 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics to the Rescue: Deep Non-line-of-sight Reconstruction for High-speed Imaging
May 03, 2022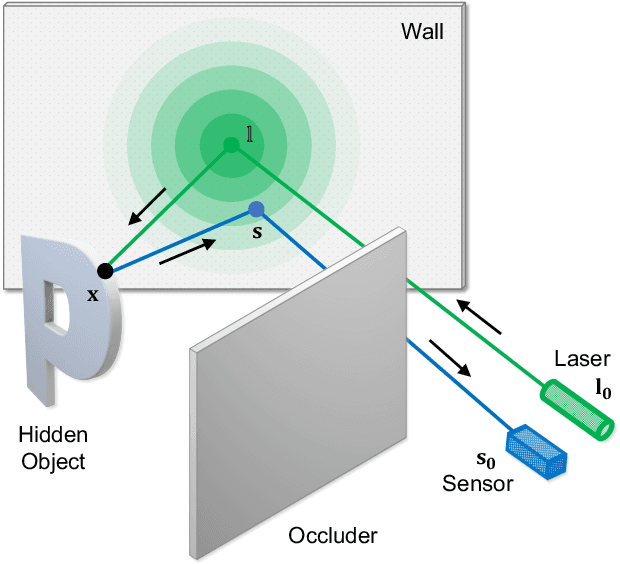
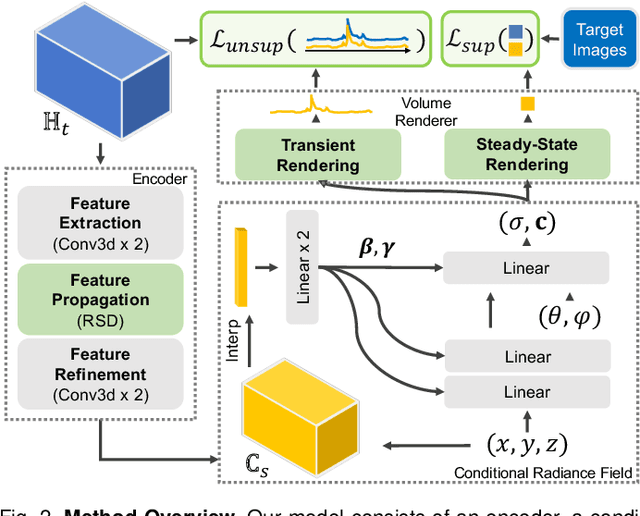
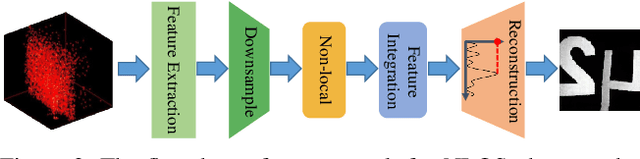
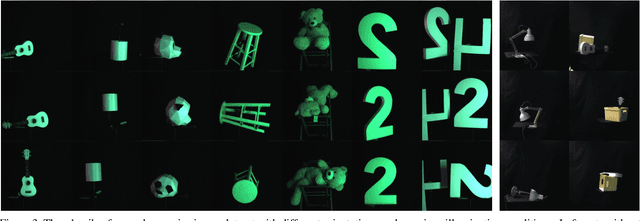
Computational approach to imaging around the corner, or non-line-of-sight (NLOS) imaging, is becoming a reality thanks to major advances in imaging hardware and reconstruction algorithms. A recent development towards practical NLOS imaging, Nam et al. demonstrated a high-speed non-confocal imaging system that operates at 5Hz, 100x faster than the prior art. This enormous gain in acquisition rate, however, necessitates numerous approximations in light transport, breaking many existing NLOS reconstruction methods that assume an idealized image formation model. To bridge the gap, we present a novel deep model that incorporates the complementary physics priors of wave propagation and volume rendering into a neural network for high-quality and robust NLOS reconstruction. This orchestrated design regularizes the solution space by relaxing the image formation model, resulting in a deep model that generalizes well on real captures despite being exclusively trained on synthetic data. Further, we devise a unified learning framework that enables our model to be flexibly trained using diverse supervision signals, including target intensity images or even raw NLOS transient measurements. Once trained, our model renders both intensity and depth images at inference time in a single forward pass, capable of processing more than 5 captures per second on a high-end GPU. Through extensive qualitative and quantitative experiments, we show that our method outperforms prior physics and learning based approaches on both synthetic and real measurements. We anticipate that our method along with the fast capturing system will accelerate future development of NLOS imaging for real world applications that require high-speed imaging.
