 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBounded and Uniform Energy-based Out-of-distribution Detection for Graphs
Apr 18, 2025Given the critical role of graphs in real-world applications and their high-security requirements, improving the ability of graph neural networks (GNNs) to detect out-of-distribution (OOD) data is an urgent research problem. The recent work GNNSAFE proposes a framework based on the aggregation of negative energy scores that significantly improves the performance of GNNs to detect node-level OOD data. However, our study finds that score aggregation among nodes is susceptible to extreme values due to the unboundedness of the negative energy scores and logit shifts, which severely limits the accuracy of GNNs in detecting node-level OOD data. In this paper, we propose NODESAFE: reducing the generation of extreme scores of nodes by adding two optimization terms that make the negative energy scores bounded and mitigate the logit shift. Experimental results show that our approach dramatically improves the ability of GNNs to detect OOD data at the node level, e.g., in detecting OOD data induced by Structure Manipulation, the metric of FPR95 (lower is better) in scenarios without (with) OOD data exposure are reduced from the current SOTA by 28.4% (22.7%).
NodeReg: Mitigating the Imbalance and Distribution Shift Effects in Semi-Supervised Node Classification via Norm Consistency
Mar 05, 2025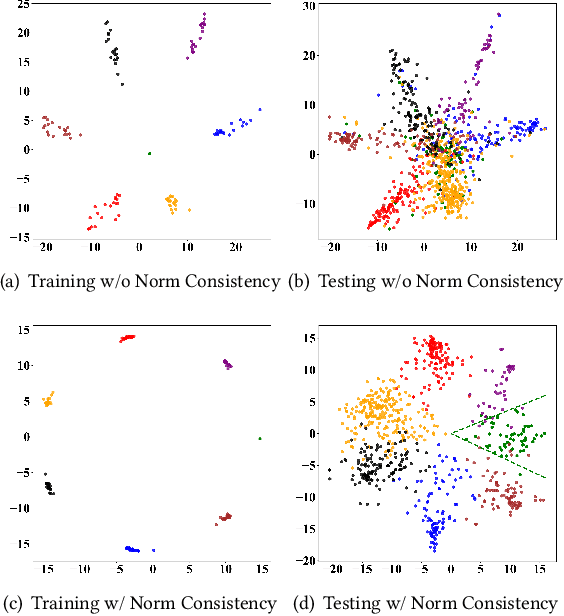



Aggregating information from neighboring nodes benefits graph neural networks (GNNs) in semi-supervised node classification tasks. Nevertheless, this mechanism also renders nodes susceptible to the influence of their neighbors. For instance, this will occur when the neighboring nodes are imbalanced or the neighboring nodes contain noise, which can even affect the GNN's ability to generalize out of distribution. We find that ensuring the consistency of the norm for node representations can significantly reduce the impact of these two issues on GNNs. To this end, we propose a regularized optimization method called NodeReg that enforces the consistency of node representation norms. This method is simple but effective and satisfies Lipschitz continuity, thus facilitating stable optimization and significantly improving semi-supervised node classification performance under the above two scenarios. To illustrate, in the imbalance scenario, when training a GCN with an imbalance ratio of 0.1, NodeReg outperforms the most competitive baselines by 1.4%-25.9% in F1 score across five public datasets. Similarly, in the distribution shift scenario, NodeReg outperforms the most competitive baseline by 1.4%-3.1% in accuracy.
Category-free Out-of-Distribution Node Detection with Feature Resonance
Feb 22, 2025Detecting out-of-distribution (OOD) nodes in the graph-based machine-learning field is challenging, particularly when in-distribution (ID) node multi-category labels are unavailable. Thus, we focus on feature space rather than label space and find that, ideally, during the optimization of known ID samples, unknown ID samples undergo more significant representation changes than OOD samples, even if the model is trained to fit random targets, which we called the Feature Resonance phenomenon. The rationale behind it is that even without gold labels, the local manifold may still exhibit smooth resonance. Based on this, we further develop a novel graph OOD framework, dubbed Resonance-based Separation and Learning (RSL), which comprises two core modules: (i) a more practical micro-level proxy of feature resonance that measures the movement of feature vectors in one training step. (ii) integrate with synthetic OOD nodes strategy to train an effective OOD classifier. Theoretically, we derive an error bound showing the superior separability of OOD nodes during the resonance period. Empirically, RSL achieves state-of-the-art performance, reducing the FPR95 metric by an average of 18.51% across five real-world datasets.
Better Knowledge Enhancement for Privacy-Preserving Cross-Project Defect Prediction
Dec 23, 2024Cross-Project Defect Prediction (CPDP) poses a non-trivial challenge to construct a reliable defect predictor by leveraging data from other projects, particularly when data owners are concerned about data privacy. In recent years, Federated Learning (FL) has become an emerging paradigm to guarantee privacy information by collaborative training a global model among multiple parties without sharing raw data. While the direct application of FL to the CPDP task offers a promising solution to address privacy concerns, the data heterogeneity arising from proprietary projects across different companies or organizations will bring troubles for model training. In this paper, we study the privacy-preserving cross-project defect prediction with data heterogeneity under the federated learning framework. To address this problem, we propose a novel knowledge enhancement approach named FedDP with two simple but effective solutions: 1. Local Heterogeneity Awareness and 2. Global Knowledge Distillation. Specifically, we employ open-source project data as the distillation dataset and optimize the global model with the heterogeneity-aware local model ensemble via knowledge distillation. Experimental results on 19 projects from two datasets demonstrate that our method significantly outperforms baselines.
