 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTDANet: A Novel Temporal Denoise Convolutional Neural Network With Attention for Fault Diagnosis
Mar 29, 2024



Fault diagnosis plays a crucial role in maintaining the operational integrity of mechanical systems, preventing significant losses due to unexpected failures. As intelligent manufacturing and data-driven approaches evolve, Deep Learning (DL) has emerged as a pivotal technique in fault diagnosis research, recognized for its ability to autonomously extract complex features. However, the practical application of current fault diagnosis methods is challenged by the complexity of industrial environments. This paper proposed the Temporal Denoise Convolutional Neural Network With Attention (TDANet), designed to improve fault diagnosis performance in noise environments. This model transforms one-dimensional signals into two-dimensional tensors based on their periodic properties, employing multi-scale 2D convolution kernels to extract signal information both within and across periods. This method enables effective identification of signal characteristics that vary over multiple time scales. The TDANet incorporates a Temporal Variable Denoise (TVD) module with residual connections and a Multi-head Attention Fusion (MAF) module, enhancing the saliency of information within noisy data and maintaining effective fault diagnosis performance. Evaluation on two datasets, CWRU (single sensor) and Real aircraft sensor fault (multiple sensors), demonstrates that the TDANet model significantly outperforms existing deep learning approaches in terms of diagnostic accuracy under noisy environments.
Scalable and reliable deep transfer learning for intelligent fault detection via multi-scale neural processes embedded with knowledge
Feb 20, 2024



Deep transfer learning (DTL) is a fundamental method in the field of Intelligent Fault Detection (IFD). It aims to mitigate the degradation of method performance that arises from the discrepancies in data distribution between training set (source domain) and testing set (target domain). Considering the fact that fault data collection is challenging and certain faults are scarce, DTL-based methods face the limitation of available observable data, which reduces the detection performance of the methods in the target domain. Furthermore, DTL-based methods lack comprehensive uncertainty analysis that is essential for building reliable IFD systems. To address the aforementioned problems, this paper proposes a novel DTL-based method known as Neural Processes-based deep transfer learning with graph convolution network (GTNP). Feature-based transfer strategy of GTNP bridges the data distribution discrepancies of source domain and target domain in high-dimensional space. Both the joint modeling based on global and local latent variables and sparse sampling strategy reduce the demand of observable data in the target domain. The multi-scale uncertainty analysis is obtained by using the distribution characteristics of global and local latent variables. Global analysis of uncertainty enables GTNP to provide quantitative values that reflect the complexity of methods and the difficulty of tasks. Local analysis of uncertainty allows GTNP to model uncertainty (confidence of the fault detection result) at each sample affected by noise and bias. The validation of the proposed method is conducted across 3 IFD tasks, consistently showing the superior detection performance of GTNP compared to the other DTL-based methods.
