 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBenchmarking Burst Super-Resolution for Polarization Images: Noise Dataset and Analysis
Mar 24, 2025



Snapshot polarization imaging calculates polarization states from linearly polarized subimages. To achieve this, a polarization camera employs a double Bayer-patterned sensor to capture both color and polarization. It demonstrates low light efficiency and low spatial resolution, resulting in increased noise and compromised polarization measurements. Although burst super-resolution effectively reduces noise and enhances spatial resolution, applying it to polarization imaging poses challenges due to the lack of tailored datasets and reliable ground truth noise statistics. To address these issues, we introduce PolarNS and PolarBurstSR, two innovative datasets developed specifically for polarization imaging. PolarNS provides characterization of polarization noise statistics, facilitating thorough analysis, while PolarBurstSR functions as a benchmark for burst super-resolution in polarization images. These datasets, collected under various real-world conditions, enable comprehensive evaluation. Additionally, we present a model for analyzing polarization noise to quantify noise propagation, tested on a large dataset captured in a darkroom environment. As part of our application, we compare the latest burst super-resolution models, highlighting the advantages of training tailored to polarization compared to RGB-based methods. This work establishes a benchmark for polarization burst super-resolution and offers critical insights into noise propagation, thereby enhancing polarization image reconstruction.
Self-Calibrating, Fully Differentiable NLOS Inverse Rendering
Sep 26, 2023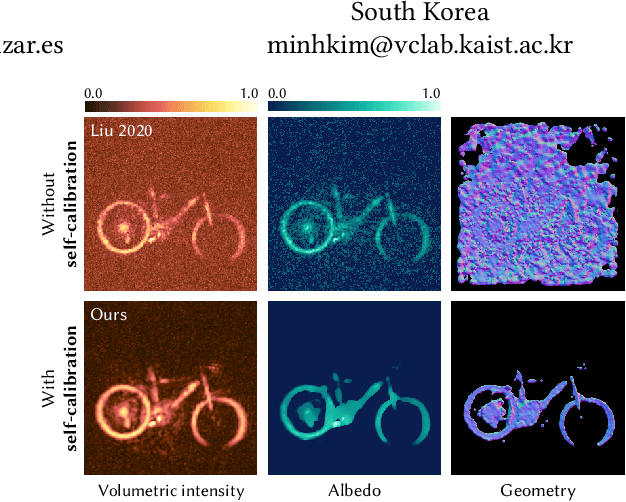
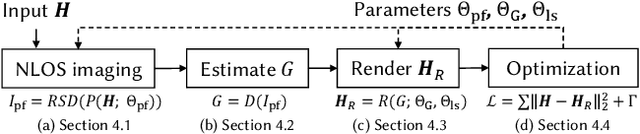
Existing time-resolved non-line-of-sight (NLOS) imaging methods reconstruct hidden scenes by inverting the optical paths of indirect illumination measured at visible relay surfaces. These methods are prone to reconstruction artifacts due to inversion ambiguities and capture noise, which are typically mitigated through the manual selection of filtering functions and parameters. We introduce a fully-differentiable end-to-end NLOS inverse rendering pipeline that self-calibrates the imaging parameters during the reconstruction of hidden scenes, using as input only the measured illumination while working both in the time and frequency domains. Our pipeline extracts a geometric representation of the hidden scene from NLOS volumetric intensities and estimates the time-resolved illumination at the relay wall produced by such geometric information using differentiable transient rendering. We then use gradient descent to optimize imaging parameters by minimizing the error between our simulated time-resolved illumination and the measured illumination. Our end-to-end differentiable pipeline couples diffraction-based volumetric NLOS reconstruction with path-space light transport and a simple ray marching technique to extract detailed, dense sets of surface points and normals of hidden scenes. We demonstrate the robustness of our method to consistently reconstruct geometry and albedo, even under significant noise levels.