Degradation-agnostic Correspondence from Resolution-asymmetric Stereo
Apr 04, 2022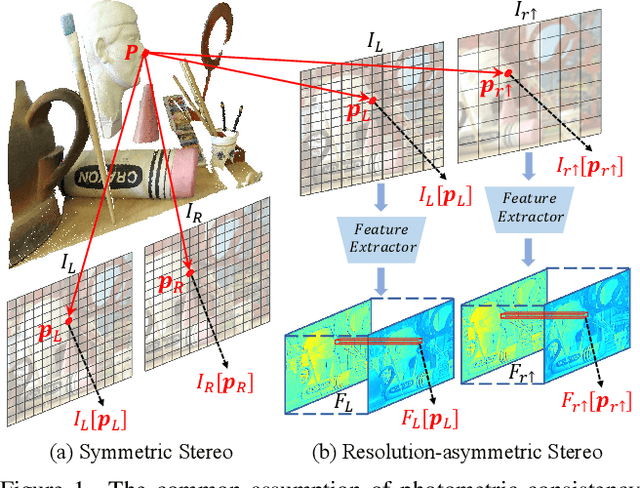

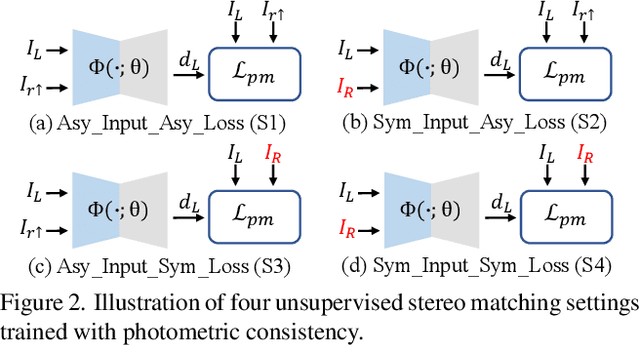
In this paper, we study the problem of stereo matching from a pair of images with different resolutions, e.g., those acquired with a tele-wide camera system. Due to the difficulty of obtaining ground-truth disparity labels in diverse real-world systems, we start from an unsupervised learning perspective. However, resolution asymmetry caused by unknown degradations between two views hinders the effectiveness of the generally assumed photometric consistency. To overcome this challenge, we propose to impose the consistency between two views in a feature space instead of the image space, named feature-metric consistency. Interestingly, we find that, although a stereo matching network trained with the photometric loss is not optimal, its feature extractor can produce degradation-agnostic and matching-specific features. These features can then be utilized to formulate a feature-metric loss to avoid the photometric inconsistency. Moreover, we introduce a self-boosting strategy to optimize the feature extractor progressively, which further strengthens the feature-metric consistency. Experiments on both simulated datasets with various degradations and a self-collected real-world dataset validate the superior performance of the proposed method over existing solutions.
Towards Non-Line-of-Sight Photography
Sep 16, 2021

Non-line-of-sight (NLOS) imaging is based on capturing the multi-bounce indirect reflections from the hidden objects. Active NLOS imaging systems rely on the capture of the time of flight of light through the scene, and have shown great promise for the accurate and robust reconstruction of hidden scenes without the need for specialized scene setups and prior assumptions. Despite that existing methods can reconstruct 3D geometries of the hidden scene with excellent depth resolution, accurately recovering object textures and appearance with high lateral resolution remains an challenging problem. In this work, we propose a new problem formulation, called NLOS photography, to specifically address this deficiency. Rather than performing an intermediate estimate of the 3D scene geometry, our method follows a data-driven approach and directly reconstructs 2D images of a NLOS scene that closely resemble the pictures taken with a conventional camera from the location of the relay wall. This formulation largely simplifies the challenging reconstruction problem by bypassing the explicit modeling of 3D geometry, and enables the learning of a deep model with a relatively small training dataset. The results are NLOS reconstructions of unprecedented lateral resolution and image quality.