Fault Detection and Classification of Aerospace Sensors using a VGG16-based Deep Neural Network
Jul 27, 2022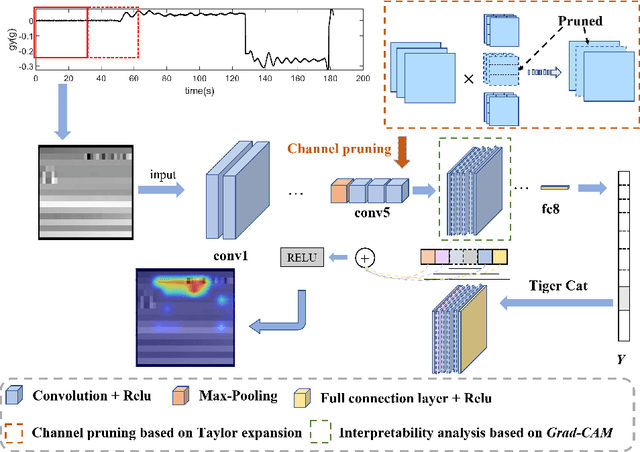
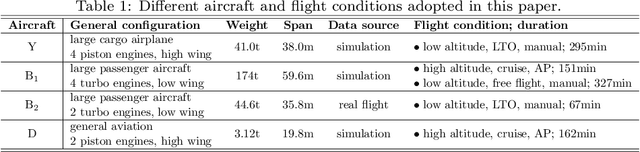


Compared with traditional model-based fault detection and classification (FDC) methods, deep neural networks (DNN) prove to be effective for the aerospace sensors FDC problems. However, time being consumed in training the DNN is excessive, and explainability analysis for the FDC neural network is still underwhelming. A concept known as imagefication-based intelligent FDC has been studied in recent years. This concept advocates to stack the sensors measurement data into an image format, the sensors FDC issue is then transformed to abnormal regions detection problem on the stacked image, which may well borrow the recent advances in the machine vision vision realm. Although promising results have been claimed in the imagefication-based intelligent FDC researches, due to the low size of the stacked image, small convolutional kernels and shallow DNN layers were used, which hinders the FDC performance. In this paper, we first propose a data augmentation method which inflates the stacked image to a larger size (correspondent to the VGG16 net developed in the machine vision realm). The FDC neural network is then trained via fine-tuning the VGG16 directly. To truncate and compress the FDC net size (hence its running time), we perform model pruning on the fine-tuned net. Class activation mapping (CAM) method is also adopted for explainability analysis of the FDC net to verify its internal operations. Via data augmentation, fine-tuning from VGG16, and model pruning, the FDC net developed in this paper claims an FDC accuracy 98.90% across 4 aircraft at 5 flight conditions (running time 26 ms). The CAM results also verify the FDC net w.r.t. its internal operations.
Augmented Imagefication: A Data-driven Fault Detection Method for Aircraft Air Data Sensors
Jun 28, 2022



In this paper, a novel data-driven approach named Augmented Imagefication for Fault detection (FD) of aircraft air data sensors (ADS) is proposed. Exemplifying the FD problem of aircraft air data sensors, an online FD scheme on edge device based on deep neural network (DNN) is developed. First, the aircraft inertial reference unit measurements is adopted as equivalent inputs, which is scalable to different aircraft/flight cases. Data associated with 6 different aircraft/flight conditions are collected to provide diversity (scalability) in the training/testing database. Then Augmented Imagefication is proposed for the DNN-based prediction of flying conditions. The raw data are reshaped as a grayscale image for convolutional operation, and the necessity of augmentation is analyzed and pointed out. Different kinds of augmented method, i.e. Flip, Repeat, Tile and their combinations are discussed, the result shows that the All Repeat operation in both axes of image matrix leads to the best performance of DNN. The interpretability of DNN is studied based on Grad-CAM, which provide a better understanding and further solidifies the robustness of DNN. Next the DNN model, VGG-16 with augmented imagefication data is optimized for mobile hardware deployment. After pruning of DNN, a lightweight model (98.79% smaller than original VGG-16) with high accuracy (slightly up by 0.27%) and fast speed (time delay is reduced by 87.54%) is obtained. And the hyperparameters optimization of DNN based on TPE is implemented and the best combination of hyperparameters is determined (learning rate 0.001, iterative epochs 600, and batch size 100 yields the highest accuracy at 0.987). Finally, a online FD deployment based on edge device, Jetson Nano, is developed and the real time monitoring of aircraft is achieved. We believe that this method is instructive for addressing the FD problems in other similar fields.
