 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
Pedestrian Crossing Action Recognition and Trajectory Prediction with 3D Human Keypoints
Jun 01, 2023



Accurate understanding and prediction of human behaviors are critical prerequisites for autonomous vehicles, especially in highly dynamic and interactive scenarios such as intersections in dense urban areas. In this work, we aim at identifying crossing pedestrians and predicting their future trajectories. To achieve these goals, we not only need the context information of road geometry and other traffic participants but also need fine-grained information of the human pose, motion and activity, which can be inferred from human keypoints. In this paper, we propose a novel multi-task learning framework for pedestrian crossing action recognition and trajectory prediction, which utilizes 3D human keypoints extracted from raw sensor data to capture rich information on human pose and activity. Moreover, we propose to apply two auxiliary tasks and contrastive learning to enable auxiliary supervisions to improve the learned keypoints representation, which further enhances the performance of major tasks. We validate our approach on a large-scale in-house dataset, as well as a public benchmark dataset, and show that our approach achieves state-of-the-art performance on a wide range of evaluation metrics. The effectiveness of each model component is validated in a detailed ablation study.
Multi-modal 3D Human Pose Estimation with 2D Weak Supervision in Autonomous Driving
Dec 22, 2021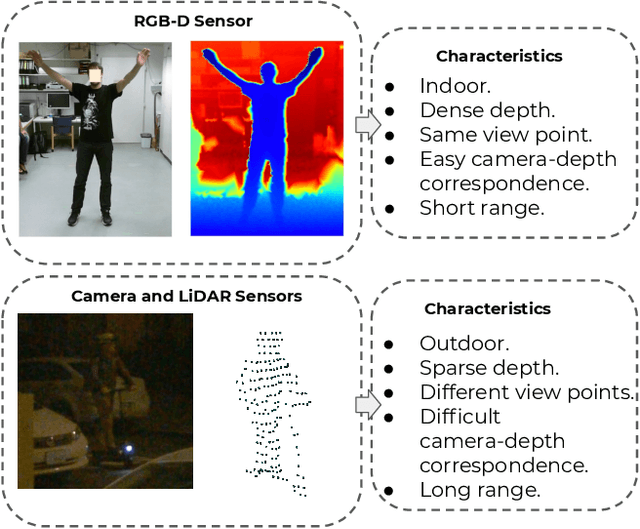
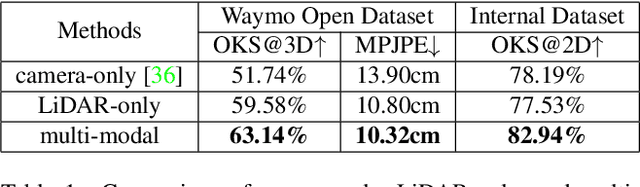
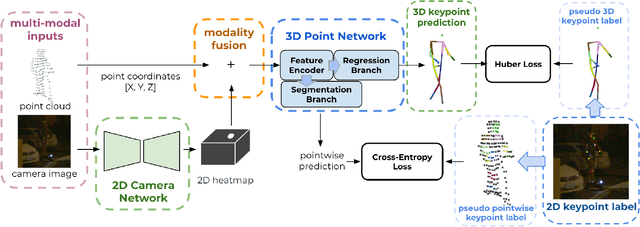
3D human pose estimation (HPE) in autonomous vehicles (AV) differs from other use cases in many factors, including the 3D resolution and range of data, absence of dense depth maps, failure modes for LiDAR, relative location between the camera and LiDAR, and a high bar for estimation accuracy. Data collected for other use cases (such as virtual reality, gaming, and animation) may therefore not be usable for AV applications. This necessitates the collection and annotation of a large amount of 3D data for HPE in AV, which is time-consuming and expensive. In this paper, we propose one of the first approaches to alleviate this problem in the AV setting. Specifically, we propose a multi-modal approach which uses 2D labels on RGB images as weak supervision to perform 3D HPE. The proposed multi-modal architecture incorporates LiDAR and camera inputs with an auxiliary segmentation branch. On the Waymo Open Dataset, our approach achieves a 22% relative improvement over camera-only 2D HPE baseline, and 6% improvement over LiDAR-only model. Finally, careful ablation studies and parts based analysis illustrate the advantages of each of our contributions.
