 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCHILLGuard: Towards Fine-Grained Chinese LLM Safety Guardrail with Scalable Data Construction and Model-aware Preference Alignment
Jun 13, 2026Malicious content generated from large language models (LLMs) could pose severe safety risks and ethical concerns. While existing LLM safety guardrails excel in English or multilingual settings, they lack adaptation to Chinese-specific regulatory policies, cultural context and linguistic nuances, failing to support fine-grained risk classification for diverse deployment needs. In this paper, we introduce a 5-macro, 31-micro category fine-grained risk taxonomy for Chinese scenarios, and build CHILLGuard: a dedicated Chinese LLM content safety guardrail. To address the critical scarcity of high-quality annotated Chinese safety data, we propose a scalable multi-stage data construction pipeline: we expand multi-source corpus via retrieval-augmented generation, generate implicit harmful samples through prompt engineering rewriting, and refine high-quality data via multi-model voting-based label calibration. Based on this, we build CHILLGuardTrain, a large-scale training set with 405,007 samples, and CHILLGuardTest, a rigorously curated annotated test set with 51,745 samples. We then train CHILLGuard on CHILLGuardTrain under a generator-classifier collaborative framework via Model-aware Direct Preference Optimization. Extensive experiments under multiple settings demonstrate the state-of-the-art performance of CHILLGuard, e.g., a 15.92% improvement of F1 score over Qwen3Guard-8B-Strict on our benchmark. We will release our resources at https://github.com/cswbyu/CHILLGuard.
Bypassing Copyright Protection in Diffusion-based Customization via Two-Stage Latent Feature Optimization
Jun 06, 2026With the growing concerns over copyright infringement in diffusion-based customization, adversarial attacks have emerged as a prominent defense strategy to prevent malicious content forgery in personalized image generation. However, current defenses typically introduce persistent perturbations in the latent space of Latent Diffusion Models (LDMs), which remain susceptible to adaptive bypasses by adversaries. In this paper, we introduce Two-Stage Latent Feature Optimization (TS-LFO), an efficient and effective copyright-stealing attack against protected diffusion-based customization. We begin by observing that existing defenses primarily disrupt the mapping between input images and their latent representations, thereby degrading the model's ability to produce personalized outputs. To counteract this, TS-LFO restores the broken mapping through a two-stage optimization process. In the Latent Denoising Stage, we enhance semantic consistency between latent codes and input images by jointly minimizing a Latent-Image Alignment Loss and a Latent Diffusion Loss with timestep-dependent weights, effectively suppressing the high-frequency noise introduced by defenses. In the Latent Reconstruction Stage, we recover low-frequency semantic information using pixel-level constraints to refine the latent features. Extensive experiments show that TS-LFO consistently bypasses state-of-the-art (SOTA) copyright defenses and outperforms SOTA copyright attacks such as DiffPure, GrIDPure and IMPRESS across diverse settings.
Affordance2Action: Task-Conditioned Scene-level Affordance Grounding for Real-Time Manipulation
Jun 02, 2026Task-conditioned manipulation requires grounding instructions to task-relevant functional parts rather than object categories. This setting is scene-dependent and often one-to-many in cluttered scenes: the same object may afford different interactions across tasks, while a single task may correspond to either one functional region or multiple valid functional regions, depending on the scene layout. Existing affordance datasets and benchmarks remain misaligned with this setting, as they typically focus on grasping or object-level affordances, rely on synthetic scenes, or assume a single instruction-region correspondence. We present Affordance2Action (A2A), a benchmark-centered learning framework for scene-level, task-conditioned part affordance grounding. At its core is A2A-Bench, a manipulation-oriented benchmark that covers both single-region and multi-region instruction correspondences in everyday scenes, with the latter highlighting the ambiguity and diversity of affordance grounding in realistic multi-object environments. To construct it at scale, we build A2A-AffordGen, an agent-assisted annotation pipeline that combines language-model filtering, interactive part segmentation, instance-level mask-out refinement, task-reasoning instruction generation, and human verification. A2A-Bench's supervision further supports diverse downstream applications, with real-time affordance grounding and affordance-conditioned manipulation policies as two representative examples. Experiments show that A2A exposes substantial gaps in generic segmentation, VLM-based grounding, and affordance distillation baselines, while improving task-level localization and providing useful spatial priors for downstream manipulation. All datasets and code will be publicly released to promote open research.
