 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgent Security is a Systems Problem
May 20, 2026We take the position that agent security must be approached as a systems problem: the AI model powering the agent must be treated as an untrusted component, and security invariants must be enforced at the system level. Through this lens, efforts to increase model robustness (the dominant viewpoint in the community) are insufficient on their own. Instead, we must complement existing efforts with techniques from the systems security domain. Based on our experience as cybersecurity researchers in operating systems, networks, formal methods, and adversarial machine learning, we articulate a set of core principles, grounded in decades of systems security research, that provide a foundation for designing agentic systems with predictable guarantees. As evidence, we analyze eleven representative real-world attacks on agents and discuss how systems principles, if realized, could have prevented these attacks. We also identify the research challenges that stand in the way of implementing these principles in agents.
CocoaBench: Evaluating Unified Digital Agents in the Wild
Apr 14, 2026LLM agents now perform strongly in software engineering, deep research, GUI automation, and various other applications, while recent agent scaffolds and models are increasingly integrating these capabilities into unified systems. Yet, most evaluations still test these capabilities in isolation, which leaves a gap for more diverse use cases that require agents to combine different capabilities. We introduce CocoaBench, a benchmark for unified digital agents built from human-designed, long-horizon tasks that require flexible composition of vision, search, and coding. Tasks are specified only by an instruction and an automatic evaluation function over the final output, enabling reliable and scalable evaluation across diverse agent infrastructures. We also present CocoaAgent, a lightweight shared scaffold for controlled comparison across model backbones. Experiments show that current agents remain far from reliable on CocoaBench, with the best evaluated system achieving only 45.1% success rate. Our analysis further points to substantial room for improvement in reasoning and planning, tool use and execution, and visual grounding.
How Vulnerable Are AI Agents to Indirect Prompt Injections? Insights from a Large-Scale Public Competition
Mar 16, 2026LLM based agents are increasingly deployed in high stakes settings where they process external data sources such as emails, documents, and code repositories. This creates exposure to indirect prompt injection attacks, where adversarial instructions embedded in external content manipulate agent behavior without user awareness. A critical but underexplored dimension of this threat is concealment: since users tend to observe only an agent's final response, an attack can conceal its existence by presenting no clue of compromise in the final user facing response while successfully executing harmful actions. This leaves users unaware of the manipulation and likely to accept harmful outcomes as legitimate. We present findings from a large scale public red teaming competition evaluating this dual objective across three agent settings: tool calling, coding, and computer use. The competition attracted 464 participants who submitted 272000 attack attempts against 13 frontier models, yielding 8648 successful attacks across 41 scenarios. All models proved vulnerable, with attack success rates ranging from 0.5% (Claude Opus 4.5) to 8.5% (Gemini 2.5 Pro). We identify universal attack strategies that transfer across 21 of 41 behaviors and multiple model families, suggesting fundamental weaknesses in instruction following architectures. Capability and robustness showed weak correlation, with Gemini 2.5 Pro exhibiting both high capability and high vulnerability. To address benchmark saturation and obsoleteness, we will endeavor to deliver quarterly updates through continued red teaming competitions. We open source the competition environment for use in evaluations, along with 95 successful attacks against Qwen that did not transfer to any closed source model. We share model-specific attack data with respective frontier labs and the full dataset with the UK AISI and US CAISI to support robustness research.
