 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Sampling for Non-Line-of-Sight Imaging Using Modified Fast Fourier Transforms
Jan 09, 2025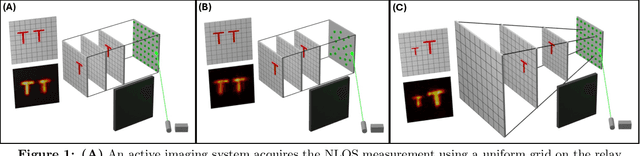
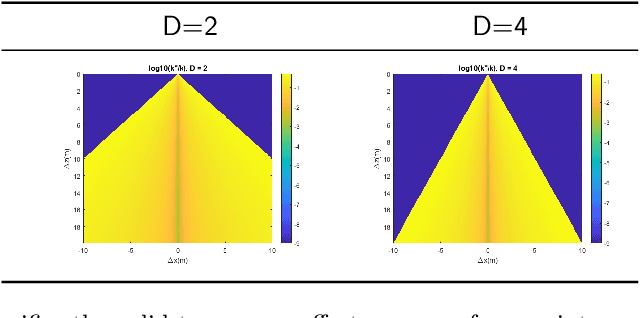
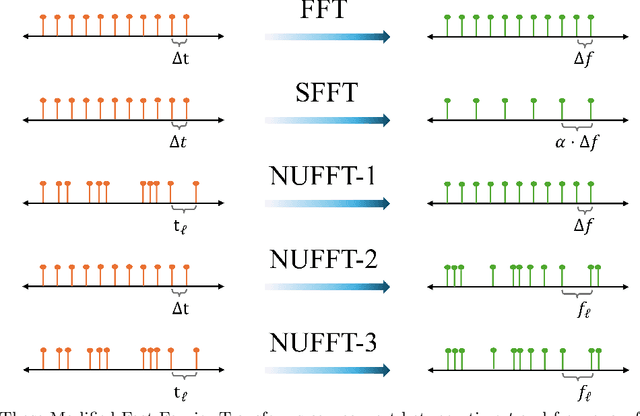
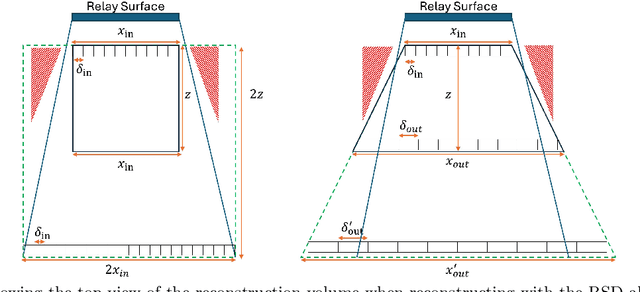
Non-line-of-Sight (NLOS) imaging systems collect light at a diffuse relay surface and input this measurement into computational algorithms that output a 3D volumetric reconstruction. These algorithms utilize the Fast Fourier Transform (FFT) to accelerate the reconstruction process but require both input and output to be sampled spatially with uniform grids. However, the geometry of NLOS imaging inherently results in non-uniform sampling on the relay surface when using multi-pixel detector arrays, even though such arrays significantly reduce acquisition times. Furthermore, using these arrays increases the data rate required for sensor readout, posing challenges for real-world deployment. In this work, we utilize the phasor field framework to demonstrate that existing NLOS imaging setups typically oversample the relay surface spatially, explaining why the measurement can be compressed without significantly sacrificing reconstruction quality. This enables us to utilize the Non-Uniform Fast Fourier Transform (NUFFT) to reconstruct from sparse measurements acquired from irregularly sampled relay surfaces of arbitrary shapes. Furthermore, we utilize the NUFFT to reconstruct at arbitrary locations in the hidden volume, ensuring flexible sampling schemes for both the input and output. Finally, we utilize the Scaled Fast Fourier Transform (SFFT) to reconstruct larger volumes without increasing the number of samples stored in memory. All algorithms introduced in this paper preserve the computational complexity of FFT-based methods, ensuring scalability for practical NLOS imaging applications.
