 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Recall or Relevance? A Multi-Task Multi-Head Approach for Item-to-Item Retrieval in Recommendation
Jun 06, 2025The task of item-to-item (I2I) retrieval is to identify a set of relevant and highly engaging items based on a given trigger item. It is a crucial component in modern recommendation systems, where users' previously engaged items serve as trigger items to retrieve relevant content for future engagement. However, existing I2I retrieval models in industry are primarily built on co-engagement data and optimized using the recall measure, which overly emphasizes co-engagement patterns while failing to capture semantic relevance. This often leads to overfitting short-term co-engagement trends at the expense of long-term benefits such as discovering novel interests and promoting content diversity. To address this challenge, we propose MTMH, a Multi-Task and Multi-Head I2I retrieval model that achieves both high recall and semantic relevance. Our model consists of two key components: 1) a multi-task learning loss for formally optimizing the trade-off between recall and semantic relevance, and 2) a multi-head I2I retrieval architecture for retrieving both highly co-engaged and semantically relevant items. We evaluate MTMH using proprietary data from a commercial platform serving billions of users and demonstrate that it can improve recall by up to 14.4% and semantic relevance by up to 56.6% compared with prior state-of-the-art models. We also conduct live experiments to verify that MTMH can enhance both short-term consumption metrics and long-term user-experience-related metrics. Our work provides a principled approach for jointly optimizing I2I recall and semantic relevance, which has significant implications for improving the overall performance of recommendation systems.
Modeling unknown dynamical systems with hidden parameters
Feb 03, 2022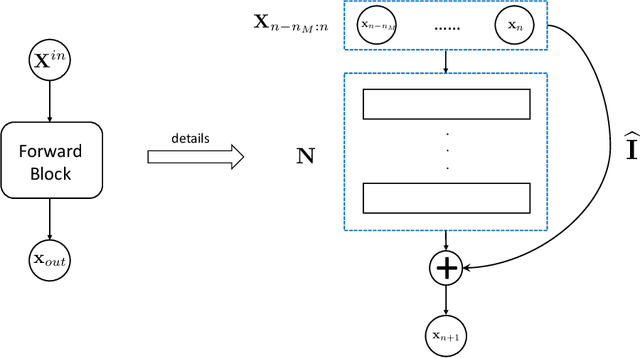
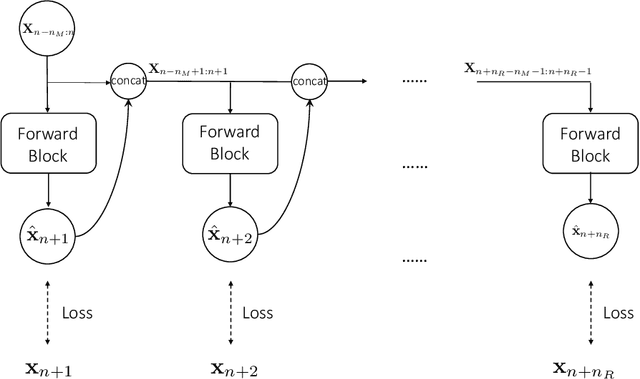
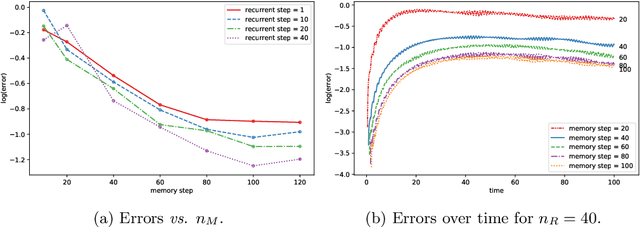

We present a data-driven numerical approach for modeling unknown dynamical systems with missing/hidden parameters. The method is based on training a deep neural network (DNN) model for the unknown system using its trajectory data. A key feature is that the unknown dynamical system contains system parameters that are completely hidden, in the sense that no information about the parameters is available through either the measurement trajectory data or our prior knowledge of the system. We demonstrate that by training a DNN using the trajectory data with sufficient time history, the resulting DNN model can accurately model the unknown dynamical system. For new initial conditions associated with new, and unknown, system parameters, the DNN model can produce accurate system predictions over longer time.