 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFactorized Inverse Path Tracing for Efficient and Accurate Material-Lighting Estimation
Apr 12, 2023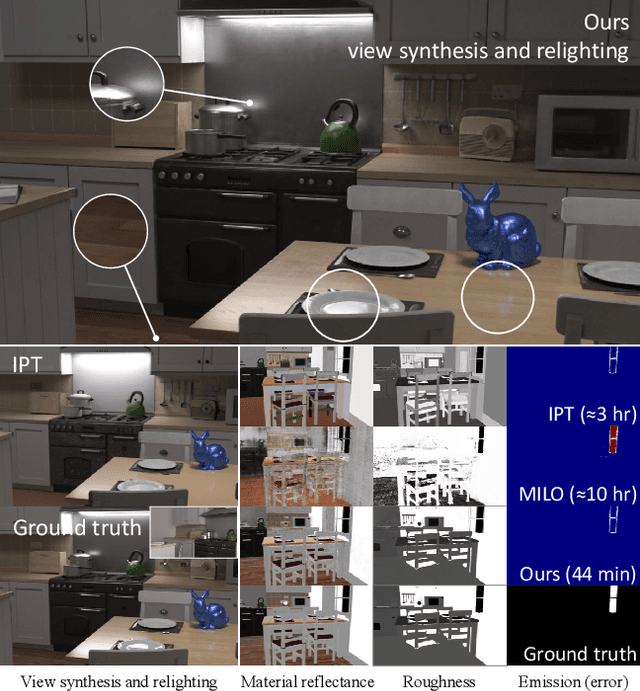

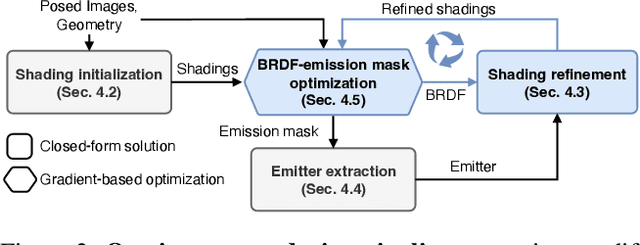

Inverse path tracing has recently been applied to joint material and lighting estimation, given geometry and multi-view HDR observations of an indoor scene. However, it has two major limitations: path tracing is expensive to compute, and ambiguities exist between reflection and emission. We propose a novel Factorized Inverse Path Tracing (FIPT) method which utilizes a factored light transport formulation and finds emitters driven by rendering errors. Our algorithm enables accurate material and lighting optimization faster than previous work, and is more effective at resolving ambiguities. The exhaustive experiments on synthetic scenes show that our method (1) outperforms state-of-the-art indoor inverse rendering and relighting methods particularly in the presence of complex illumination effects; (2) speeds up inverse path tracing optimization to less than an hour. We further demonstrate robustness to noisy inputs through material and lighting estimates that allow plausible relighting in a real scene. The source code is available at: https://github.com/lwwu2/fipt
DeepFormableTag: End-to-end Generation and Recognition of Deformable Fiducial Markers
Jun 16, 2022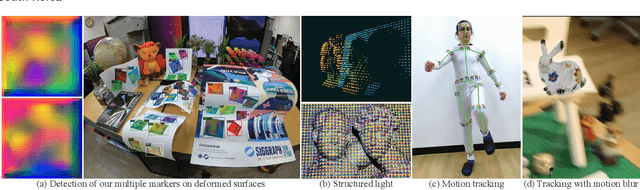
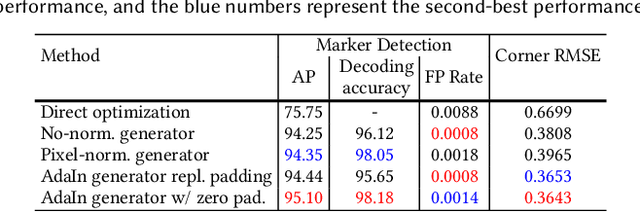
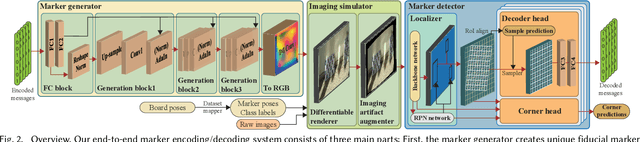
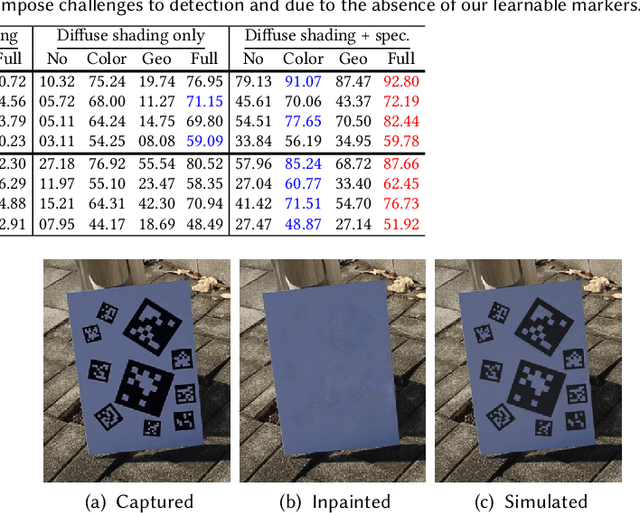
Fiducial markers have been broadly used to identify objects or embed messages that can be detected by a camera. Primarily, existing detection methods assume that markers are printed on ideally planar surfaces. Markers often fail to be recognized due to various imaging artifacts of optical/perspective distortion and motion blur. To overcome these limitations, we propose a novel deformable fiducial marker system that consists of three main parts: First, a fiducial marker generator creates a set of free-form color patterns to encode significantly large-scale information in unique visual codes. Second, a differentiable image simulator creates a training dataset of photorealistic scene images with the deformed markers, being rendered during optimization in a differentiable manner. The rendered images include realistic shading with specular reflection, optical distortion, defocus and motion blur, color alteration, imaging noise, and shape deformation of markers. Lastly, a trained marker detector seeks the regions of interest and recognizes multiple marker patterns simultaneously via inverse deformation transformation. The deformable marker creator and detector networks are jointly optimized via the differentiable photorealistic renderer in an end-to-end manner, allowing us to robustly recognize a wide range of deformable markers with high accuracy. Our deformable marker system is capable of decoding 36-bit messages successfully at ~29 fps with severe shape deformation. Results validate that our system significantly outperforms the traditional and data-driven marker methods. Our learning-based marker system opens up new interesting applications of fiducial markers, including cost-effective motion capture of the human body, active 3D scanning using our fiducial markers' array as structured light patterns, and robust augmented reality rendering of virtual objects on dynamic surfaces.