 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Words to Wheels: Automated Style-Customized Policy Generation for Autonomous Driving
Sep 18, 2024



Autonomous driving technology has witnessed rapid advancements, with foundation models improving interactivity and user experiences. However, current autonomous vehicles (AVs) face significant limitations in delivering command-based driving styles. Most existing methods either rely on predefined driving styles that require expert input or use data-driven techniques like Inverse Reinforcement Learning to extract styles from driving data. These approaches, though effective in some cases, face challenges: difficulty obtaining specific driving data for style matching (e.g., in Robotaxis), inability to align driving style metrics with user preferences, and limitations to pre-existing styles, restricting customization and generalization to new commands. This paper introduces Words2Wheels, a framework that automatically generates customized driving policies based on natural language user commands. Words2Wheels employs a Style-Customized Reward Function to generate a Style-Customized Driving Policy without relying on prior driving data. By leveraging large language models and a Driving Style Database, the framework efficiently retrieves, adapts, and generalizes driving styles. A Statistical Evaluation module ensures alignment with user preferences. Experimental results demonstrate that Words2Wheels outperforms existing methods in accuracy, generalization, and adaptability, offering a novel solution for customized AV driving behavior. Code and demo available at https://yokhon.github.io/Words2Wheels/.
EcoFollower: An Environment-Friendly Car Following Model Considering Fuel Consumption
Jul 22, 2024



To alleviate energy shortages and environmental impacts caused by transportation, this study introduces EcoFollower, a novel eco-car-following model developed using reinforcement learning (RL) to optimize fuel consumption in car-following scenarios. Employing the NGSIM datasets, the performance of EcoFollower was assessed in comparison with the well-established Intelligent Driver Model (IDM). The findings demonstrate that EcoFollower excels in simulating realistic driving behaviors, maintaining smooth vehicle operations, and closely matching the ground truth metrics of time-to-collision (TTC), headway, and comfort. Notably, the model achieved a significant reduction in fuel consumption, lowering it by 10.42\% compared to actual driving scenarios. These results underscore the capability of RL-based models like EcoFollower to enhance autonomous vehicle algorithms, promoting safer and more energy-efficient driving strategies.
Continual Learning for Adaptable Car-Following in Dynamic Traffic Environments
Jul 17, 2024



The continual evolution of autonomous driving technology requires car-following models that can adapt to diverse and dynamic traffic environments. Traditional learning-based models often suffer from performance degradation when encountering unseen traffic patterns due to a lack of continual learning capabilities. This paper proposes a novel car-following model based on continual learning that addresses this limitation. Our framework incorporates Elastic Weight Consolidation (EWC) and Memory Aware Synapses (MAS) techniques to mitigate catastrophic forgetting and enable the model to learn incrementally from new traffic data streams. We evaluate the performance of the proposed model on the Waymo and Lyft datasets which encompass various traffic scenarios. The results demonstrate that the continual learning techniques significantly outperform the baseline model, achieving 0\% collision rates across all traffic conditions. This research contributes to the advancement of autonomous driving technology by fostering the development of more robust and adaptable car-following models.
GenFollower: Enhancing Car-Following Prediction with Large Language Models
Jul 08, 2024



Accurate modeling of car-following behaviors is essential for various applications in traffic management and autonomous driving systems. However, current approaches often suffer from limitations like high sensitivity to data quality and lack of interpretability. In this study, we propose GenFollower, a novel zero-shot prompting approach that leverages large language models (LLMs) to address these challenges. We reframe car-following behavior as a language modeling problem and integrate heterogeneous inputs into structured prompts for LLMs. This approach achieves improved prediction performance and interpretability compared to traditional baseline models. Experiments on the Waymo Open datasets demonstrate GenFollower's superior performance and ability to provide interpretable insights into factors influencing car-following behavior. This work contributes to advancing the understanding and prediction of car-following behaviors, paving the way for enhanced traffic management and autonomous driving systems.
MetaFollower: Adaptable Personalized Autonomous Car Following
Jun 23, 2024