CARMA: Context-Aware Runtime Reconfiguration for Energy-Efficient Sensor Fusion
Jun 27, 2023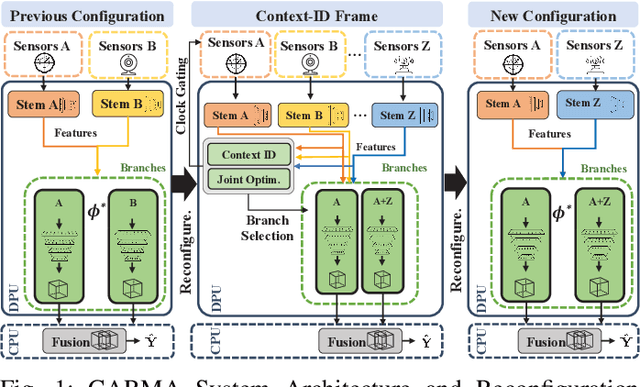
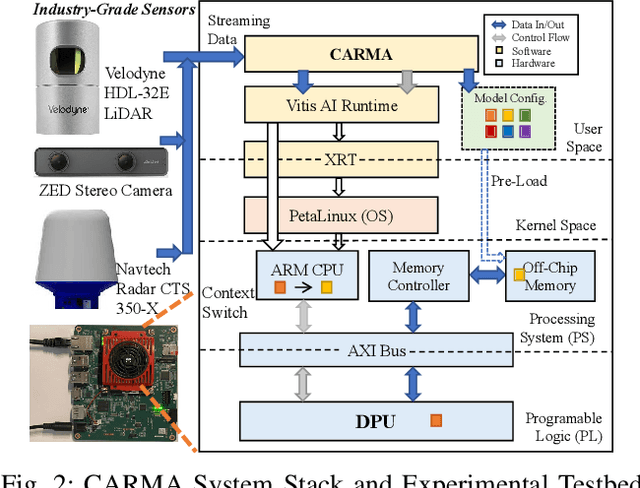
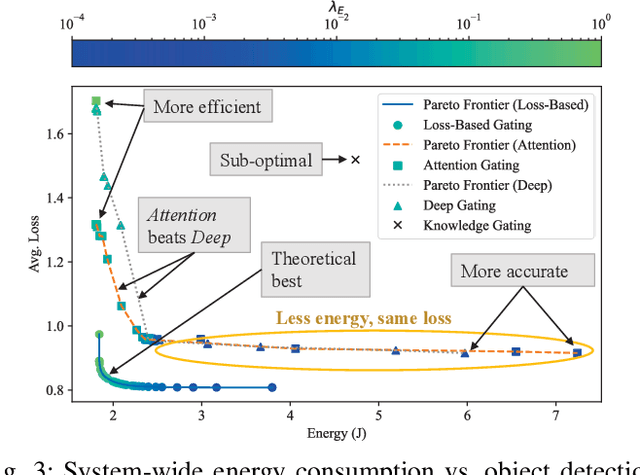
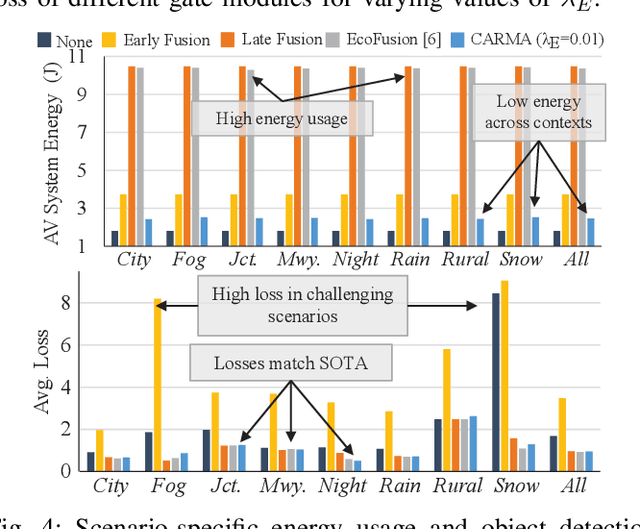
Autonomous systems (AS) are systems that can adapt and change their behavior in response to unanticipated events and include systems such as aerial drones, autonomous vehicles, and ground/aquatic robots. AS require a wide array of sensors, deep-learning models, and powerful hardware platforms to perceive and safely operate in real-time. However, in many contexts, some sensing modalities negatively impact perception while increasing the system's overall energy consumption. Since AS are often energy-constrained edge devices, energy-efficient sensor fusion methods have been proposed. However, existing methods either fail to adapt to changing scenario conditions or to optimize energy efficiency system-wide. We propose CARMA: a context-aware sensor fusion approach that uses context to dynamically reconfigure the computation flow on a Field-Programmable Gate Array (FPGA) at runtime. By clock-gating unused sensors and model sub-components, CARMA significantly reduces the energy used by a multi-sensory object detector without compromising performance. We use a Deep-learning Processor Unit (DPU) based reconfiguration approach to minimize the latency of model reconfiguration. We evaluate multiple context-identification strategies, propose a novel system-wide energy-performance joint optimization, and evaluate scenario-specific perception performance. Across challenging real-world sensing contexts, CARMA outperforms state-of-the-art methods with up to 1.3x speedup and 73% lower energy consumption.