Training Language Models to Generate Quality Code with Program Analysis Feedback
May 28, 2025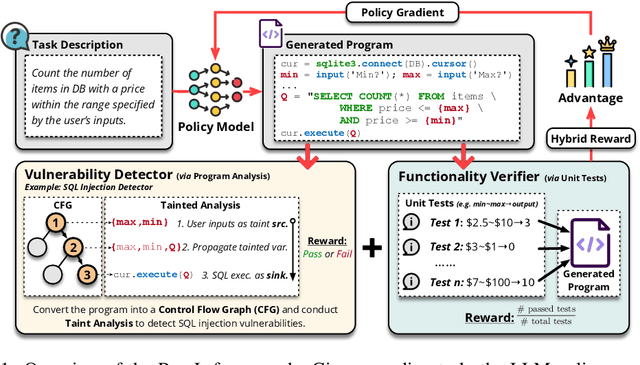

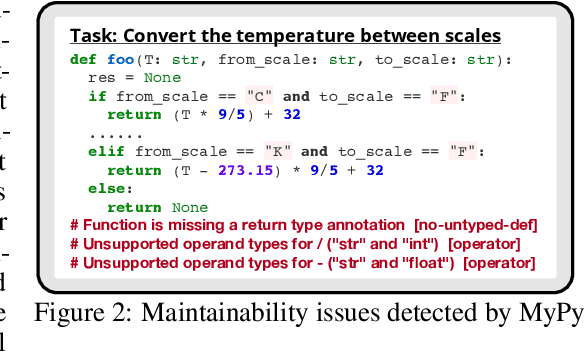
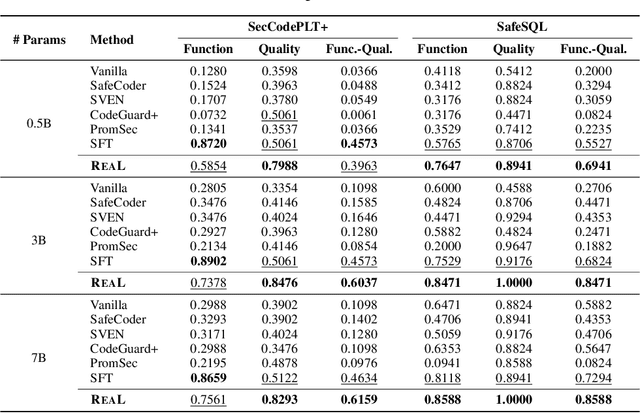
Code generation with large language models (LLMs), often termed vibe coding, is increasingly adopted in production but fails to ensure code quality, particularly in security (e.g., SQL injection vulnerabilities) and maintainability (e.g., missing type annotations). Existing methods, such as supervised fine-tuning and rule-based post-processing, rely on labor-intensive annotations or brittle heuristics, limiting their scalability and effectiveness. We propose REAL, a reinforcement learning framework that incentivizes LLMs to generate production-quality code using program analysis-guided feedback. Specifically, REAL integrates two automated signals: (1) program analysis detecting security or maintainability defects and (2) unit tests ensuring functional correctness. Unlike prior work, our framework is prompt-agnostic and reference-free, enabling scalable supervision without manual intervention. Experiments across multiple datasets and model scales demonstrate that REAL outperforms state-of-the-art methods in simultaneous assessments of functionality and code quality. Our work bridges the gap between rapid prototyping and production-ready code, enabling LLMs to deliver both speed and quality.
Matching Skeleton-based Activity Representations with Heterogeneous Signals for HAR
Mar 17, 2025In human activity recognition (HAR), activity labels have typically been encoded in one-hot format, which has a recent shift towards using textual representations to provide contextual knowledge. Here, we argue that HAR should be anchored to physical motion data, as motion forms the basis of activity and applies effectively across sensing systems, whereas text is inherently limited. We propose SKELAR, a novel HAR framework that pretrains activity representations from skeleton data and matches them with heterogeneous HAR signals. Our method addresses two major challenges: (1) capturing core motion knowledge without context-specific details. We achieve this through a self-supervised coarse angle reconstruction task that recovers joint rotation angles, invariant to both users and deployments; (2) adapting the representations to downstream tasks with varying modalities and focuses. To address this, we introduce a self-attention matching module that dynamically prioritizes relevant body parts in a data-driven manner. Given the lack of corresponding labels in existing skeleton data, we establish MASD, a new HAR dataset with IMU, WiFi, and skeleton, collected from 20 subjects performing 27 activities. This is the first broadly applicable HAR dataset with time-synchronized data across three modalities. Experiments show that SKELAR achieves the state-of-the-art performance in both full-shot and few-shot settings. We also demonstrate that SKELAR can effectively leverage synthetic skeleton data to extend its use in scenarios without skeleton collections.