Physics to the Rescue: Deep Non-line-of-sight Reconstruction for High-speed Imaging
May 03, 2022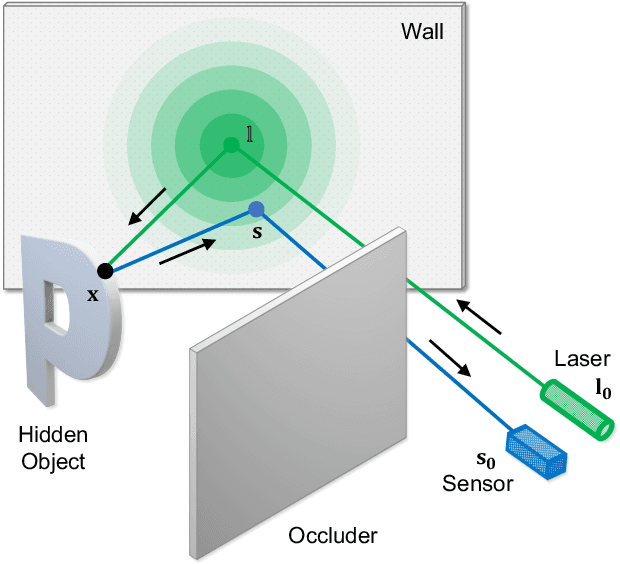
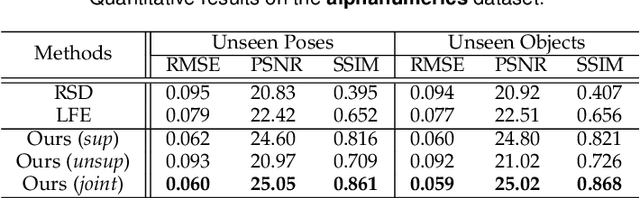
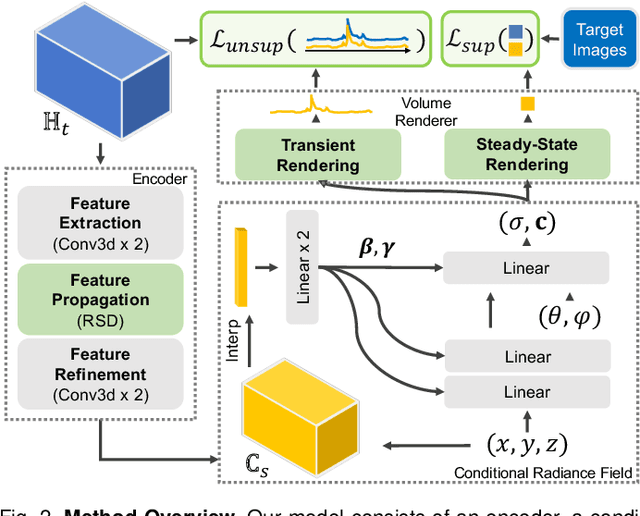
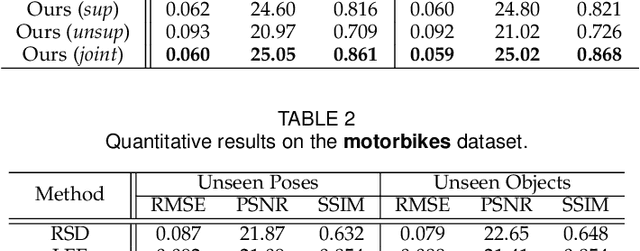
Computational approach to imaging around the corner, or non-line-of-sight (NLOS) imaging, is becoming a reality thanks to major advances in imaging hardware and reconstruction algorithms. A recent development towards practical NLOS imaging, Nam et al. demonstrated a high-speed non-confocal imaging system that operates at 5Hz, 100x faster than the prior art. This enormous gain in acquisition rate, however, necessitates numerous approximations in light transport, breaking many existing NLOS reconstruction methods that assume an idealized image formation model. To bridge the gap, we present a novel deep model that incorporates the complementary physics priors of wave propagation and volume rendering into a neural network for high-quality and robust NLOS reconstruction. This orchestrated design regularizes the solution space by relaxing the image formation model, resulting in a deep model that generalizes well on real captures despite being exclusively trained on synthetic data. Further, we devise a unified learning framework that enables our model to be flexibly trained using diverse supervision signals, including target intensity images or even raw NLOS transient measurements. Once trained, our model renders both intensity and depth images at inference time in a single forward pass, capable of processing more than 5 captures per second on a high-end GPU. Through extensive qualitative and quantitative experiments, we show that our method outperforms prior physics and learning based approaches on both synthetic and real measurements. We anticipate that our method along with the fast capturing system will accelerate future development of NLOS imaging for real world applications that require high-speed imaging.