Car-following (CF) modeling, a fundamental component in microscopic traffic simulation, has attracted increasing interest of researchers in the past decades. In this study, we propose an adaptable personalized car-following framework -MetaFollower, by leveraging the power of meta-learning. Specifically, we first utilize Model-Agnostic Meta-Learning (MAML) to extract common driving knowledge from various CF events. Afterward, the pre-trained model can be fine-tuned on new drivers with only a few CF trajectories to achieve personalized CF adaptation. We additionally combine Long Short-Term Memory (LSTM) and Intelligent Driver Model (IDM) to reflect temporal heterogeneity with high interpretability. Unlike conventional adaptive cruise control (ACC) systems that rely on predefined settings and constant parameters without considering heterogeneous driving characteristics, MetaFollower can accurately capture and simulate the intricate dynamics of car-following behavior while considering the unique driving styles of individual drivers. We demonstrate the versatility and adaptability of MetaFollower by showcasing its ability to adapt to new drivers with limited training data quickly. To evaluate the performance of MetaFollower, we conduct rigorous experiments comparing it with both data-driven and physics-based models. The results reveal that our proposed framework outperforms baseline models in predicting car-following behavior with higher accuracy and safety. To the best of our knowledge, this is the first car-following model aiming to achieve fast adaptation by considering both driver and temporal heterogeneity based on meta-learning.
CAV-AHDV-CAV: Mitigating Traffic Oscillations for CAVs through a Novel Car-Following Structure and Reinforcement Learning
Jun 23, 2024
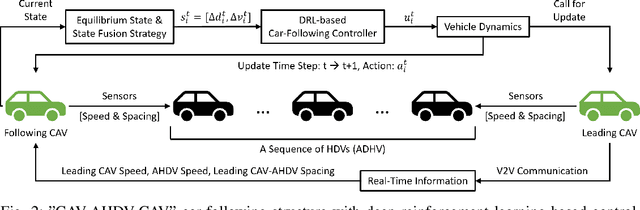


Connected and Automated Vehicles (CAVs) offer a promising solution to the challenges of mixed traffic with both CAVs and Human-Driven Vehicles (HDVs). A significant hurdle in such scenarios is traffic oscillation, or the "stop-and-go" pattern, during car-following situations. While HDVs rely on limited information, CAVs can leverage data from other CAVs for better decision-making. This allows CAVs to anticipate and mitigate the spread of deceleration waves that worsen traffic flow. We propose a novel "CAV-AHDV-CAV" car-following framework that treats the sequence of HDVs between two CAVs as a single entity, eliminating noise from individual driver behaviors. This deep reinforcement learning approach analyzes vehicle equilibrium states and employs a state fusion strategy. Trained and tested on diverse datasets (HighD, NGSIM, SPMD, Waymo, Lyft) encompassing over 70,000 car-following instances, our model outperforms baselines in collision avoidance, maintaining equilibrium with both preceding and leading vehicles and achieving the lowest standard deviation of time headway. These results demonstrate the effectiveness of our approach in developing robust CAV control strategies for mixed traffic. Our model has the potential to mitigate traffic oscillation, improve traffic flow efficiency, and enhance overall safety.
EditFollower: Tunable Car Following Models for Customizable Adaptive Cruise Control Systems
Jun 23, 2024