Physics-Informed Data Denoising for Real-Life Sensing Systems
Nov 12, 2023
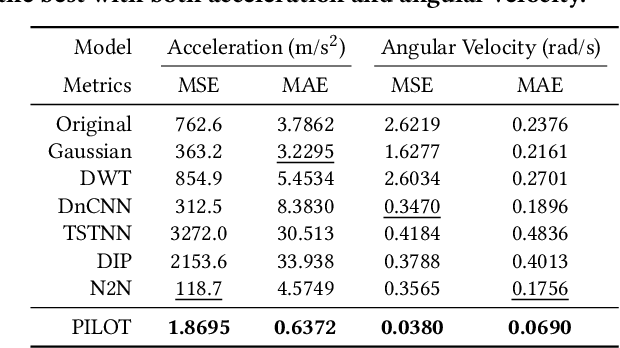


Sensors measuring real-life physical processes are ubiquitous in today's interconnected world. These sensors inherently bear noise that often adversely affects performance and reliability of the systems they support. Classic filtering-based approaches introduce strong assumptions on the time or frequency characteristics of sensory measurements, while learning-based denoising approaches typically rely on using ground truth clean data to train a denoising model, which is often challenging or prohibitive to obtain for many real-world applications. We observe that in many scenarios, the relationships between different sensor measurements (e.g., location and acceleration) are analytically described by laws of physics (e.g., second-order differential equation). By incorporating such physics constraints, we can guide the denoising process to improve even in the absence of ground truth data. In light of this, we design a physics-informed denoising model that leverages the inherent algebraic relationships between different measurements governed by the underlying physics. By obviating the need for ground truth clean data, our method offers a practical denoising solution for real-world applications. We conducted experiments in various domains, including inertial navigation, CO2 monitoring, and HVAC control, and achieved state-of-the-art performance compared with existing denoising methods. Our method can denoise data in real time (4ms for a sequence of 1s) for low-cost noisy sensors and produces results that closely align with those from high-precision, high-cost alternatives, leading to an efficient, cost-effective approach for more accurate sensor-based systems.
Misusing Tools in Large Language Models With Visual Adversarial Examples
Oct 04, 2023



Large Language Models (LLMs) are being enhanced with the ability to use tools and to process multiple modalities. These new capabilities bring new benefits and also new security risks. In this work, we show that an attacker can use visual adversarial examples to cause attacker-desired tool usage. For example, the attacker could cause a victim LLM to delete calendar events, leak private conversations and book hotels. Different from prior work, our attacks can affect the confidentiality and integrity of user resources connected to the LLM while being stealthy and generalizable to multiple input prompts. We construct these attacks using gradient-based adversarial training and characterize performance along multiple dimensions. We find that our adversarial images can manipulate the LLM to invoke tools following real-world syntax almost always (~98%) while maintaining high similarity to clean images (~0.9 SSIM). Furthermore, using human scoring and automated metrics, we find that the attacks do not noticeably affect the conversation (and its semantics) between the user and the LLM.
