 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoyun: A Diffusion-Based Model for Style-Specific Chinese Calligraphy Generation
Oct 10, 2024



Although Chinese calligraphy generation has achieved style transfer, generating calligraphy by specifying the calligrapher, font, and character style remains challenging. To address this, we propose a new Chinese calligraphy generation model 'Moyun' , which replaces the Unet in the Diffusion model with Vision Mamba and introduces the TripleLabel control mechanism to achieve controllable calligraphy generation. The model was tested on our large-scale dataset 'Mobao' of over 1.9 million images, and the results demonstrate that 'Moyun' can effectively control the generation process and produce calligraphy in the specified style. Even for calligraphy the calligrapher has not written, 'Moyun' can generate calligraphy that matches the style of the calligrapher.
CAV-AHDV-CAV: Mitigating Traffic Oscillations for CAVs through a Novel Car-Following Structure and Reinforcement Learning
Jun 23, 2024
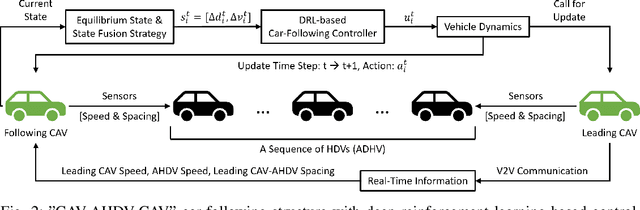


Connected and Automated Vehicles (CAVs) offer a promising solution to the challenges of mixed traffic with both CAVs and Human-Driven Vehicles (HDVs). A significant hurdle in such scenarios is traffic oscillation, or the "stop-and-go" pattern, during car-following situations. While HDVs rely on limited information, CAVs can leverage data from other CAVs for better decision-making. This allows CAVs to anticipate and mitigate the spread of deceleration waves that worsen traffic flow. We propose a novel "CAV-AHDV-CAV" car-following framework that treats the sequence of HDVs between two CAVs as a single entity, eliminating noise from individual driver behaviors. This deep reinforcement learning approach analyzes vehicle equilibrium states and employs a state fusion strategy. Trained and tested on diverse datasets (HighD, NGSIM, SPMD, Waymo, Lyft) encompassing over 70,000 car-following instances, our model outperforms baselines in collision avoidance, maintaining equilibrium with both preceding and leading vehicles and achieving the lowest standard deviation of time headway. These results demonstrate the effectiveness of our approach in developing robust CAV control strategies for mixed traffic. Our model has the potential to mitigate traffic oscillation, improve traffic flow efficiency, and enhance overall safety.
Neural Operators for Boundary Stabilization of Stop-and-go Traffic
Dec 16, 2023This paper introduces a novel approach to PDE boundary control design using neural operators to alleviate stop-and-go instabilities in congested traffic flow. Our framework leverages neural operators to design control strategies for traffic flow systems. The traffic dynamics are described by the Aw-Rascle-Zhang (ARZ) model, which comprises a set of second-order coupled hyperbolic partial differential equations (PDEs). Backstepping method is widely used for boundary control of such PDE systems. The PDE model-based control design can be time-consuming and require intensive depth of expertise since it involves constructing and solving backstepping control kernels. To overcome these challenges, we present two distinct neural operator (NO) learning schemes aimed at stabilizing the traffic PDE system. The first scheme embeds NO-approximated gain kernels within a predefined backstepping controller, while the second one directly learns a boundary control law. The Lyapunov analysis is conducted to evaluate the stability of the NO-approximated gain kernels and control law. It is proved that the NO-based closed-loop system is practical stable under certain approximation accuracy conditions in NO-learning. To validate the efficacy of the proposed approach, simulations are conducted to compare the performance of the two neural operator controllers with a PDE backstepping controller and a Proportional Integral (PI) controller. While the NO-approximated methods exhibit higher errors compared to the backstepping controller, they consistently outperform the PI controller, demonstrating faster computation speeds across all scenarios. This result suggests that neural operators can significantly expedite and simplify the process of obtaining boundary controllers in traffic PDE systems.