 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMegaScale-Infer: Serving Mixture-of-Experts at Scale with Disaggregated Expert Parallelism
Apr 03, 2025



Mixture-of-Experts (MoE) showcases tremendous potential to scale large language models (LLMs) with enhanced performance and reduced computational complexity. However, its sparsely activated architecture shifts feed-forward networks (FFNs) from being compute-intensive to memory-intensive during inference, leading to substantially lower GPU utilization and increased operational costs. We present MegaScale-Infer, an efficient and cost-effective system for serving large-scale MoE models. MegaScale-Infer disaggregates attention and FFN modules within each model layer, enabling independent scaling, tailored parallelism strategies, and heterogeneous deployment for both modules. To fully exploit disaggregation in the presence of MoE's sparsity, MegaScale-Infer introduces ping-pong pipeline parallelism, which partitions a request batch into micro-batches and shuttles them between attention and FFNs for inference. Combined with distinct model parallelism for each module, MegaScale-Infer effectively hides communication overhead and maximizes GPU utilization. To adapt to disaggregated attention and FFN modules and minimize data transmission overhead (e.g., token dispatch), MegaScale-Infer provides a high-performance M2N communication library that eliminates unnecessary GPU-to-CPU data copies, group initialization overhead, and GPU synchronization. Experimental results indicate that MegaScale-Infer achieves up to 1.90x higher per-GPU throughput than state-of-the-art solutions.
Performance Evaluation of Large Language Models in Statistical Programming
Feb 18, 2025The programming capabilities of large language models (LLMs) have revolutionized automatic code generation and opened new avenues for automatic statistical analysis. However, the validity and quality of these generated codes need to be systematically evaluated before they can be widely adopted. Despite their growing prominence, a comprehensive evaluation of statistical code generated by LLMs remains scarce in the literature. In this paper, we assess the performance of LLMs, including two versions of ChatGPT and one version of Llama, in the domain of SAS programming for statistical analysis. Our study utilizes a set of statistical analysis tasks encompassing diverse statistical topics and datasets. Each task includes a problem description, dataset information, and human-verified SAS code. We conduct a comprehensive assessment of the quality of SAS code generated by LLMs through human expert evaluation based on correctness, effectiveness, readability, executability, and the accuracy of output results. The analysis of rating scores reveals that while LLMs demonstrate usefulness in generating syntactically correct code, they struggle with tasks requiring deep domain understanding and may produce redundant or incorrect results. This study offers valuable insights into the capabilities and limitations of LLMs in statistical programming, providing guidance for future advancements in AI-assisted coding systems for statistical analysis.
RadioLLM: Introducing Large Language Model into Cognitive Radio via Hybrid Prompt and Token Reprogrammings
Jan 28, 2025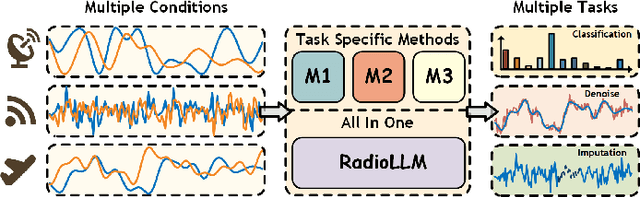



The increasing scarcity of spectrum resources and the rapid growth of wireless device have made efficient management of radio networks a critical challenge. Cognitive Radio Technology (CRT), when integrated with deep learning (DL), offers promising solutions for tasks such as radio signal classification (RSC), signal denoising, and spectrum allocation. However, existing DL-based CRT frameworks are often task-specific and lack scalability to diverse real-world scenarios. Meanwhile, Large Language Models (LLMs) have demonstrated exceptional generalization capabilities across multiple domains, making them a potential candidate for advancing CRT technologies. In this paper, we introduce RadioLLM, a novel framework that incorporates Hybrid Prompt and Token Reprogramming (HPTR) and a Frequency Attuned Fusion (FAF) module to enhance LLMs for CRT tasks. HPTR enables the integration of radio signal features with expert knowledge, while FAF improves the modeling of high-frequency features critical for precise signal processing. These innovations allow RadioLLM to handle diverse CRT tasks, bridging the gap between LLMs and traditional signal processing methods. Extensive empirical studies on multiple benchmark datasets demonstrate that the proposed RadioLLM achieves superior performance over current baselines.
UEMM-Air: A Synthetic Multi-modal Dataset for Unmanned Aerial Vehicle Object Detection
Jun 10, 2024