B2RL: An open-source Dataset for Building Batch Reinforcement Learning
Sep 30, 2022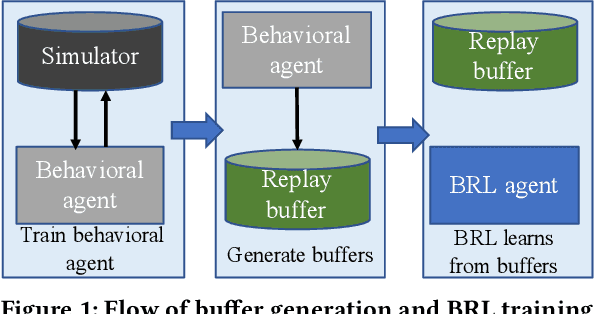
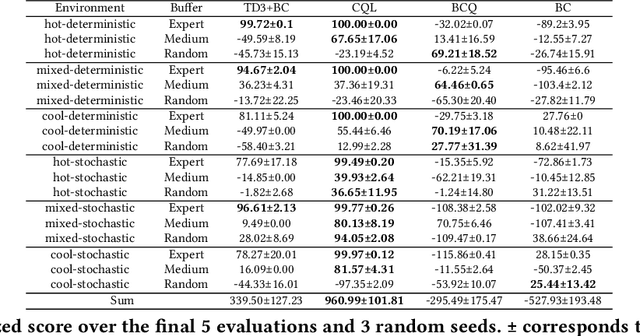
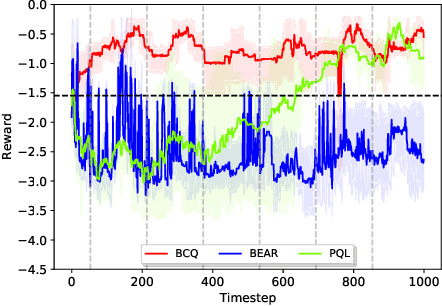
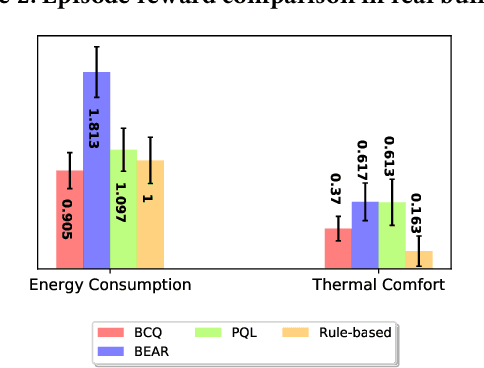
Batch reinforcement learning (BRL) is an emerging research area in the RL community. It learns exclusively from static datasets (i.e. replay buffers) without interaction with the environment. In the offline settings, existing replay experiences are used as prior knowledge for BRL models to find the optimal policy. Thus, generating replay buffers is crucial for BRL model benchmark. In our B2RL (Building Batch RL) dataset, we collected real-world data from our building management systems, as well as buffers generated by several behavioral policies in simulation environments. We believe it could help building experts on BRL research. To the best of our knowledge, we are the first to open-source building datasets for the purpose of BRL learning.
Modeling unknown dynamical systems with hidden parameters
Feb 03, 2022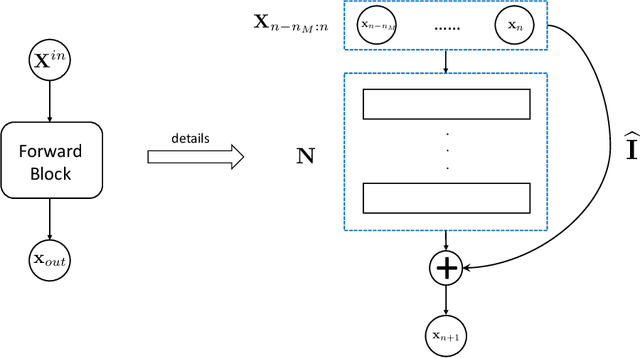

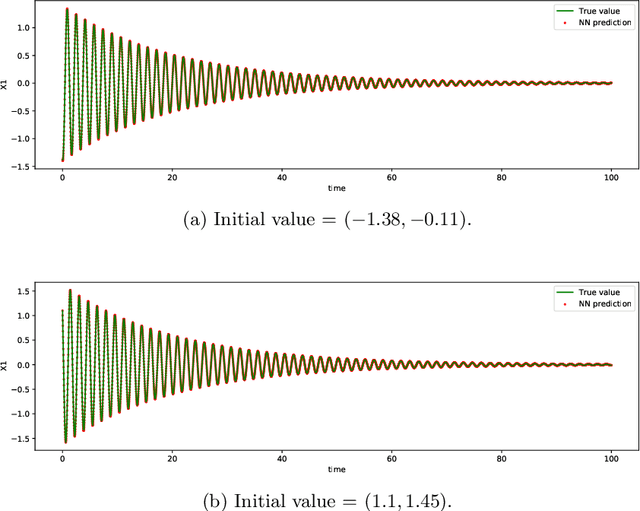
We present a data-driven numerical approach for modeling unknown dynamical systems with missing/hidden parameters. The method is based on training a deep neural network (DNN) model for the unknown system using its trajectory data. A key feature is that the unknown dynamical system contains system parameters that are completely hidden, in the sense that no information about the parameters is available through