Virtual light transport matrices for non-line-of-sight imaging
Mar 23, 2021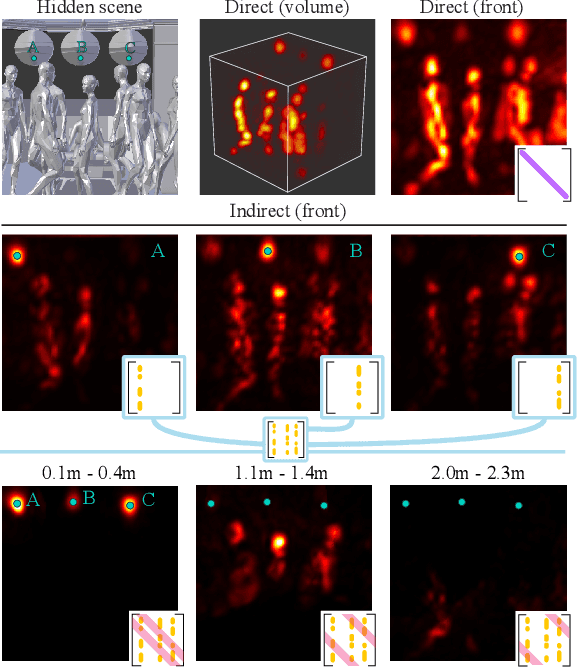
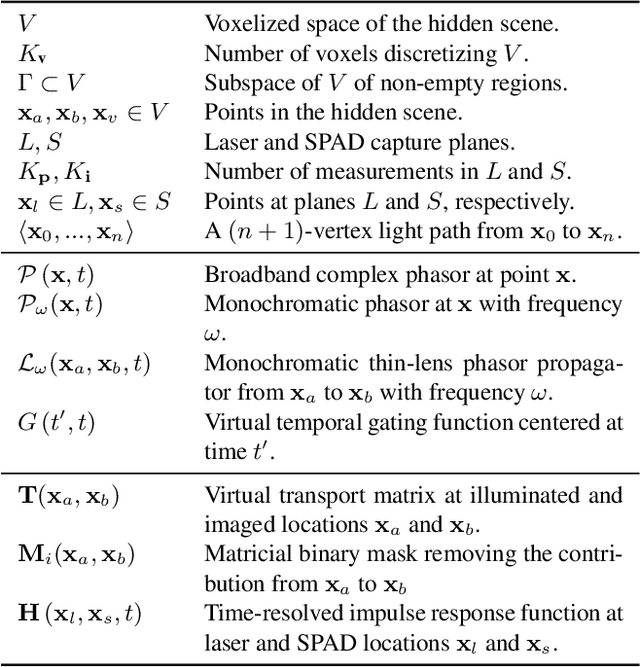
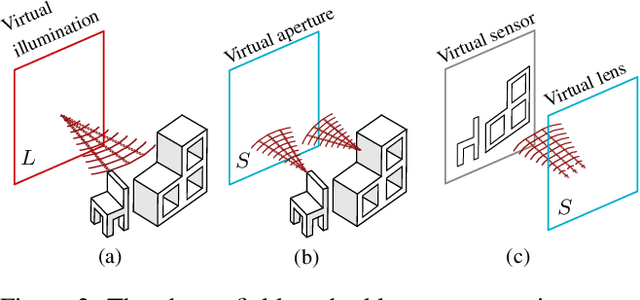
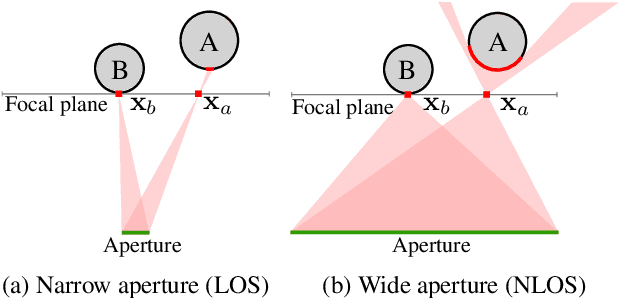
The light transport matrix (LTM) is an instrumental tool in line-of-sight (LOS) imaging, describing how light interacts with the scene and enabling applications such as relighting or separation of illumination components. We introduce a framework to estimate the LTM of non-line-of-sight (NLOS) scenarios, coupling recent virtual forward light propagation models for NLOS imaging with the LOS light transport equation. We design computational projector-camera setups, and use these virtual imaging systems to estimate the transport matrix of hidden scenes. We introduce the specific illumination functions to compute the different elements of the matrix, overcoming the challenging wide-aperture conditions of NLOS setups. Our NLOS light transport matrix allows us to (re)illuminate specific locations of a hidden scene, and separate direct, first-order indirect, and higher-order indirect illumination of complex cluttered hidden scenes, similar to existing LOS techniques.
