 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAV-AHDV-CAV: Mitigating Traffic Oscillations for CAVs through a Novel Car-Following Structure and Reinforcement Learning
Paper and Code
Jun 23, 2024
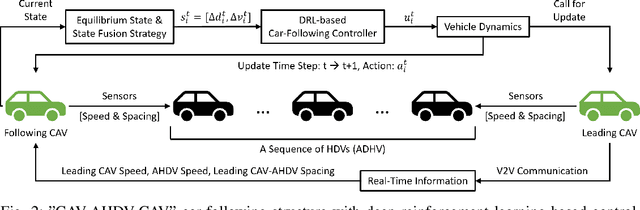


Connected and Automated Vehicles (CAVs) offer a promising solution to the challenges of mixed traffic with both CAVs and Human-Driven Vehicles (HDVs). A significant hurdle in such scenarios is traffic oscillation, or the "stop-and-go" pattern, during car-following situations. While HDVs rely on limited information, CAVs can leverage data from other CAVs for better decision-making. This allows CAVs to anticipate and mitigate the spread of deceleration waves that worsen traffic flow. We propose a novel "CAV-AHDV-CAV" car-following framework that treats the sequence of HDVs between two CAVs as a single entity, eliminating noise from individual driver behaviors. This deep reinforcement learning approach analyzes vehicle equilibrium states and employs a state fusion strategy. Trained and tested on diverse datasets (HighD, NGSIM, SPMD, Waymo, Lyft) encompassing over 70,000 car-following instances, our model outperforms baselines in collision avoidance, maintaining equilibrium with both preceding and leading vehicles and achieving the lowest standard deviation of time headway. These results demonstrate the effectiveness of our approach in developing robust CAV control strategies for mixed traffic. Our model has the potential to mitigate traffic oscillation, improve traffic flow efficiency, and enhance overall safety.