 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Calibrating, Fully Differentiable NLOS Inverse Rendering
Sep 26, 2023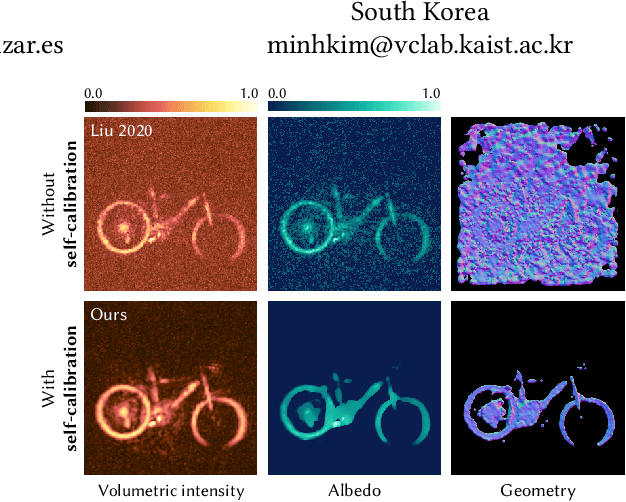
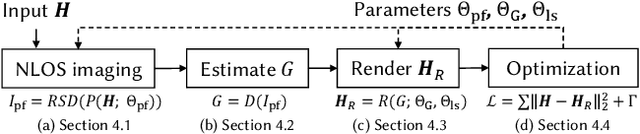
Existing time-resolved non-line-of-sight (NLOS) imaging methods reconstruct hidden scenes by inverting the optical paths of indirect illumination measured at visible relay surfaces. These methods are prone to reconstruction artifacts due to inversion ambiguities and capture noise, which are typically mitigated through the manual selection of filtering functions and parameters. We introduce a fully-differentiable end-to-end NLOS inverse rendering pipeline that self-calibrates the imaging parameters during the reconstruction of hidden scenes, using as input only the measured illumination while working both in the time and frequency domains. Our pipeline extracts a geometric representation of the hidden scene from NLOS volumetric intensities and estimates the time-resolved illumination at the relay wall produced by such geometric information using differentiable transient rendering. We then use gradient descent to optimize imaging parameters by minimizing the error between our simulated time-resolved illumination and the measured illumination. Our end-to-end differentiable pipeline couples diffraction-based volumetric NLOS reconstruction with path-space light transport and a simple ray marching technique to extract detailed, dense sets of surface points and normals of hidden scenes. We demonstrate the robustness of our method to consistently reconstruct geometry and albedo, even under significant noise levels.
Structure-Aware Parametric Representations for Time-Resolved Light Transport
Aug 30, 2023



Time-resolved illumination provides rich spatio-temporal information for applications such as accurate depth sensing or hidden geometry reconstruction, becoming a useful asset for prototyping and as input for data-driven approaches. However, time-resolved illumination measurements are high-dimensional and have a low signal-to-noise ratio, hampering their applicability in real scenarios. We propose a novel method to compactly represent time-resolved illumination using mixtures of exponentially-modified Gaussians that are robust to noise and preserve structural information. Our method yields representations two orders of magnitude smaller than discretized data, providing consistent results in applications such as hidden scene reconstruction and depth estimation, and quantitative improvements over previous approaches.
Virtual Mirrors: Non-Line-of-Sight Imaging Beyond the Third Bounce
Jul 26, 2023


Non-line-of-sight (NLOS) imaging methods are capable of reconstructing complex scenes that are not visible to an observer using indirect illumination. However, they assume only third-bounce illumination, so they are currently limited to single-corner configurations, and present limited visibility when imaging surfaces at certain orientations. To reason about and tackle these limitations, we make the key observation that planar diffuse surfaces behave specularly at wavelengths used in the computational wave-based NLOS imaging domain. We call such surfaces virtual mirrors. We leverage this observation to expand the capabilities of NLOS imaging using illumination beyond the third bounce, addressing two problems: imaging single-corner objects at limited visibility angles, and imaging objects hidden behind two corners. To image objects at limited visibility angles, we first analyze the reflections of the known illuminated point on surfaces of the scene as an estimator of the position and orientation of objects with limited visibility. We then image those limited visibility objects by computationally building secondary apertures at other surfaces that observe the target object from a direct visibility perspective. Beyond single-corner NLOS imaging, we exploit the specular behavior of virtual mirrors to image objects hidden behind a second corner by imaging the space behind such virtual mirrors, where the mirror image of objects hidden around two corners is formed. No specular surfaces were involved in the making of this paper.