Real-time Non-line-of-Sight imaging of dynamic scenes
Oct 24, 2020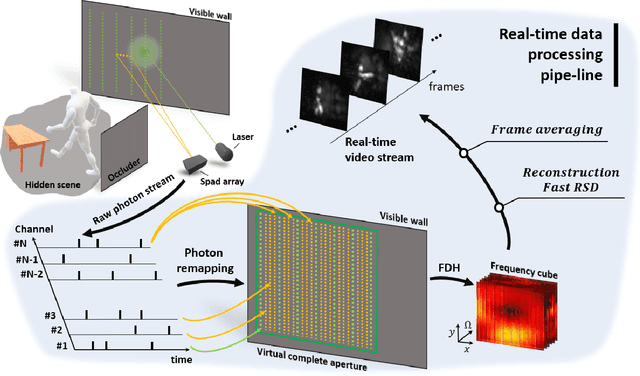
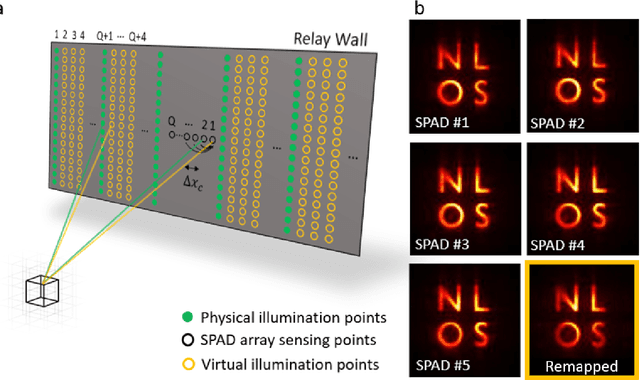
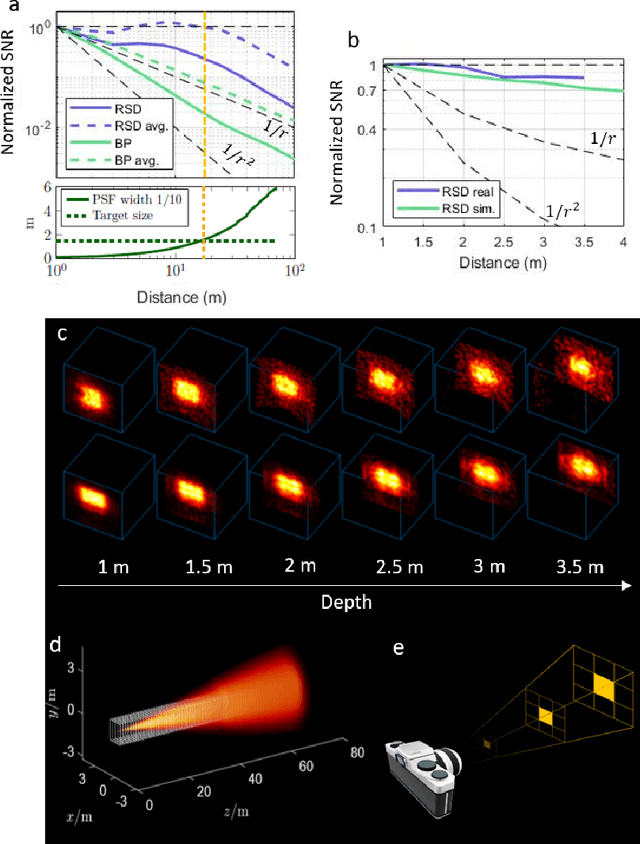
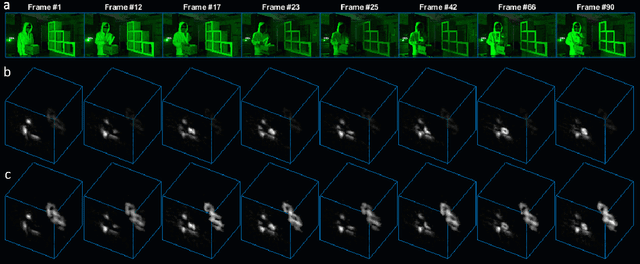
Non-Line-of-Sight (NLOS) imaging aims at recovering the 3D geometry of objects that are hidden from the direct line of sight. In the past, this method has suffered from the weak available multibounce signal limiting scene size, capture speed, and reconstruction quality. While algorithms capable of reconstructing scenes at several frames per second have been demonstrated, real-time NLOS video has only been demonstrated for retro-reflective objects where the NLOS signal strength is enhanced by 4 orders of magnitude or more. Furthermore, it has also been noted that the signal-to-noise ratio of reconstructions in NLOS methods drops quickly with distance and past reconstructions, therefore, have been limited to small scenes with depths of few meters. Actual models of noise and resolution in the scene have been simplistic, ignoring many of the complexities of the problem. We show that SPAD (Single-Photon Avalanche Diode) array detectors with a total of just 28 pixels combined with a specifically extended Phasor Field reconstruction algorithm can reconstruct live real-time videos of non-retro-reflective NLOS scenes. We provide an analysis of the Signal-to-Noise-Ratio (SNR) of our reconstructions and show that for our method it is possible to reconstruct the scene such that SNR, motion blur, angular resolution, and depth resolution are all independent of scene size suggesting that reconstruction of very large scenes may be possible. In the future, the light efficiency for NLOS imaging systems can be improved further by adding more pixels to the sensor array.