In the realm of driving technologies, fully autonomous vehicles have not been widely adopted yet, making advanced driver assistance systems (ADAS) crucial for enhancing driving experiences. Adaptive Cruise Control (ACC) emerges as a pivotal component of ADAS. However, current ACC systems often employ fixed settings, failing to intuitively capture drivers' social preferences and leading to potential function disengagement. To overcome these limitations, we propose the Editable Behavior Generation (EBG) model, a data-driven car-following model that allows for adjusting driving discourtesy levels. The framework integrates diverse courtesy calculation methods into long short-term memory (LSTM) and Transformer architectures, offering a comprehensive approach to capture nuanced driving dynamics. By integrating various discourtesy values during the training process, our model generates realistic agent trajectories with different levels of courtesy in car-following behavior. Experimental results on the HighD and Waymo datasets showcase a reduction in Mean Squared Error (MSE) of spacing and MSE of speed compared to baselines, establishing style controllability. To the best of our knowledge, this work represents the first data-driven car-following model capable of dynamically adjusting discourtesy levels. Our model provides valuable insights for the development of ACC systems that take into account drivers' social preferences.
Generating and Evolving Reward Functions for Highway Driving with Large Language Models
Jun 15, 2024Reinforcement Learning (RL) plays a crucial role in advancing autonomous driving technologies by maximizing reward functions to achieve the optimal policy. However, crafting these reward functions has been a complex, manual process in many practices. To reduce this complexity, we introduce a novel framework that integrates Large Language Models (LLMs) with RL to improve reward function design in autonomous driving. This framework utilizes the coding capabilities of LLMs, proven in other areas, to generate and evolve reward functions for highway scenarios. The framework starts with instructing LLMs to create an initial reward function code based on the driving environment and task descriptions. This code is then refined through iterative cycles involving RL training and LLMs' reflection, which benefits from their ability to review and improve the output. We have also developed a specific prompt template to improve LLMs' understanding of complex driving simulations, ensuring the generation of effective and error-free code. Our experiments in a highway driving simulator across three traffic configurations show that our method surpasses expert handcrafted reward functions, achieving a 22% higher average success rate. This not only indicates safer driving but also suggests significant gains in development productivity.
LC-LLM: Explainable Lane-Change Intention and Trajectory Predictions with Large Language Models
Mar 27, 2024



To ensure safe driving in dynamic environments, autonomous vehicles should possess the capability to accurately predict the lane change intentions of surrounding vehicles in advance and forecast their future trajectories. Existing motion prediction approaches have ample room for improvement, particularly in terms of long-term prediction accuracy and interpretability. In this paper, we address these challenges by proposing LC-LLM, an explainable lane change prediction model that leverages the strong reasoning capabilities and self-explanation abilities of Large Language Models (LLMs). Essentially, we reformulate the lane change prediction task as a language modeling problem, processing heterogeneous driving scenario information in natural language as prompts for input into the LLM and employing a supervised fine-tuning technique to tailor the LLM specifically for our lane change prediction task. This allows us to utilize the LLM's powerful common sense reasoning abilities to understand complex interactive information, thereby improving the accuracy of long-term predictions. Furthermore, we incorporate explanatory requirements into the prompts in the inference stage. Therefore, our LC-LLM model not only can predict lane change intentions and trajectories but also provides explanations for its predictions, enhancing the interpretability. Extensive experiments on the large-scale highD dataset demonstrate the superior performance and interpretability of our LC-LLM in lane change prediction task. To the best of our knowledge, this is the first attempt to utilize LLMs for predicting lane change behavior. Our study shows that LLMs can encode comprehensive interaction information for driving behavior understanding.
BEVGPT: Generative Pre-trained Large Model for Autonomous Driving Prediction, Decision-Making, and Planning
Oct 16, 2023



Prediction, decision-making, and motion planning are essential for autonomous driving. In most contemporary works, they are considered as individual modules or combined into a multi-task learning paradigm with a shared backbone but separate task heads. However, we argue that they should be integrated into a comprehensive framework. Although several recent approaches follow this scheme, they suffer from complicated input representations and redundant framework designs. More importantly, they can not make long-term predictions about future driving scenarios. To address these issues, we rethink the necessity of each module in an autonomous driving task and incorporate only the required modules into a minimalist autonomous driving framework. We propose BEVGPT, a generative pre-trained large model that integrates driving scenario prediction, decision-making, and motion planning. The model takes the bird's-eye-view (BEV) images as the only input source and makes driving decisions based on surrounding traffic scenarios. To ensure driving trajectory feasibility and smoothness, we develop an optimization-based motion planning method. We instantiate BEVGPT on Lyft Level 5 Dataset and use Woven Planet L5Kit for realistic driving simulation. The effectiveness and robustness of the proposed framework are verified by the fact that it outperforms previous methods in 100% decision-making metrics and 66% motion planning metrics. Furthermore, the ability of our framework to accurately generate BEV images over the long term is demonstrated through the task of driving scenario prediction. To the best of our knowledge, this is the first generative pre-trained large model for autonomous driving prediction, decision-making, and motion planning with only BEV images as input.