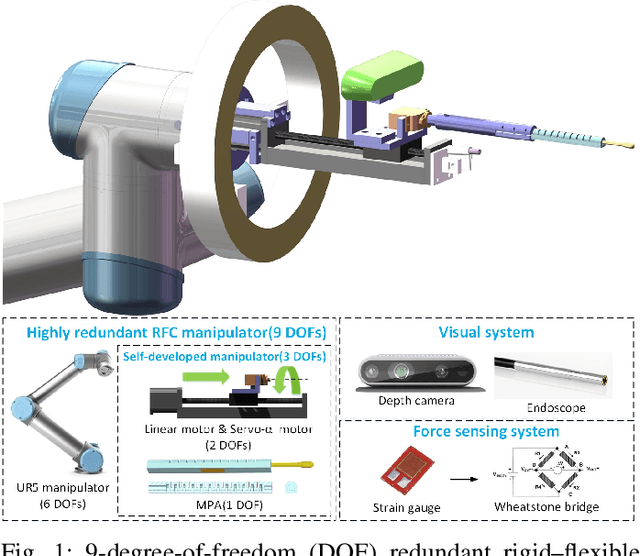
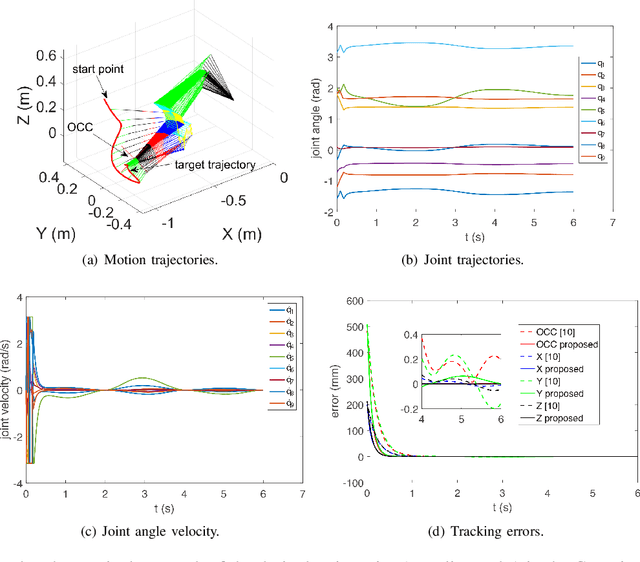
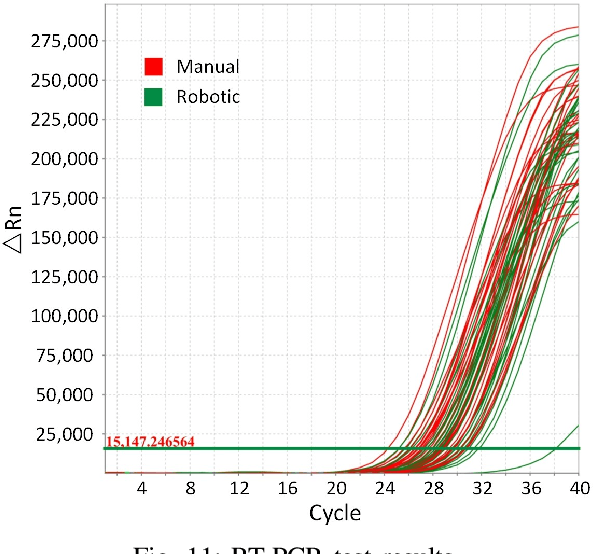
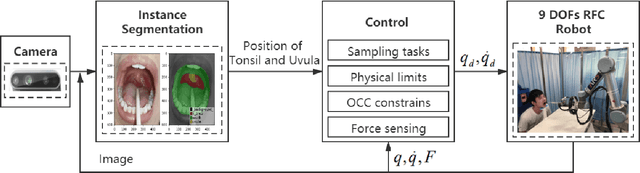
The outbreak of novel coronavirus pneumonia (COVID-19) has caused mortality and morbidity worldwide. Oropharyngeal-swab (OP-swab) sampling is widely used for the diagnosis of COVID-19 in the world. To avoid the clinical staff from being affected by the virus, we developed a 9-degree-of-freedom (DOF) rigid-flexible coupling (RFC) robot to assist the COVID-19 OP-swab sampling. This robot is composed of a visual system, UR5 robot arm, micro-pneumatic actuator and force-sensing system. The robot is expected to reduce risk and free up the clinical staff from the long-term repetitive sampling work. Compared with a rigid sampling robot, the developed force-sensing RFC robot can facilitate OP-swab sampling procedures in a safer and softer way. In addition, a varying-parameter zeroing neural network-based optimization method is also proposed for motion planning of the 9-DOF redundant manipulator. The developed robot system is validated by OP-swab sampling on both oral cavity phantoms and volunteers.