Optimizing AD Pruning of Sponsored Search with Reinforcement Learning
Aug 05, 2020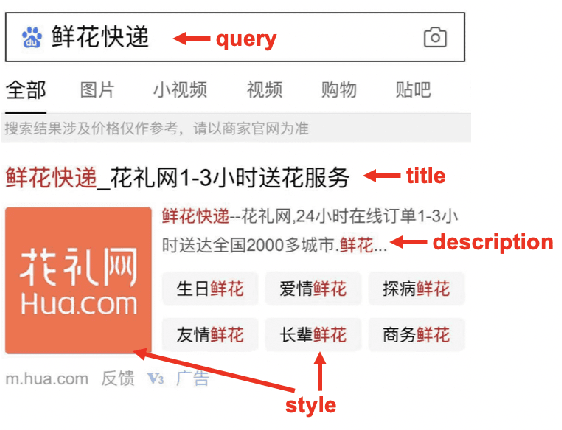
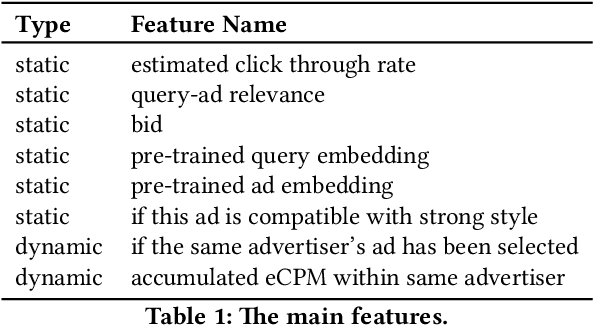
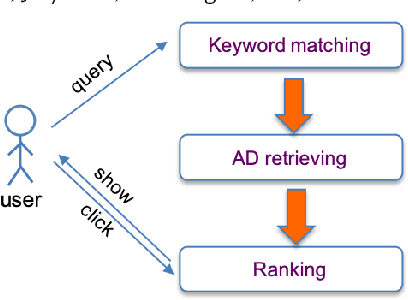
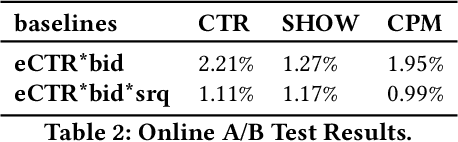
Industrial sponsored search system (SSS) can be logically divided into three modules: keywords matching, ad retrieving, and ranking. During ad retrieving, the ad candidates grow exponentially. A query with high commercial value might retrieve a great deal of ad candidates such that the ranking module could not afford. Due to limited latency and computing resources, the candidates have to be pruned earlier. Suppose we set a pruning line to cut SSS into two parts: upstream and downstream. The problem we are going to address is: how to pick out the best $K$ items from $N$ candidates provided by the upstream to maximize the total system's revenue. Since the industrial downstream is very complicated and updated quickly, a crucial restriction in this problem is that the selection scheme should get adapted to the downstream. In this paper, we propose a novel model-free reinforcement learning approach to fixing this problem. Our approach considers downstream as a black-box environment, and the agent sequentially selects items and finally feeds into the downstream, where revenue would be estimated and used as a reward to improve the selection policy. To the best of our knowledge, this is first time to consider the system optimization from a downstream adaption view. It is also the first time to use reinforcement learning techniques to tackle this problem. The idea has been successfully realized in Baidu's sponsored search system, and online long time A/B test shows remarkable improvements on revenue.