Virtual light transport matrices for non-line-of-sight imaging
Mar 23, 2021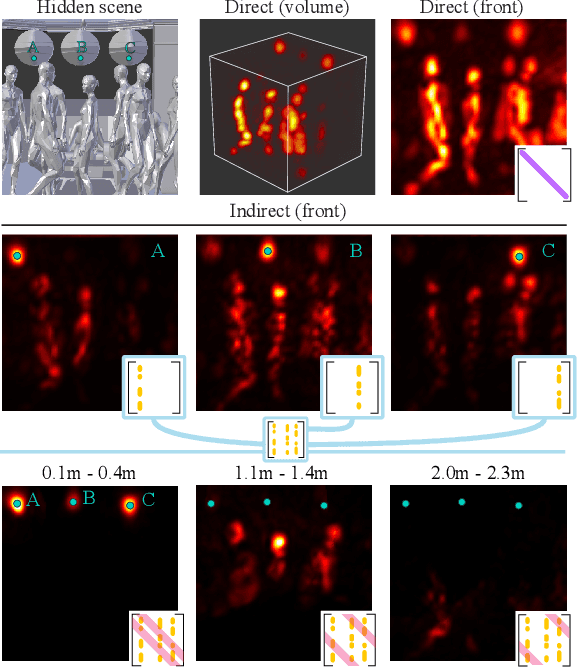
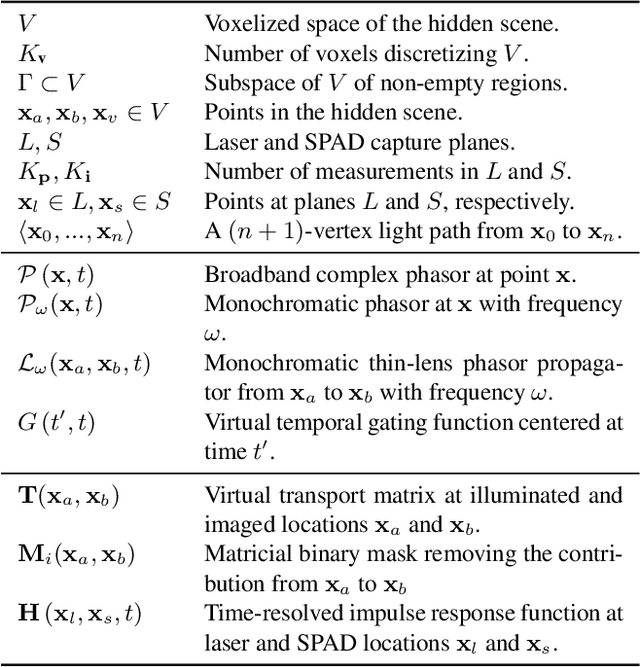
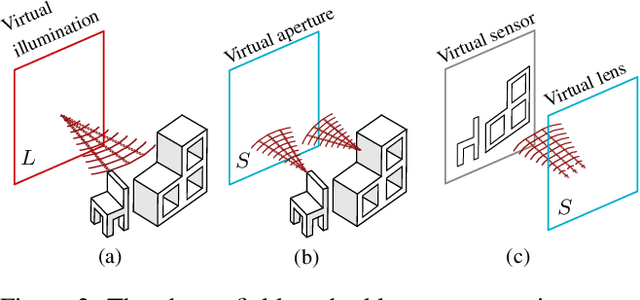
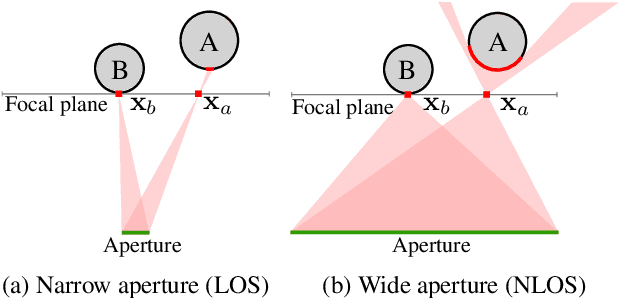
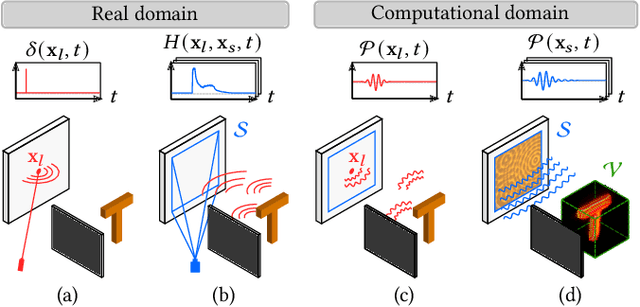
The light transport matrix (LTM) is an instrumental tool in line-of-sight (LOS) imaging, describing how light interacts with the scene and enabling applications such as relighting or separation of illumination components. We introduce a framework to estimate the LTM of non-line-of-sight (NLOS) scenarios, coupling recent virtual forward light propagation models for NLOS imaging with the LOS light transport equation. We design computational projector-camera setups, and use these virtual imaging systems to estimate the transport matrix of hidden scenes. We introduce the specific illumination functions to compute the different elements of the matrix, overcoming the challenging wide-aperture conditions of NLOS setups. Our NLOS light transport matrix allows us to (re)illuminate specific locations of a hidden scene, and separate direct, first-order indirect, and higher-order indirect illumination of complex cluttered hidden scenes, similar to existing LOS techniques.
