 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmniSDF: Scene Reconstruction using Omnidirectional Signed Distance Functions and Adaptive Binoctrees
Mar 31, 2024We present a method to reconstruct indoor and outdoor static scene geometry and appearance from an omnidirectional video moving in a small circular sweep. This setting is challenging because of the small baseline and large depth ranges, making it difficult to find ray crossings. To better constrain the optimization, we estimate geometry as a signed distance field within a spherical binoctree data structure and use a complementary efficient tree traversal strategy based on a breadth-first search for sampling. Unlike regular grids or trees, the shape of this structure well-matches the camera setting, creating a better memory-quality trade-off. From an initial depth estimate, the binoctree is adaptively subdivided throughout the optimization; previous methods use a fixed depth that leaves the scene undersampled. In comparison with three neural optimization methods and two non-neural methods, ours shows decreased geometry error on average, especially in a detailed scene, while significantly reducing the required number of voxels to represent such details.
OmniLocalRF: Omnidirectional Local Radiance Fields from Dynamic Videos
Mar 31, 2024


Omnidirectional cameras are extensively used in various applications to provide a wide field of vision. However, they face a challenge in synthesizing novel views due to the inevitable presence of dynamic objects, including the photographer, in their wide field of view. In this paper, we introduce a new approach called Omnidirectional Local Radiance Fields (OmniLocalRF) that can render static-only scene views, removing and inpainting dynamic objects simultaneously. Our approach combines the principles of local radiance fields with the bidirectional optimization of omnidirectional rays. Our input is an omnidirectional video, and we evaluate the mutual observations of the entire angle between the previous and current frames. To reduce ghosting artifacts of dynamic objects and inpaint occlusions, we devise a multi-resolution motion mask prediction module. Unlike existing methods that primarily separate dynamic components through the temporal domain, our method uses multi-resolution neural feature planes for precise segmentation, which is more suitable for long 360-degree videos. Our experiments validate that OmniLocalRF outperforms existing methods in both qualitative and quantitative metrics, especially in scenarios with complex real-world scenes. In particular, our approach eliminates the need for manual interaction, such as drawing motion masks by hand and additional pose estimation, making it a highly effective and efficient solution.
DeepFormableTag: End-to-end Generation and Recognition of Deformable Fiducial Markers
Jun 16, 2022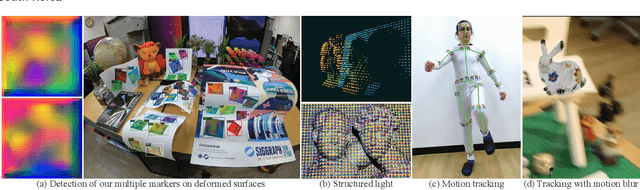
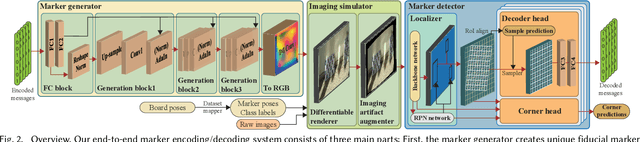
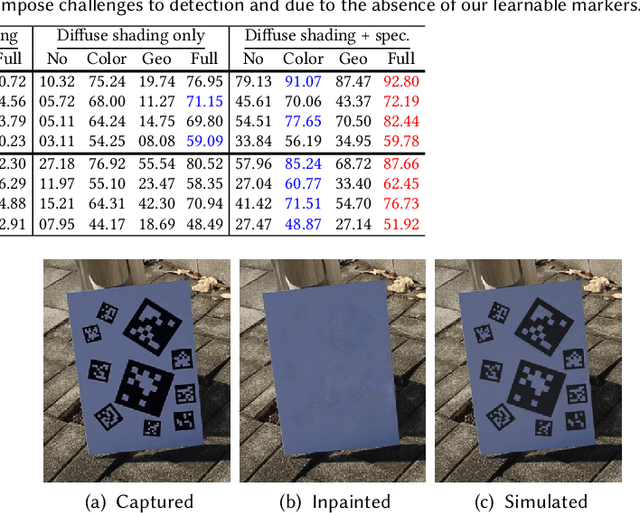
Fiducial markers have been broadly used to identify objects or embed messages that can be detected by a camera. Primarily, existing detection methods assume that markers are printed on ideally planar surfaces. Markers often fail to be recognized due to various imaging artifacts of optical/perspective distortion and motion blur. To overcome these limitations, we propose a novel deformable fiducial marker system that consists of three main parts: First, a fiducial marker generator creates a set of free-form color patterns to encode significantly large-scale information in unique visual codes. Second, a differentiable image simulator creates a training dataset of photorealistic scene images with the deformed markers, being rendered during optimization in a differentiable manner. The rendered images include realistic shading with specular reflection, optical distortion, defocus and motion blur, color alteration, imaging noise, and shape deformation of markers. Lastly, a trained marker detector seeks the regions of interest and recognizes multiple marker patterns simultaneously via inverse deformation transformation. The deformable marker creator and detector networks are jointly optimized via the differentiable photorealistic renderer in an end-to-end manner, allowing us to robustly recognize a wide range of deformable markers with high accuracy. Our deformable marker system is capable of decoding 36-bit messages successfully at ~29 fps with severe shape deformation. Results validate that our system significantly outperforms the traditional and data-driven marker methods. Our learning-based marker system opens up new interesting applications of fiducial markers, including cost-effective motion capture of the human body, active 3D scanning using our fiducial markers' array as structured light patterns, and robust augmented reality rendering of virtual objects on dynamic surfaces.