either the measurement trajectory data or our prior knowledge of the system. We demonstrate that by training a DNN using the trajectory data with sufficient time history, the resulting DNN model can accurately model the unknown dynamical system. For new initial conditions associated with new, and unknown, system parameters, the DNN model can produce accurate system predictions over longer time.
Learning reduced systems via deep neural networks with memory
Apr 19, 2020
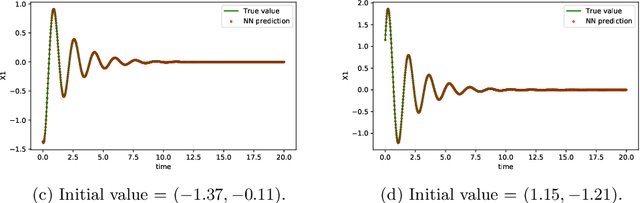
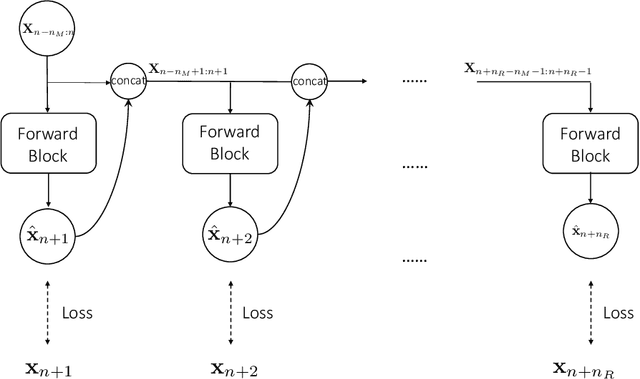
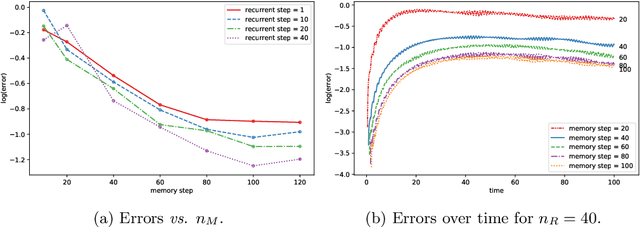
We present a general numerical approach for constructing governing equations for unknown dynamical systems when only data on a subset of the state variables are available. The unknown equations for these observed variables are thus a reduced system of the complete set of state variables. Reduced systems possess memory integrals, based on the well known Mori-Zwanzig (MZ) formulism. Our numerical strategy to recover the reduced system starts by formulating a discrete approximation of the memory integral in the MZ formulation. The resulting unknown approximate MZ equations are of finite dimensional, in the sense that a finite number of past history data are involved. We then present a deep neural network structure that directly incorporates the history terms to produce memory in the network. The approach is suitable for any practical systems with finite memory length. We then use a set of numerical examples to demonstrate the effectiveness of our method.