The development of multi-modal object detection for Unmanned Aerial Vehicles (UAVs) typically relies on a large amount of pixel-aligned multi-modal image data. However, existing datasets face challenges such as limited modalities, high construction costs, and imprecise annotations. To this end, we propose a synthetic multi-modal UAV-based object detection dataset, UEMM-Air. Specially, we simulate various UAV flight scenarios and object types using the Unreal Engine (UE). Then we design the UAV's flight logic to automatically collect data from different scenarios, perspectives, and altitudes. Finally, we propose a novel heuristic automatic annotation algorithm to generate accurate object detection labels. In total, our UEMM-Air consists of 20k pairs of images with 5 modalities and precise annotations. Moreover, we conduct numerous experiments and establish new benchmark results on our dataset. We found that models pre-trained on UEMM-Air exhibit better performance on downstream tasks compared to other similar datasets. The dataset is publicly available (https://github.com/1e12Leon/UEMM-Air) to support the research of multi-modal UAV object detection models.
Scale-Invariant Feature Disentanglement via Adversarial Learning for UAV-based Object Detection
May 24, 2024
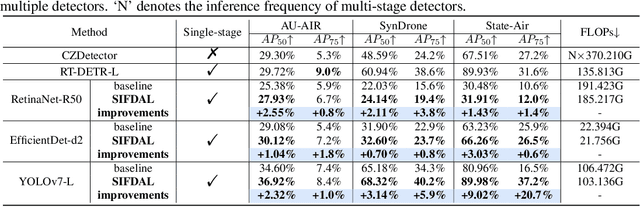
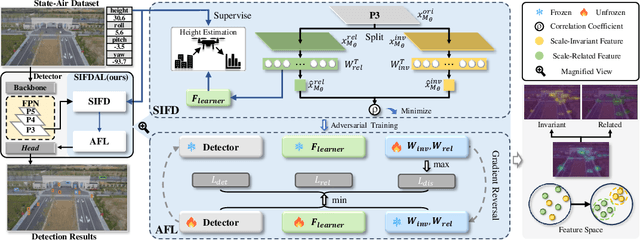
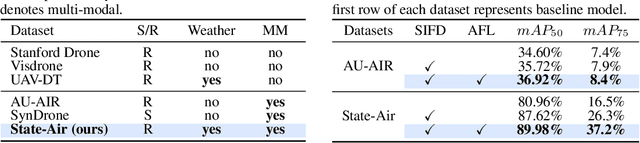
Detecting objects from Unmanned Aerial Vehicles (UAV) is often hindered by a large number of small objects, resulting in low detection accuracy. To address this issue, mainstream approaches typically utilize multi-stage inferences. Despite their remarkable detecting accuracies, real-time efficiency is sacrificed, making them less practical to handle real applications. To this end, we propose to improve the single-stage inference accuracy through learning scale-invariant features. Specifically, a Scale-Invariant Feature Disentangling module is designed to disentangle scale-related and scale-invariant features. Then an Adversarial Feature Learning scheme is employed to enhance disentanglement. Finally, scale-invariant features are leveraged for robust UAV-based object detection. Furthermore, we construct a multi-modal UAV object detection dataset, State-Air, which incorporates annotated UAV state parameters. We apply our approach to three state-of-the-art lightweight detection frameworks on three benchmark datasets, including State-Air. Extensive experiments demonstrate that our approach can effectively improve model accuracy. Our code and dataset are provided in Supplementary Materials and will be publicly available once the paper is accepted.