Enhancing Gradient Inversion Attacks in Federated Learning via Hierarchical Feature Optimization
Apr 01, 2026Federated Learning (FL) has emerged as a compelling paradigm for privacy-preserving distributed machine learning, allowing multiple clients to collaboratively train a global model by transmitting locally computed gradients to a central server without exposing their private data. Nonetheless, recent studies find that the gradients exchanged in the FL system are also vulnerable to privacy leakage, e.g., an attacker can invert shared gradients to reconstruct sensitive data by leveraging pre-trained generative adversarial networks (GAN) as prior knowledge. However, existing attacks simply perform gradient inversion in the latent space of the GAN model, which limits their expression ability and generalizability. To tackle these challenges, we propose \textbf{G}radient \textbf{I}nversion over \textbf{F}eature \textbf{D}omains (GIFD), which disassembles the GAN model and searches the hierarchical features of the intermediate layers. Instead of optimizing only over the initial latent code, we progressively change the optimized layer, from the initial latent space to intermediate layers closer to the output images. In addition, we design a regularizer to avoid unreal image generation by adding a small ${l_1}$ ball constraint to the searching range. We also extend GIFD to the out-of-distribution (OOD) setting, which weakens the assumption that the training sets of GANs and FL tasks obey the same data distribution. Furthermore, we consider the challenging OOD scenario of label inconsistency and propose a label mapping technique as an effective solution. Extensive experiments demonstrate that our method can achieve pixel-level reconstruction and outperform competitive baselines across a variety of FL scenarios.
RAVEL: Reasoning Agents for Validating and Evaluating LLM Text Synthesis
Feb 28, 2026Large Language Models have evolved from single-round generators into long-horizon agents, capable of complex text synthesis scenarios. However, current evaluation frameworks lack the ability to assess the actual synthesis operations, such as outlining, drafting, and editing. Consequently, they fail to evaluate the actual and detailed capabilities of LLMs. To bridge this gap, we introduce RAVEL, an agentic framework that enables the LLM testers to autonomously plan and execute typical synthesis operations, including outlining, drafting, reviewing, and refining. Complementing this framework, we present C3EBench, a comprehensive benchmark comprising 1,258 samples derived from professional human writings. We utilize a "reverse-engineering" pipeline to isolate specific capabilities across four tasks: Cloze, Edit, Expand, and End-to-End. Through our analysis of 14 LLMs, we uncover that most LLMs struggle with tasks that demand contextual understanding under limited or under-specified instructions. By augmenting RAVEL with SOTA LLMs as operators, we find that such agentic text synthesis is dominated by the LLM's reasoning capability rather than raw generative capacity. Furthermore, we find that a strong reasoner can guide a weaker generator to yield higher-quality results, whereas the inverse does not hold. Our code and data are available at this link: https://github.com/ZhuoerFeng/RAVEL-Reasoning-Agents-Text-Eval.
TraceSIR: A Multi-Agent Framework for Structured Analysis and Reporting of Agentic Execution Traces
Feb 28, 2026Agentic systems augment large language models with external tools and iterative decision making, enabling complex tasks such as deep research, function calling, and coding. However, their long and intricate execution traces make failure diagnosis and root cause analysis extremely challenging. Manual inspection does not scale, while directly applying LLMs to raw traces is hindered by input length limits and unreliable reasoning. Focusing solely on final task outcomes further discards critical behavioral information required for accurate issue localization. To address these issues, we propose TraceSIR, a multi-agent framework for structured analysis and reporting of agentic execution traces. TraceSIR coordinates three specialized agents: (1) StructureAgent, which introduces a novel abstraction format, TraceFormat, to compress execution traces while preserving essential behavioral information; (2) InsightAgent, which performs fine-grained diagnosis including issue localization, root cause analysis, and optimization suggestions; (3) ReportAgent, which aggregates insights across task instances and generates comprehensive analysis reports. To evaluate TraceSIR, we construct TraceBench, covering three real-world agentic scenarios, and introduce ReportEval, an evaluation protocol for assessing the quality and usability of analysis reports aligned with industry needs. Experiments show that TraceSIR consistently produces coherent, informative, and actionable reports, significantly outperforming existing approaches across all evaluation dimensions. Our project and video are publicly available at https://github.com/SHU-XUN/TraceSIR.
