 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIterating the Transient Light Transport Matrix for Non-Line-of-Sight Imaging
Dec 13, 2024


Active imaging systems sample the Transient Light Transport Matrix (TLTM) for a scene by sequentially illuminating various positions in this scene using a controllable light source, and then measuring the resulting spatiotemporal light transport with time of flight (ToF) sensors. Time-resolved Non-line-of-sight (NLOS) imaging employs an active imaging system that measures part of the TLTM of an intermediary relay surface, and uses the indirect reflections of light encoded within this TLTM to "see around corners". Such imaging systems have applications in diverse areas such as disaster response, remote surveillance, and autonomous navigation. While existing NLOS imaging systems usually measure a subset of the full TLTM, development of customized gated Single Photon Avalanche Diode (SPAD) arrays \cite{riccardo_fast-gated_2022} has made it feasible to probe the full measurement space. In this work, we demonstrate that the full TLTM on the relay surface can be processed with efficient algorithms to computationally focus and detect our illumination in different parts of the hidden scene, turning the relay surface into a second-order active imaging system. These algorithms allow us to iterate on the measured, first-order TLTM, and extract a \textbf{second order TLTM for surfaces in the hidden scene}. We showcase three applications of TLTMs in NLOS imaging: (1) Scene Relighting with novel illumination, (2) Separation of direct and indirect components of light transport in the hidden scene, and (3) Dual Photography. Additionally, we empirically demonstrate that SPAD arrays enable parallel acquisition of photons, effectively mitigating long acquisition times.
Virtual Mirrors: Non-Line-of-Sight Imaging Beyond the Third Bounce
Jul 26, 2023
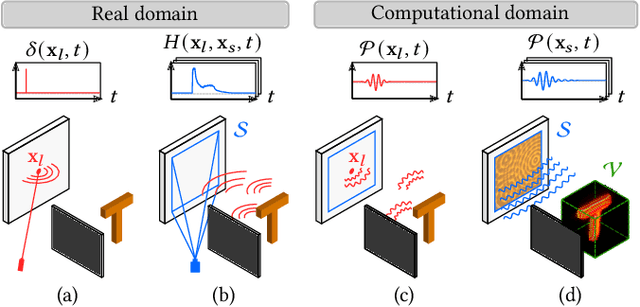


Non-line-of-sight (NLOS) imaging methods are capable of reconstructing complex scenes that are not visible to an observer using indirect illumination. However, they assume only third-bounce illumination, so they are currently limited to single-corner configurations, and present limited visibility when imaging surfaces at certain orientations. To reason about and tackle these limitations, we make the key observation that planar diffuse surfaces behave specularly at wavelengths used in the computational wave-based NLOS imaging domain. We call such surfaces virtual mirrors. We leverage this observation to expand the capabilities of NLOS imaging using illumination beyond the third bounce, addressing two problems: imaging single-corner objects at limited visibility angles, and imaging objects hidden behind two corners. To image objects at limited visibility angles, we first analyze the reflections of the known illuminated point on surfaces of the scene as an estimator of the position and orientation of objects with limited visibility. We then image those limited visibility objects by computationally building secondary apertures at other surfaces that observe the target object from a direct visibility perspective. Beyond single-corner NLOS imaging, we exploit the specular behavior of virtual mirrors to image objects hidden behind a second corner by imaging the space behind such virtual mirrors, where the mirror image of objects hidden around two corners is formed. No specular surfaces were involved in the making of this paper.
