 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniLocalRF: Omnidirectional Local Radiance Fields from Dynamic Videos
Mar 31, 2024
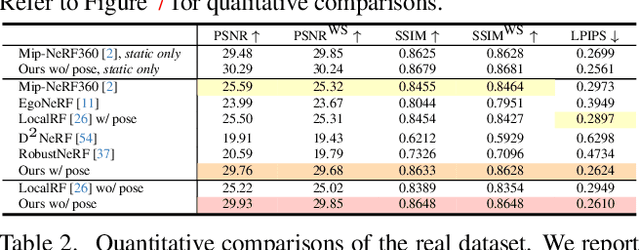


Omnidirectional cameras are extensively used in various applications to provide a wide field of vision. However, they face a challenge in synthesizing novel views due to the inevitable presence of dynamic objects, including the photographer, in their wide field of view. In this paper, we introduce a new approach called Omnidirectional Local Radiance Fields (OmniLocalRF) that can render static-only scene views, removing and inpainting dynamic objects simultaneously. Our approach combines the principles of local radiance fields with the bidirectional optimization of omnidirectional rays. Our input is an omnidirectional video, and we evaluate the mutual observations of the entire angle between the previous and current frames. To reduce ghosting artifacts of dynamic objects and inpaint occlusions, we devise a multi-resolution motion mask prediction module. Unlike existing methods that primarily separate dynamic components through the temporal domain, our method uses multi-resolution neural feature planes for precise segmentation, which is more suitable for long 360-degree videos. Our experiments validate that OmniLocalRF outperforms existing methods in both qualitative and quantitative metrics, especially in scenarios with complex real-world scenes. In particular, our approach eliminates the need for manual interaction, such as drawing motion masks by hand and additional pose estimation, making it a highly effective and efficient solution.
Self-Calibrating, Fully Differentiable NLOS Inverse Rendering
Sep 26, 2023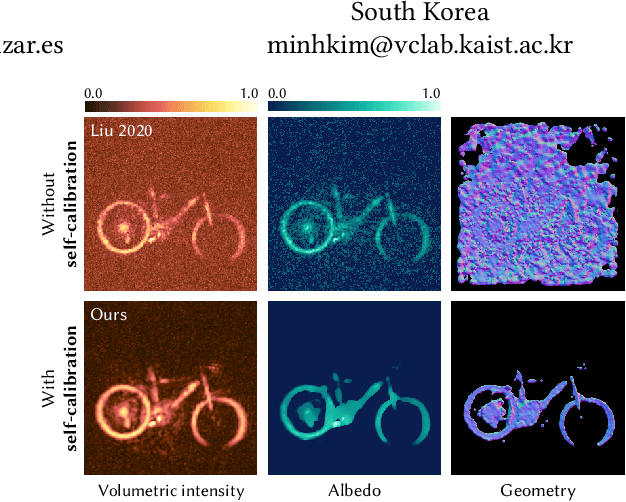
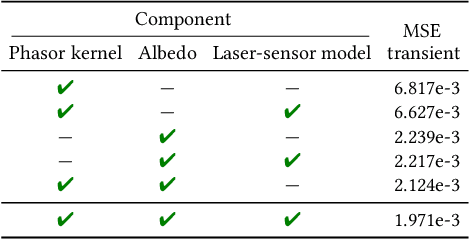
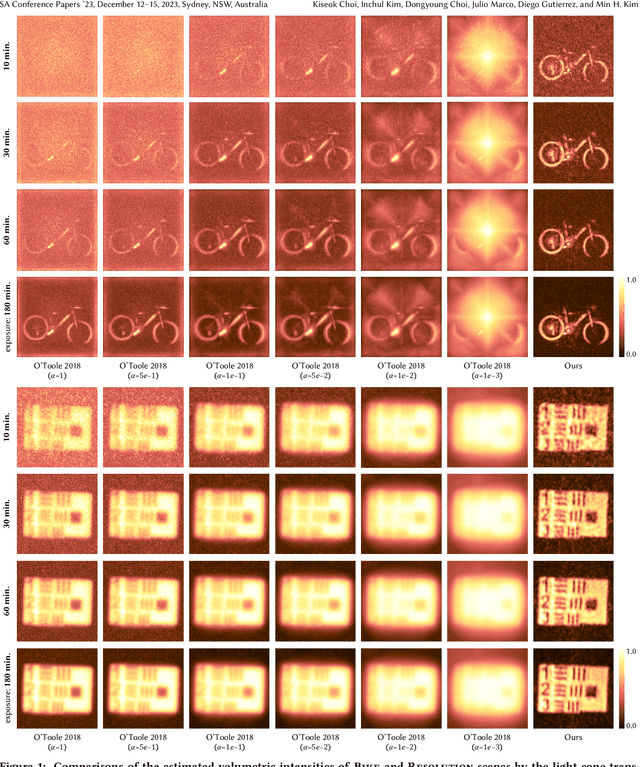
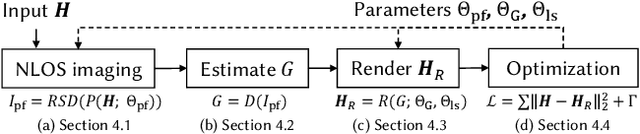
Existing time-resolved non-line-of-sight (NLOS) imaging methods reconstruct hidden scenes by inverting the optical paths of indirect illumination measured at visible relay surfaces. These methods are prone to reconstruction artifacts due to inversion ambiguities and capture noise, which are typically mitigated through the manual selection of filtering functions and parameters. We introduce a fully-differentiable end-to-end NLOS inverse rendering pipeline that self-calibrates the imaging parameters during the reconstruction of hidden scenes, using as input only the measured illumination while working both in the time and frequency domains. Our pipeline extracts a geometric representation of the hidden scene from NLOS volumetric intensities and estimates the time-resolved illumination at the relay wall produced by such geometric information using differentiable transient rendering. We then use gradient descent to optimize imaging parameters by minimizing the error between our simulated time-resolved illumination and the measured illumination. Our end-to-end differentiable pipeline couples diffraction-based volumetric NLOS reconstruction with path-space light transport and a simple ray marching technique to extract detailed, dense sets of surface points and normals of hidden scenes. We demonstrate the robustness of our method to consistently reconstruct geometry and albedo, even under significant noise levels.