 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModeling unknown dynamical systems with hidden parameters
Feb 03, 2022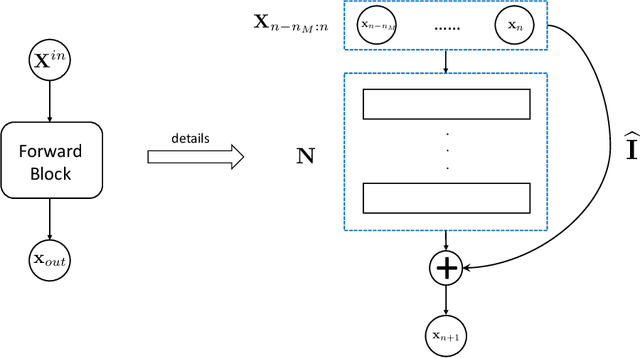

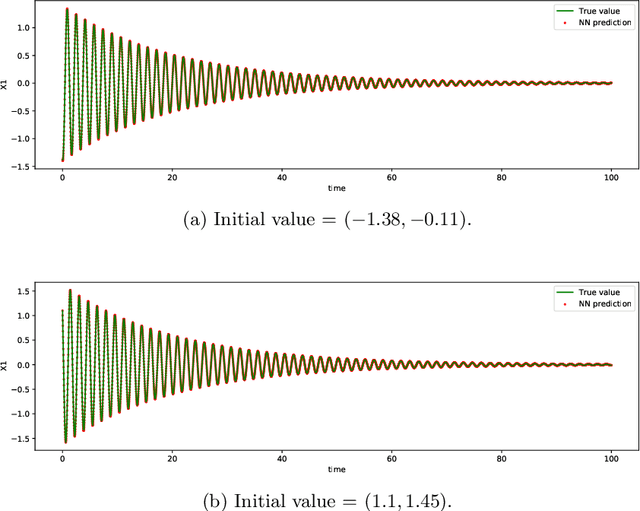
We present a data-driven numerical approach for modeling unknown dynamical systems with missing/hidden parameters. The method is based on training a deep neural network (DNN) model for the unknown system using its trajectory data. A key feature is that the unknown dynamical system contains system parameters that are completely hidden, in the sense that no information about the parameters is available through either the measurement trajectory data or our prior knowledge of the system. We demonstrate that by training a DNN using the trajectory data with sufficient time history, the resulting DNN model can accurately model the unknown dynamical system. For new initial conditions associated with new, and unknown, system parameters, the DNN model can produce accurate system predictions over longer time.
Learning reduced systems via deep neural networks with memory
Apr 19, 2020
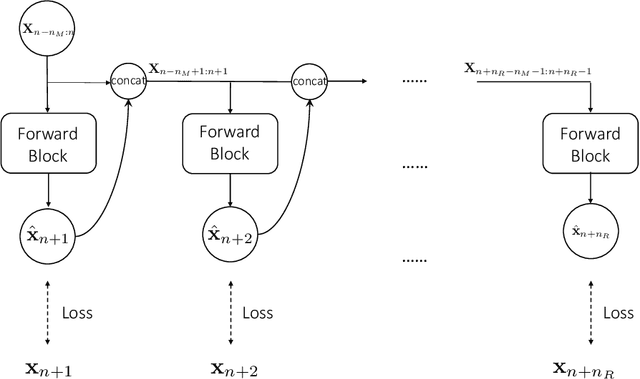
We present a general numerical approach for constructing governing equations for unknown dynamical systems when only data on a subset of the state variables are available. The unknown equations for these observed variables are thus a reduced system of the complete set of state variables. Reduced systems possess memory integrals, based on the well known Mori-Zwanzig (MZ) formulism. Our numerical strategy to recover the reduced system starts by formulating a discrete approximation of the memory integral in the MZ formulation. The resulting unknown approximate MZ equations are of finite dimensional, in the sense that a finite number of past history data are involved. We then present a deep neural network structure that directly incorporates the history terms to produce memory in the network. The approach is suitable for any practical systems with finite memory length. We then use a set of numerical examples to demonstrate the effectiveness of our method.