Virtual Wave Optics for Non-Line-of-Sight Imaging
Oct 17, 2018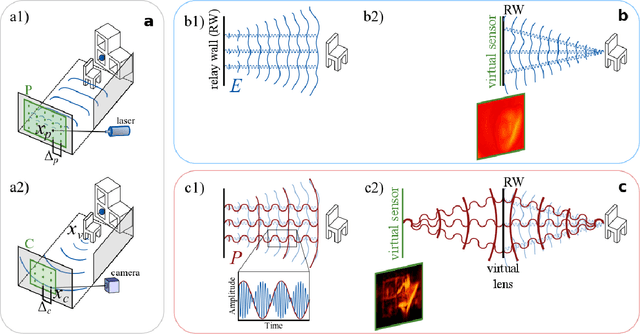
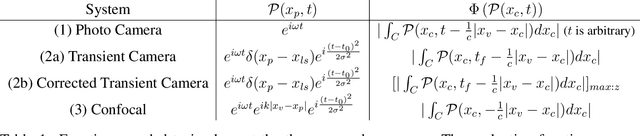
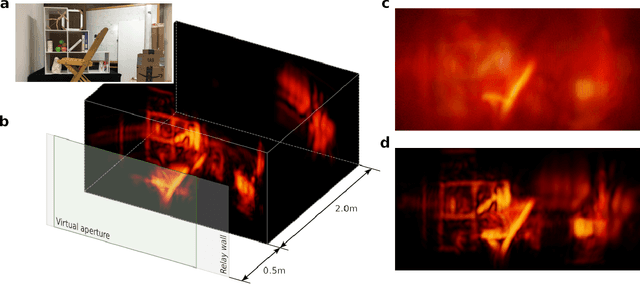

Non-Line-of-Sight (NLOS) imaging allows to observe objects partially or fully occluded from direct view, by analyzing indirect diffuse reflections off a secondary, relay surface. Despite its many potential applications, existing methods lack practical usability due to several shared limitations, including the assumption of single scattering only, lack of occlusions, and Lambertian reflectance. We lift these limitations by transforming the NLOS problem into a virtual Line-Of-Sight (LOS) one. Since imaging information cannot be recovered from the irradiance arriving at the relay surface, we introduce the concept of the phasor field, a mathematical construct representing a fast variation in irradiance. We show that NLOS light transport can be modeled as the propagation of a phasor field wave, which can be solved accurately by the Rayleigh-Sommerfeld diffraction integral. We demonstrate for the first time NLOS reconstruction of complex scenes with strong multiply scattered and ambient light, arbitrary materials, large depth range, and occlusions. Our method handles these challenging cases without explicitly developing a light transport model. By leveraging existing fast algorithms, we outperform existing methods in terms of execution speed, computational complexity, and memory use. We believe that our approach will help unlock the potential of NLOS imaging, and the development of novel applications not restricted to lab conditions. For example, we demonstrate both refocusing and transient NLOS videos of real-world, complex scenes with large depth.