Mcity Data Collection for Automated Vehicles Study
Dec 12, 2019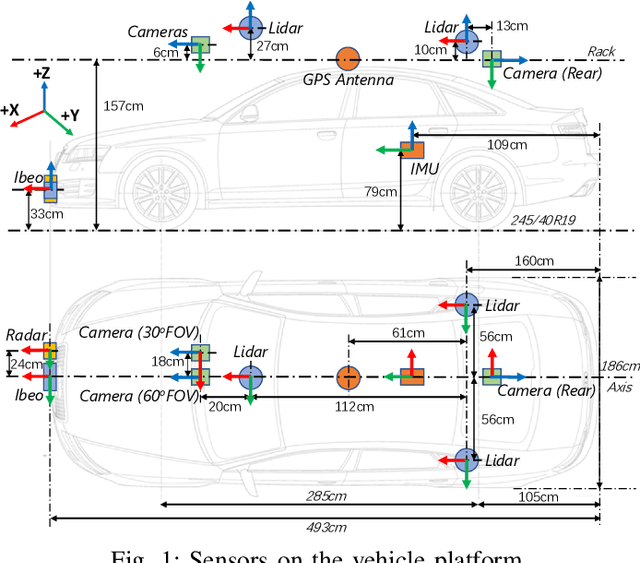
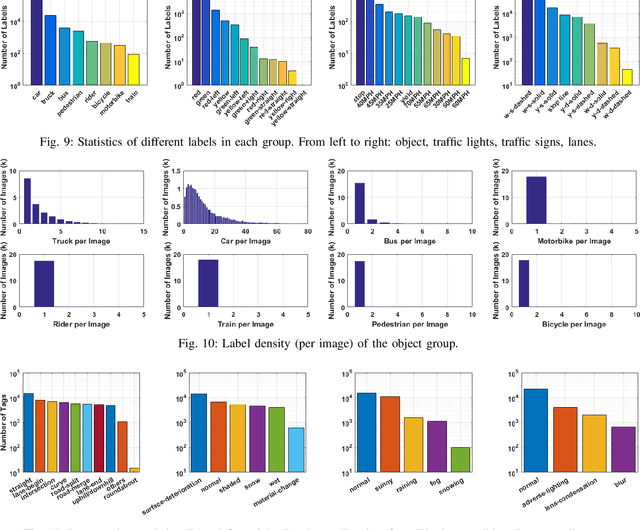
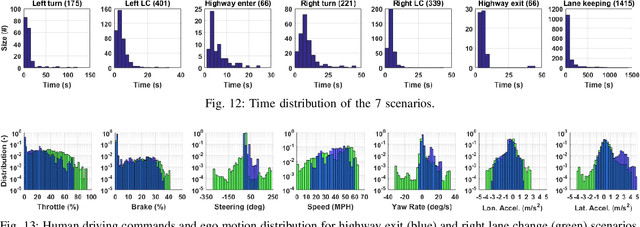
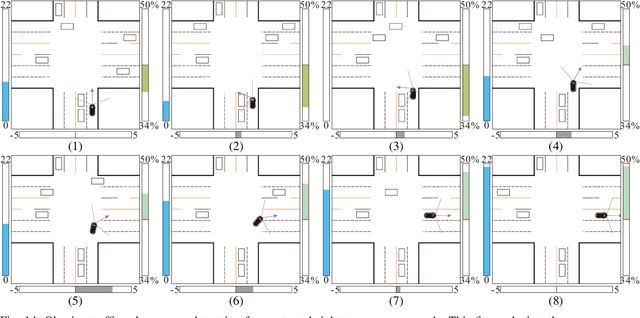
The main goal of this paper is to introduce the data collection effort at Mcity targeting automated vehicle development. We captured a comprehensive set of data from a set of perception sensors (Lidars, Radars, Cameras) as well as vehicle steering/brake/throttle inputs and an RTK unit. Two in-cabin cameras record the human driver's behaviors for possible future use. The naturalistic driving on selected open roads is recorded at different time of day and weather conditions. We also perform designed choreography data collection inside the Mcity test facility focusing on vehicle to vehicle, and vehicle to vulnerable road user interactions which is quite unique among existing open-source datasets. The vehicle platform, data content, tags/labels, and selected analysis results are shown in this paper.