Recent Advances in Transient Imaging: A Computer Graphics and Vision Perspective
Nov 03, 2016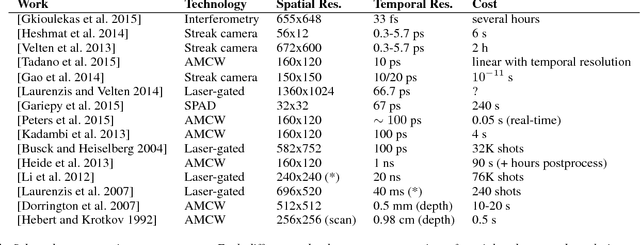
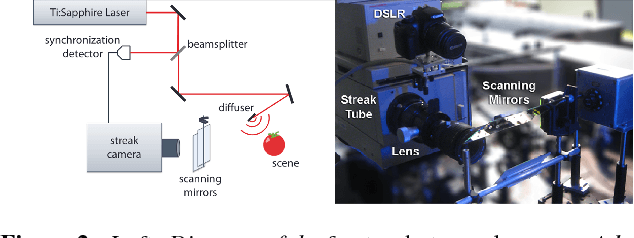
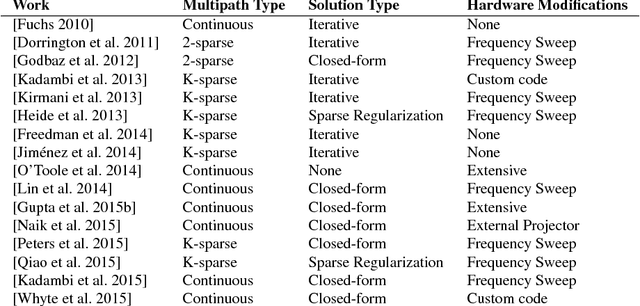
Transient imaging has recently made a huge impact in the computer graphics and computer vision fields. By capturing, reconstructing, or simulating light transport at extreme temporal resolutions, researchers have proposed novel techniques to show movies of light in motion, see around corners, detect objects in highly-scattering media, or infer material properties from a distance, to name a few. The key idea is to leverage the wealth of information in the temporal domain at the pico or nanosecond resolution, information usually lost during the capture-time temporal integration. This paper presents recent advances in this field of transient imaging from a graphics and vision perspective, including capture techniques, analysis, applications and simulation.