GeCo-SRT: Geometry-aware Continual Adaptation for Robotic Cross-Task Sim-to-Real Transfer
Feb 25, 2026Bridging the sim-to-real gap is important for applying low-cost simulation data to real-world robotic systems. However, previous methods are severely limited by treating each transfer as an isolated endeavor, demanding repeated, costly tuning and wasting prior transfer experience. To move beyond isolated sim-to-real, we build a continual cross-task sim-to-real transfer paradigm centered on knowledge accumulation across iterative transfers, thereby enabling effective and efficient adaptation to novel tasks. Thus, we propose GeCo-SRT, a geometry-aware continual adaptation method. It utilizes domain-invariant and task-invariant knowledge from local geometric features as a transferable foundation to accelerate adaptation during subsequent sim-to-real transfers. This method starts with a geometry-aware mixture-of-experts module, which dynamically activates experts to specialize in distinct geometric knowledge to bridge observation sim-to-real gap. Further, the geometry-expert-guided prioritized experience replay module preferentially samples from underutilized experts, refreshing specialized knowledge to combat forgetting and maintain robust cross-task performance. Leveraging knowledge accumulated during iterative transfer, GeCo-SRT method not only achieves 52% average performance improvement over the baseline, but also demonstrates significant data efficiency for new task adaptation with only 1/6 data. We hope this work inspires approaches for efficient, low-cost cross-task sim-to-real transfer.
GLM-5: from Vibe Coding to Agentic Engineering
Feb 17, 2026We present GLM-5, a next-generation foundation model designed to transition the paradigm of vibe coding to agentic engineering. Building upon the agentic, reasoning, and coding (ARC) capabilities of its predecessor, GLM-5 adopts DSA to significantly reduce training and inference costs while maintaining long-context fidelity. To advance model alignment and autonomy, we implement a new asynchronous reinforcement learning infrastructure that drastically improves post-training efficiency by decoupling generation from training. Furthermore, we propose novel asynchronous agent RL algorithms that further improve RL quality, enabling the model to learn from complex, long-horizon interactions more effectively. Through these innovations, GLM-5 achieves state-of-the-art performance on major open benchmarks. Most critically, GLM-5 demonstrates unprecedented capability in real-world coding tasks, surpassing previous baselines in handling end-to-end software engineering challenges. Code, models, and more information are available at https://github.com/zai-org/GLM-5.