Event-based Robotic Grasping Detection with Neuromorphic Vision Sensor and Event-Stream Dataset
May 01, 2020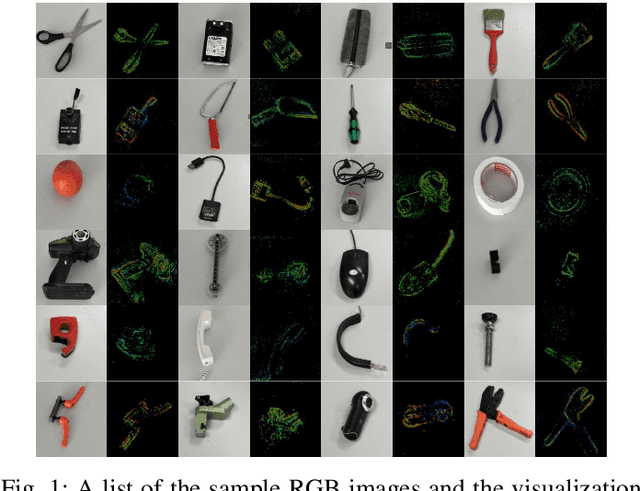
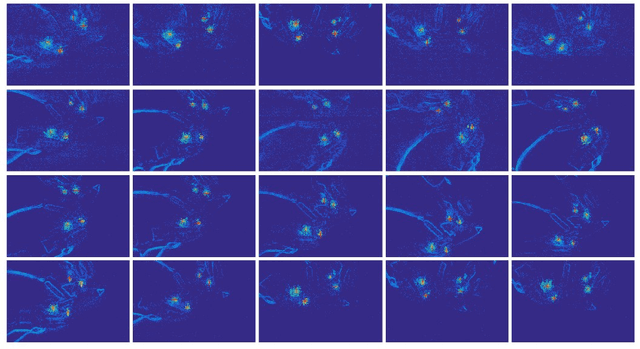

Robotic grasping plays an important role in the field of robotics. The current state-of-the-art robotic grasping detection systems are usually built on the conventional vision, such as RGB-D camera. Compared to traditional frame-based computer vision, neuromorphic vision is a small and young community of research. Currently, there are limited event-based datasets due to the troublesome annotation of the asynchronous event stream. Annotating large scale vision dataset often takes lots of computation resources, especially the troublesome data for video-level annotation. In this work, we consider the problem of detecting robotic grasps in a moving camera view of a scene containing objects. To obtain more agile robotic perception, a neuromorphic vision sensor (DAVIS) attaching to the robot gripper is introduced to explore the potential usage in grasping detection. We construct a robotic grasping dataset named Event-Stream Dataset with 91 objects. A spatio-temporal mixed particle filter (SMP Filter) is proposed to track the led-based grasp rectangles which enables video-level annotation of a single grasp rectangle per object. As leds blink at high frequency, the Event-Stream dataset is annotated in a high frequency of 1 kHz. Based on the Event-Stream dataset, we develop a deep neural network for grasping detection which consider the angle learning problem as classification instead of regression. The method performs high detection accuracy on our Event-Stream dataset with 93% precision at object-wise level. This work provides a large-scale and well-annotated dataset, and promotes the neuromorphic vision applications in agile robot.