Super-Resolving Commercial Satellite Imagery Using Realistic Training Data
Feb 26, 2020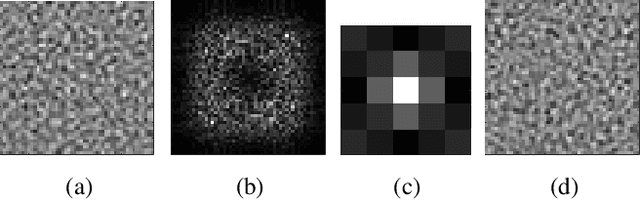
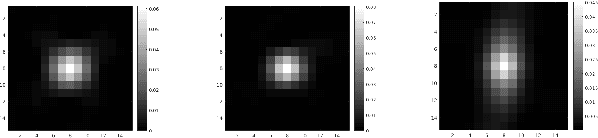
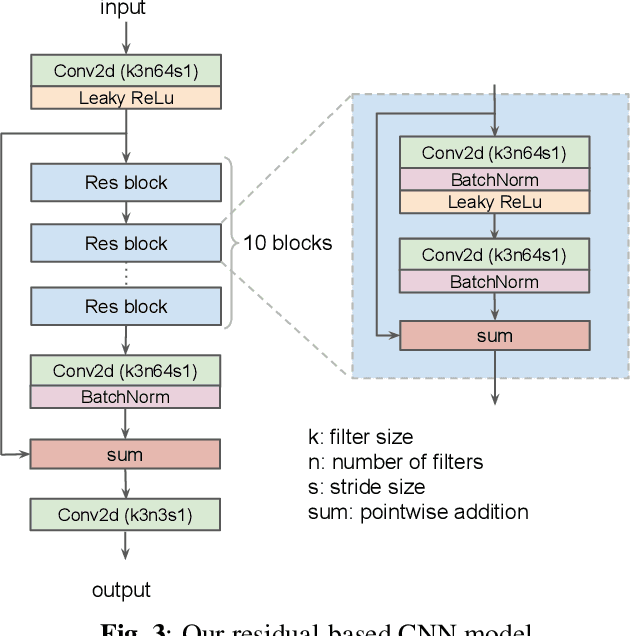
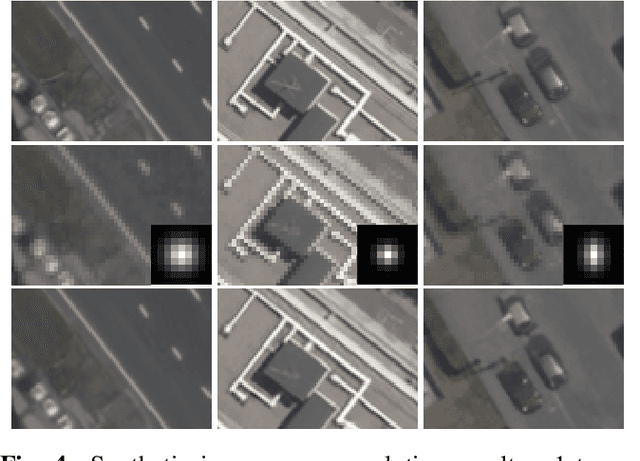
In machine learning based single image super-resolution, the degradation model is embedded in training data generation. However, most existing satellite image super-resolution methods use a simple down-sampling model with a fixed kernel to create training images. These methods work fine on synthetic data, but do not perform well on real satellite images. We propose a realistic training data generation model for commercial satellite imagery products, which includes not only the imaging process on satellites but also the post-process on the ground. We also propose a convolutional neural network optimized for satellite images. Experiments show that the proposed training data generation model is able to improve super-resolution performance on real satellite images.