Real-time Non-line-of-Sight imaging of dynamic scenes
Oct 24, 2020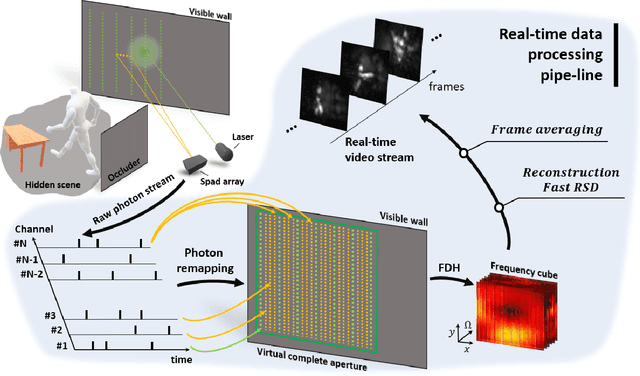
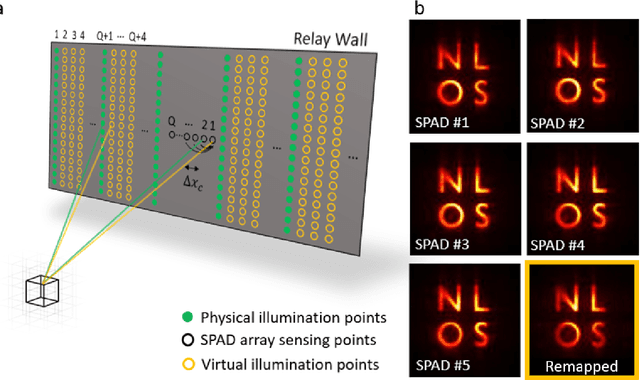
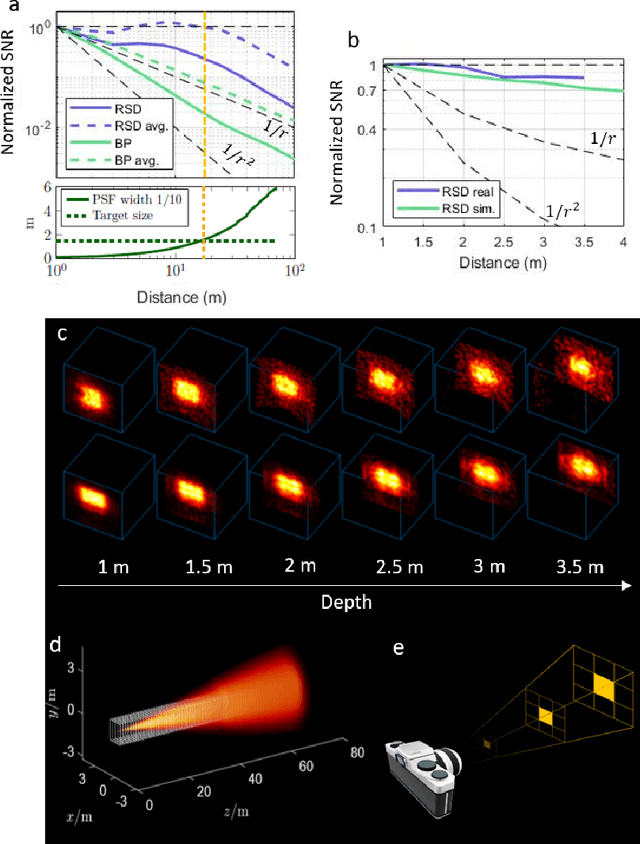
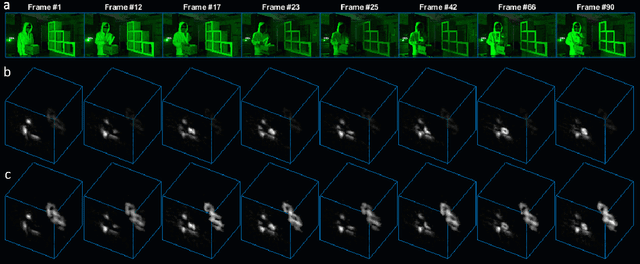
Non-Line-of-Sight (NLOS) imaging aims at recovering the 3D geometry of objects that are hidden from the direct line of sight. In the past, this method has suffered from the weak available multibounce signal limiting scene size, capture speed, and reconstruction quality. While algorithms capable of reconstructing scenes at several frames per second have been demonstrated, real-time NLOS video has only been demonstrated for retro-reflective objects where the NLOS signal strength is enhanced by 4 orders of magnitude or more. Furthermore, it has also been noted that the signal-to-noise ratio of reconstructions in NLOS methods drops quickly with distance and past reconstructions, therefore, have been limited to small scenes with depths of few meters. Actual models of noise and resolution in the scene have been simplistic, ignoring many of the complexities of the problem. We show that SPAD (Single-Photon Avalanche Diode) array detectors with a total of just 28 pixels combined with a specifically extended Phasor Field reconstruction algorithm can reconstruct live real-time videos of non-retro-reflective NLOS scenes. We provide an analysis of the Signal-to-Noise-Ratio (SNR) of our reconstructions and show that for our method it is possible to reconstruct the scene such that SNR, motion blur, angular resolution, and depth resolution are all independent of scene size suggesting that reconstruction of very large scenes may be possible. In the future, the light efficiency for NLOS imaging systems can be improved further by adding more pixels to the sensor array.