 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEcoFollower: An Environment-Friendly Car Following Model Considering Fuel Consumption
Jul 22, 2024



To alleviate energy shortages and environmental impacts caused by transportation, this study introduces EcoFollower, a novel eco-car-following model developed using reinforcement learning (RL) to optimize fuel consumption in car-following scenarios. Employing the NGSIM datasets, the performance of EcoFollower was assessed in comparison with the well-established Intelligent Driver Model (IDM). The findings demonstrate that EcoFollower excels in simulating realistic driving behaviors, maintaining smooth vehicle operations, and closely matching the ground truth metrics of time-to-collision (TTC), headway, and comfort. Notably, the model achieved a significant reduction in fuel consumption, lowering it by 10.42\% compared to actual driving scenarios. These results underscore the capability of RL-based models like EcoFollower to enhance autonomous vehicle algorithms, promoting safer and more energy-efficient driving strategies.
Continual Learning for Adaptable Car-Following in Dynamic Traffic Environments
Jul 17, 2024



The continual evolution of autonomous driving technology requires car-following models that can adapt to diverse and dynamic traffic environments. Traditional learning-based models often suffer from performance degradation when encountering unseen traffic patterns due to a lack of continual learning capabilities. This paper proposes a novel car-following model based on continual learning that addresses this limitation. Our framework incorporates Elastic Weight Consolidation (EWC) and Memory Aware Synapses (MAS) techniques to mitigate catastrophic forgetting and enable the model to learn incrementally from new traffic data streams. We evaluate the performance of the proposed model on the Waymo and Lyft datasets which encompass various traffic scenarios. The results demonstrate that the continual learning techniques significantly outperform the baseline model, achieving 0\% collision rates across all traffic conditions. This research contributes to the advancement of autonomous driving technology by fostering the development of more robust and adaptable car-following models.
GenFollower: Enhancing Car-Following Prediction with Large Language Models
Jul 08, 2024



Accurate modeling of car-following behaviors is essential for various applications in traffic management and autonomous driving systems. However, current approaches often suffer from limitations like high sensitivity to data quality and lack of interpretability. In this study, we propose GenFollower, a novel zero-shot prompting approach that leverages large language models (LLMs) to address these challenges. We reframe car-following behavior as a language modeling problem and integrate heterogeneous inputs into structured prompts for LLMs. This approach achieves improved prediction performance and interpretability compared to traditional baseline models. Experiments on the Waymo Open datasets demonstrate GenFollower's superior performance and ability to provide interpretable insights into factors influencing car-following behavior. This work contributes to advancing the understanding and prediction of car-following behaviors, paving the way for enhanced traffic management and autonomous driving systems.
EditFollower: Tunable Car Following Models for Customizable Adaptive Cruise Control Systems
Jun 23, 2024



In the realm of driving technologies, fully autonomous vehicles have not been widely adopted yet, making advanced driver assistance systems (ADAS) crucial for enhancing driving experiences. Adaptive Cruise Control (ACC) emerges as a pivotal component of ADAS. However, current ACC systems often employ fixed settings, failing to intuitively capture drivers' social preferences and leading to potential function disengagement. To overcome these limitations, we propose the Editable Behavior Generation (EBG) model, a data-driven car-following model that allows for adjusting driving discourtesy levels. The framework integrates diverse courtesy calculation methods into long short-term memory (LSTM) and Transformer architectures, offering a comprehensive approach to capture nuanced driving dynamics. By integrating various discourtesy values during the training process, our model generates realistic agent trajectories with different levels of courtesy in car-following behavior. Experimental results on the HighD and Waymo datasets showcase a reduction in Mean Squared Error (MSE) of spacing and MSE of speed compared to baselines, establishing style controllability. To the best of our knowledge, this work represents the first data-driven car-following model capable of dynamically adjusting discourtesy levels. Our model provides valuable insights for the development of ACC systems that take into account drivers' social preferences.
CAV-AHDV-CAV: Mitigating Traffic Oscillations for CAVs through a Novel Car-Following Structure and Reinforcement Learning
Jun 23, 2024
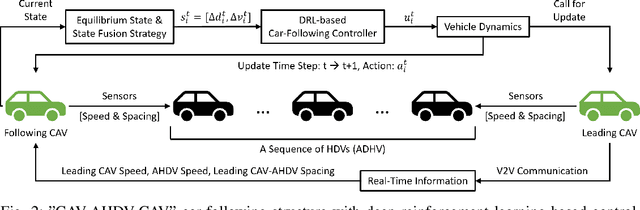


Connected and Automated Vehicles (CAVs) offer a promising solution to the challenges of mixed traffic with both CAVs and Human-Driven Vehicles (HDVs). A significant hurdle in such scenarios is traffic oscillation, or the "stop-and-go" pattern, during car-following situations. While HDVs rely on limited information, CAVs can leverage data from other CAVs for better decision-making. This allows CAVs to anticipate and mitigate the spread of deceleration waves that worsen traffic flow. We propose a novel "CAV-AHDV-CAV" car-following framework that treats the sequence of HDVs between two CAVs as a single entity, eliminating noise from individual driver behaviors. This deep reinforcement learning approach analyzes vehicle equilibrium states and employs a state fusion strategy. Trained and tested on diverse datasets (HighD, NGSIM, SPMD, Waymo, Lyft) encompassing over 70,000 car-following instances, our model outperforms baselines in collision avoidance, maintaining equilibrium with both preceding and leading vehicles and achieving the lowest standard deviation of time headway. These results demonstrate the effectiveness of our approach in developing robust CAV control strategies for mixed traffic. Our model has the potential to mitigate traffic oscillation, improve traffic flow efficiency, and enhance overall safety.