Beyond Literal Mapping: Benchmarking and Improving Non-Literal Translation Evaluation
Jan 12, 2026Large Language Models (LLMs) have significantly advanced Machine Translation (MT), applying them to linguistically complex domains-such as Social Network Services, literature etc. In these scenarios, translations often require handling non-literal expressions, leading to the inaccuracy of MT metrics. To systematically investigate the reliability of MT metrics, we first curate a meta-evaluation dataset focused on non-literal translations, namely MENT. MENT encompasses four non-literal translation domains and features source sentences paired with translations from diverse MT systems, with 7,530 human-annotated scores on translation quality. Experimental results reveal the inaccuracies of traditional MT metrics and the limitations of LLM-as-a-Judge, particularly the knowledge cutoff and score inconsistency problem. To mitigate these limitations, we propose RATE, a novel agentic translation evaluation framework, centered by a reflective Core Agent that dynamically invokes specialized sub-agents. Experimental results indicate the efficacy of RATE, achieving an improvement of at least 3.2 meta score compared with current metrics. Further experiments demonstrate the robustness of RATE to general-domain MT evaluation. Code and dataset are available at: https://github.com/BITHLP/RATE.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025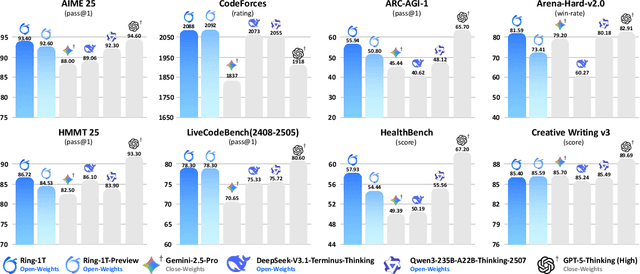
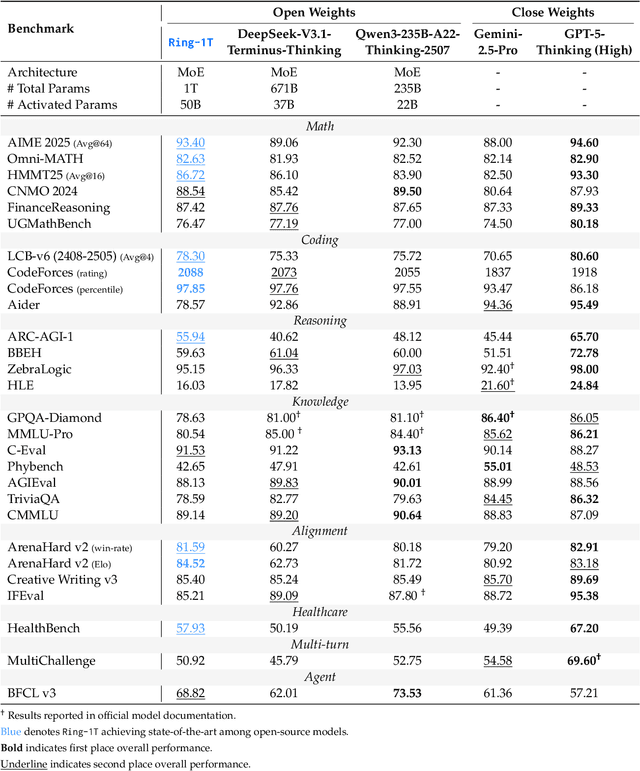
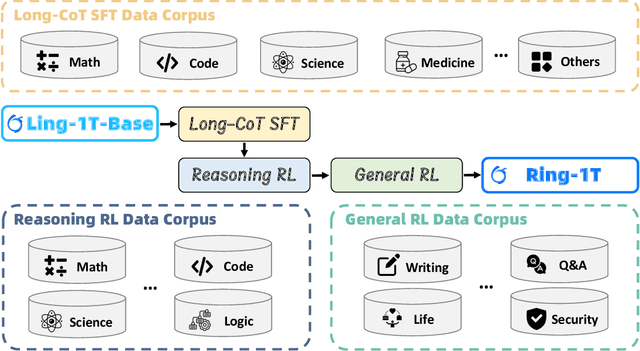
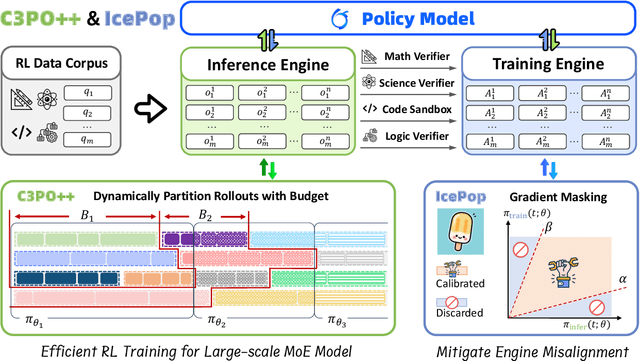
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.